
 В Froyo появился новый класс android.net.TrafficStats с функцией getUidRxBytes(int uid) и getUidTxBytes(int uid) который позволяет для каждого приложения получить объем отправленного/полученного трафика. Сразу родилась идея написать простенькую программу, мне кажется гугловцы это и имели ввиду когда делали эту функцию. Программа при вызове и раз в час обновляет значения, чтобы не потерять данные при перезагрузке, так же есть кнопка обновления для параноиков.
В Froyo появился новый класс android.net.TrafficStats с функцией getUidRxBytes(int uid) и getUidTxBytes(int uid) который позволяет для каждого приложения получить объем отправленного/полученного трафика. Сразу родилась идея написать простенькую программу, мне кажется гугловцы это и имели ввиду когда делали эту функцию. Программа при вызове и раз в час обновляет значения, чтобы не потерять данные при перезагрузке, так же есть кнопка обновления для параноиков.Очень полезная и простая программа, которая показывает сколько трафика используют различные программы. Показывает в каких приложениях больше всего расходуется трафик.


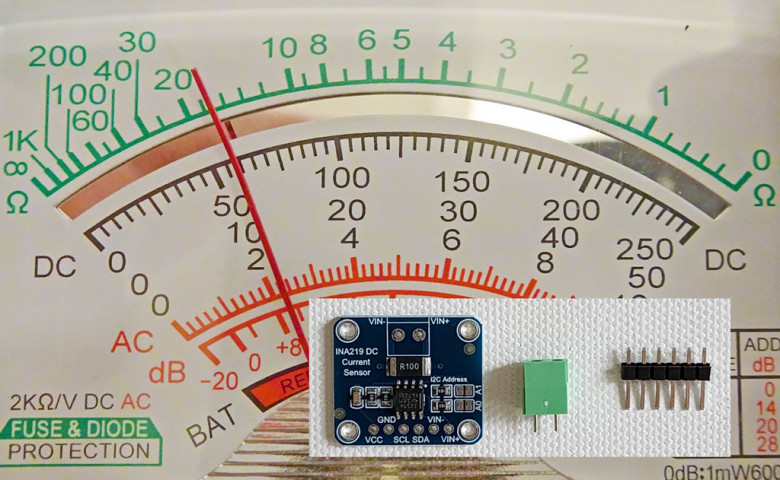
 Понадобилось мне срочно собрать простенький логгер данных для одного старого промышленного газоанализатора, у которого были лишь токовые выводы на бумажные самописцы. Вроде простенькая задача, но повеселила она меня знатно. Подробности этой истории под катом. Выводы там же.
Понадобилось мне срочно собрать простенький логгер данных для одного старого промышленного газоанализатора, у которого были лишь токовые выводы на бумажные самописцы. Вроде простенькая задача, но повеселила она меня знатно. Подробности этой истории под катом. Выводы там же.  Ежегодно в России из-за утечки бытового газа происходят десятки взрывов. В частности, грустный рекорд был отмечен в 2008 году, когда только в январе произошло 7
Ежегодно в России из-за утечки бытового газа происходят десятки взрывов. В частности, грустный рекорд был отмечен в 2008 году, когда только в январе произошло 7 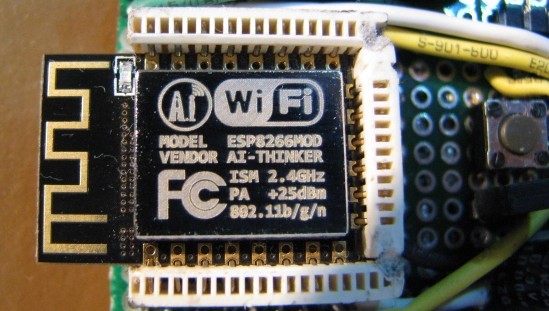
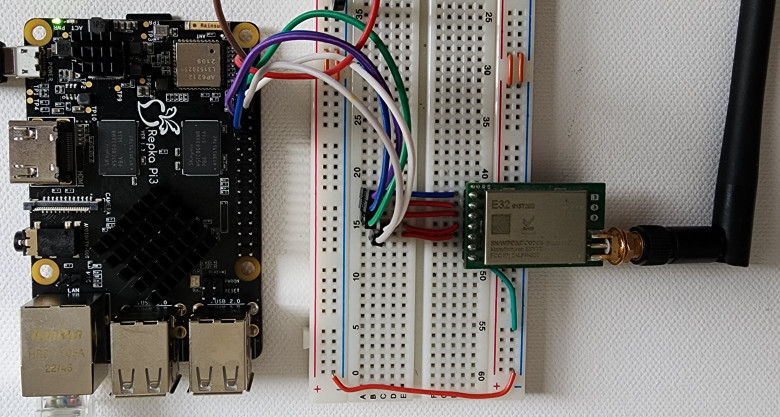
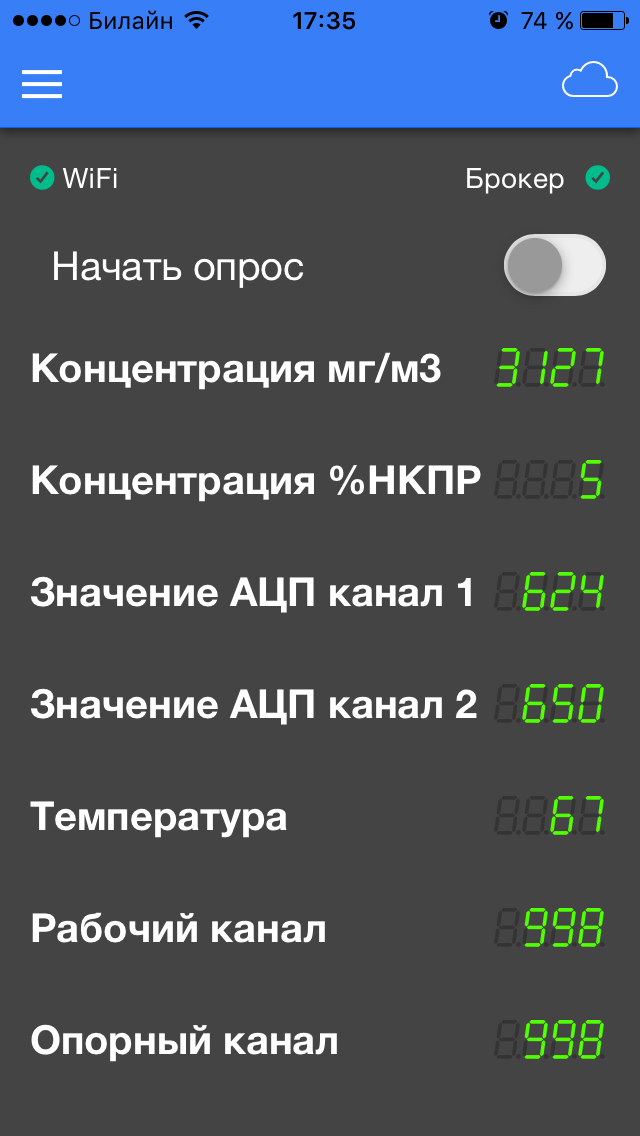 Как говорится, лень — двигатель прогресса. Для облегчения жизни сейчас делаю себе небольшое устройство в виде модуля ESP8266 и преобразователя RS485 для связи с датчиками-газоанализаторами по протоколу Modbus. В производстве постоянно возникает необходимость подключаться к приборам для выполнения различного рода диагностики по 485 интерфейсу, но каждый раз тащить с собой ноутбук неудобно, а вот мобильный телефон всегда в кармане.
Как говорится, лень — двигатель прогресса. Для облегчения жизни сейчас делаю себе небольшое устройство в виде модуля ESP8266 и преобразователя RS485 для связи с датчиками-газоанализаторами по протоколу Modbus. В производстве постоянно возникает необходимость подключаться к приборам для выполнения различного рода диагностики по 485 интерфейсу, но каждый раз тащить с собой ноутбук неудобно, а вот мобильный телефон всегда в кармане.
 Как-то раз в голове возникла мысль, а что бы сделать такое, чтобы скрестить старый радиоприемник в деревянном корпусе и современный контроллер для интернета-вещей ESP32? То ли с головой не так что-то, то ли делать мне нечего, но скрестить получилось. Не шаблонно, в целом, хотя судить вам, дорогие читатели Хабра).
Как-то раз в голове возникла мысль, а что бы сделать такое, чтобы скрестить старый радиоприемник в деревянном корпусе и современный контроллер для интернета-вещей ESP32? То ли с головой не так что-то, то ли делать мне нечего, но скрестить получилось. Не шаблонно, в целом, хотя судить вам, дорогие читатели Хабра). {kind=link}