
Как найти 3D координаты объектов на изображении?
Статья о задаче пространственной локализации объектов на изображении с одной камеры и о её решении с помощью OpenCV

User
Как найти 3D координаты объектов на изображении?
Статья о задаче пространственной локализации объектов на изображении с одной камеры и о её решении с помощью OpenCV

Легкий и простой способ настроить бесплатную синхронизацию Obsidian между всеми своими устройствами.

О том, как сделать прозрачную синхронизацию заметок Obsidian между устройствами (Desktop, Android, iOS) через GitHub:
1. Без сторонних приложений (вроде iCloud, SyncThing, Termux и пр)
2. Бесплатно
3. Бонусом — резервная копия: как самих заметок, так и истории изменений.
В результате получается полноценная замена Notion: структурированные заметки с автоматической синхронизацией между устройствами.

В настоящее время существует множество видов навигации автономных беспилотных аппаратов и роботов. В целом их можно разделить на навигацию внутри помещений – indoor, и вне помещений – outdoor.
В свою очередь, навигация внутри помещений также направлена на решение множества задач. Как правило, это мобильные роботы, предназначенные для перемещения грузов на складе, роботы пылесосы, роботы для мерчандайзинга, интерактивного общения с клиентами, официанты и т.д. Когда мы переходим к навигации внутри помещений, то сразу теряем все преимущества спутниковой навигации, потому что спутниковый сигнал, как правило, не достигает устройств сквозь бетонные и металлические конструкции. С другой стороны, благодаря тому что пространство внутри зданий зачастую ограниченно относительно небольшими площадями, можно воспользоваться такими средствами навигации, как триангуляция, навигация по различным меткам (QR коды с указанием последующих команд для робота, сигнальные линии по ходу движения, метки на стенах для коррекции местоположения), SLAM навигация, а также комбинации вышеперечисленных методов.
Здравствуйте, читатели Хабра! Решил активнее вкатываться в DS (хотя уже больше года в "теме" и даже нет ни одной публикации, ужас) и написать первую статью на Хабре.
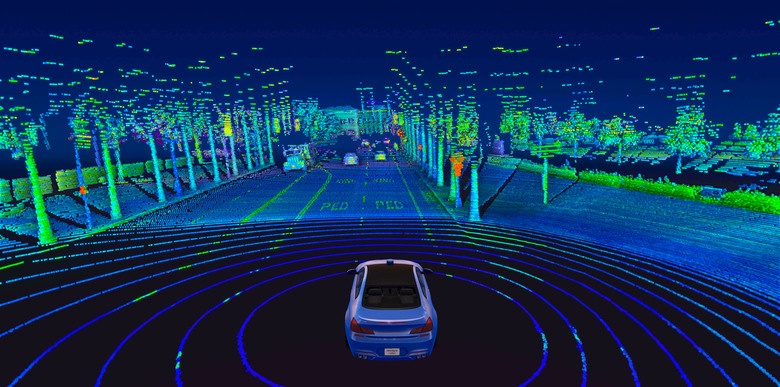
В данной публикации я расскажу о проекте для детекции дефектов дорожного покрытия с использованием лидара, проблемах с данными и как нам помогли алгоритмы RANSAC, ICP, а так же линейная алгебра. Конечно же с каплей математики и реализацией в коде, поэтому будет интересно, если вы не знакомы еще с данными алгоритмами.
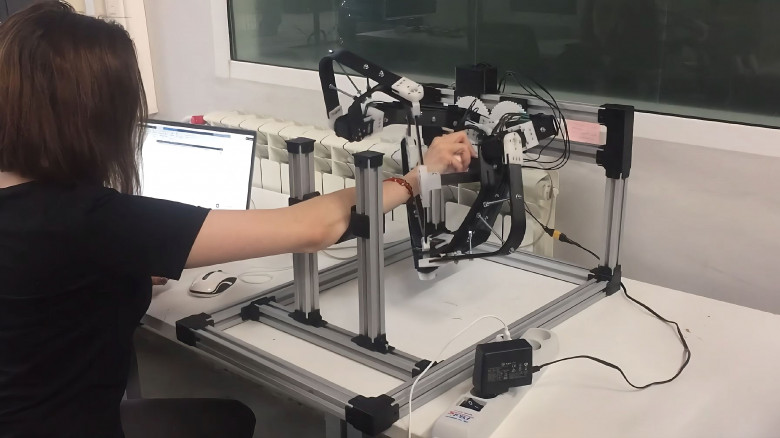
Привет, Хабр! Сегодня мы позвали в наш блог Валерию Скворцову — ассистента Лаборатории робототехники Университета Иннополис, чтобы она рассказала о разработке научного прототипа робота для реабилитации кистей рук при парезах, вызванных, например, инсультом. Робот спроектирован по принципу параллельного сферического манипулятора, и хотя проект еще не завершен, там уже есть на что посмотреть. Передаем ей слово.


Привет, Хабр!
Когда-то я писал веб-приложения. Решал задачи бизнеса, деплой в прод, REST, тесты, метрики, кубики. Всё было нормально. Но в какой-то момент мне стало… скучно.
Да, задачи были интересными. Команда — отличной. Но где-то внутри появилась пустота. Хотелось делать что-то настоящее. Осязаемое. Что-то, где за твоим кодом — больше, чем UI и API. Хотелось влиять на реальный мир.
Так я попал в мир электропривода.

Всех приветствую читатели Хабра
Сегодня я поведую о личном опыте настройки браузера Firefox (далее просто лиса, огнелис), причем настройки нацеленной на приватный и безопасный серфинг.
И как всегда просьба не переходить на личности в комментариях, если вы обнаружили ошибку недочет или неточность, просто без оскорблений напишите комментарий или напишите мне личным сообщением. Я просто делюсь своим опытом (а я пользуюсь лисой с 2019 года и имею небольшой опыт) и не более.
А побудило меня написать статью по данной тематике то, что в русскоязычном сегменте всемирной паутины либо очень мало информации по данной теме, либо она есть, но разрозненна, и информацию приходилось собирать по крупицам
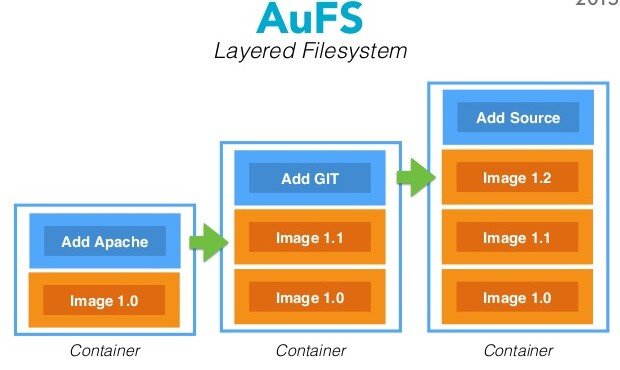
В этой статье я расскажу об инструкциях Docker, о том как написать Dockerfile и о существующих best practice для этого!

Краткий гид по основам библиотеки NumPy и основным линейно-алгебраическим операциям с её использованием

В данной работе представлен процесс разработки и симуляции мобильного робота с использованием платформы ROS Noetic и среды Gazebo. Описано создание URDF-модели робота, которая включает в себя детальное описание всех его компонентов. Рассмотрена разработка Docker контейнера, что позволяет обеспечить унификацию и воспроизводимость среды разработки. Также описаны файлы конфигурации для управления моделью в Gazebo и настройка PID контроллеров для оптимизации управления движением. Проект включает в себя формирование собственного мира в Gazebo, что позволяет тестировать робота в контролируемой и настраиваемой среде.

В статье рассмотрим пример того как в XeLaTeX можно настроить форматирование отдельных элементов текста, автоматически создавать таблицы, рисунки. В первую очередь будет интересна тем кто собирается оформлять ВКР (выпускная квалификационная работа) бакалавра или магистра, писать диссертации и т. п., а также тем кто много создаёт текстов, презентаций с формулами. Статья основана на опыте написания ВКР, отчётов, оформления презентаций с большим количеством формул, таблиц и рисунков.

Ещё 10–20 лет назад многие думали, что роботы под управлением искусственного интеллекта возьмут на себя всю тяжёлую и опасную работу на предприятиях. Однако нейросети нашли применение в офисах, колл‑центрах, службе поддержки и даже стали полезны людям из творческих профессий — копирайтерам, дизайнерам, программистам. Тем не менее создание роботов, которые могут самостоятельно выполнять сложные физические манипуляции с материальными объектами, остаётся трудной и нерешённой задачей.
В этой статье я расскажу, как команда ML R&D в отделе робототехники Маркета создаёт роборуку и обучает нейросети, благодаря которым робот взаимодействует с физическим миром.

Привет, Хабр! Я не являюсь преподавателем английского языка, но, как и многие присутствующие, долгие годы хотел постигнуть его дебри. В школе я от всего сердца завидовал ребятам, которым он даётся налегке, без видимых трудностей. Я же зубрил, пытался понять, получал двойки… и люто ненавидел английский язык как школьный предмет. Мечтал владеть, но совсем не хотел учить. После школы и университета приступал к его изучению несколько раз, однако каждый мой всплеск быстро угасал.
Наконец случилось чудо. В одну из очередных попыток я нащупал способ, который позволил продолжать развиваться, делать успехи, осознавать их и разжигать мой огонь всё сильнее и сильнее. Сегодня мне сложно представить день, проведенный без английского языка. И мне не хочется говорить без “изучения”, поскольку не сказал бы, что я именно учу. Скорее — постепенно “прошиваюсь” английским, как это обычно происходит с новорожденным детьми, которые постепенно начинают говорить, слушая и наблюдая за своими родителями. В настоящее время мой словарный запас не такой большой: 9 — 12 тысяч слов (зависит от теста). Я свободно смотрю видео на Ютубе разнообразной тематики (видеоуроки, спорт, фитнес, музыка, путешествия, кулинария, обзоры и т.д.), читаю документацию, компьютерную и популярную литературу, публицистику.

Статья подробно описывает процесс установки ROS2 версии Humble на операционной системе Ubuntu 22.04 и последующую настройку нод ROS2 для получения изображений, их передачи через топики, а также получение и примеры обработки в других нодах.
В данной статье будут рассмотрены подходы и библиотеки, предоставляемые ROS для решения задач автономной и не очень навигации.
Также будут рассмотрены несколько специфичных для антропоморфных роботов пакетов. Любой робот (наверняка даже машинка со средне-мощным бортовым ПК под управлением Linux и парой веб камер) наверняка найдет здесь что — нибудь для себя.