Когда-нибудь задумывались зачем сегодня нужны роботы? С детства мне казалось, что роботы стоят где-то на современных фабриках, что это где-то далеко от нас. Или в фантастике.
Но уже нет. Роботы на сегодня — это автоматизация любого рутинного процесса. Их могут ставить и на фермах, и в автомастерских.
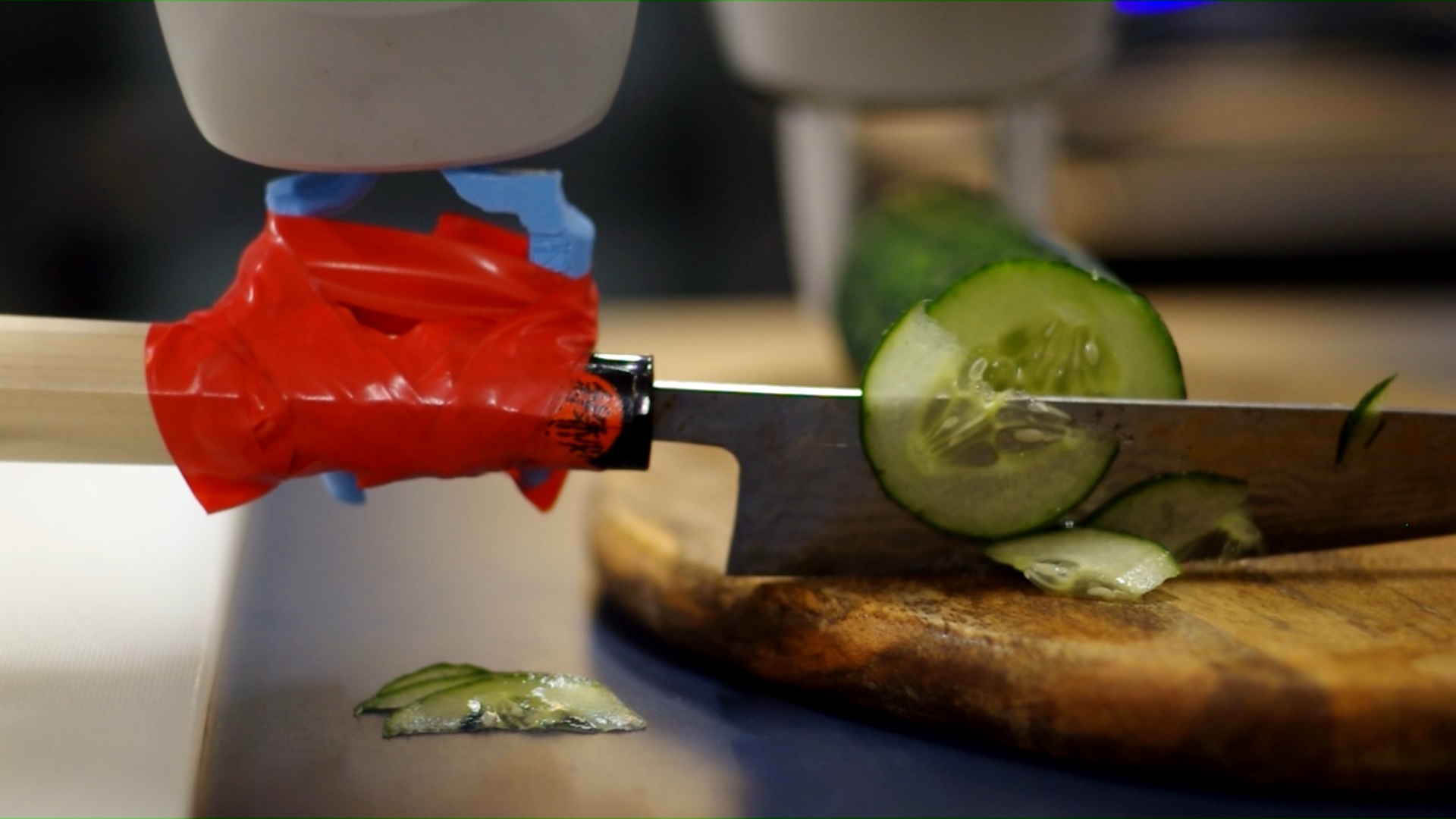
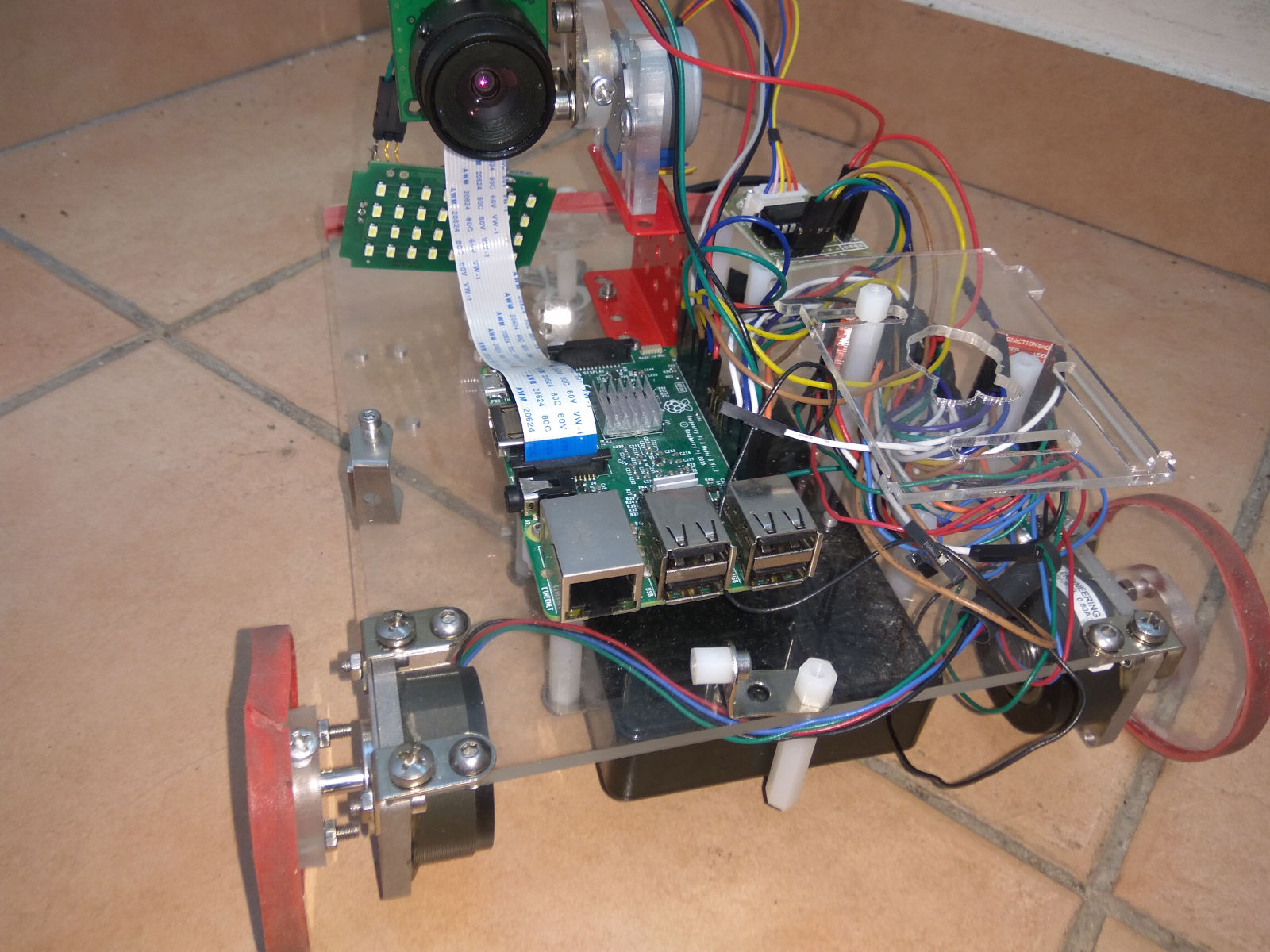
Если раньше цена такой автоматизации была огромной, то сейчас она падает. Становятся доступны более сложные технологические манипуляции. Роборуки — это по сути такой универсальный манипулятор, который не нужно проектировать под каждую задачу, => снижение цены внедрения, ускорение внедрения (хотя роборука может быть дороже чем кусок конвейера, который делает аналогичную операцию).
Но роборука это лишь половина процесса. Вторая половина — научить роборуку думать. И тут до недавних пор ситуация была ужасная. Нет универсальных подходов, которые сможет настроить любой инженер. Надо нанимать программистов/разработчиков/математиков, чтобы они сформулировали проблему, попробовали сделать решение. Конечно, такая ситуация не могла существовать долго. Да и Computer Vision с глубоким обучением подвезли. Так что сейчас начинает появляться какая-то первичная автоматизация не только сторого повторяющихся процессов. Сегодня о ней и поговорим.

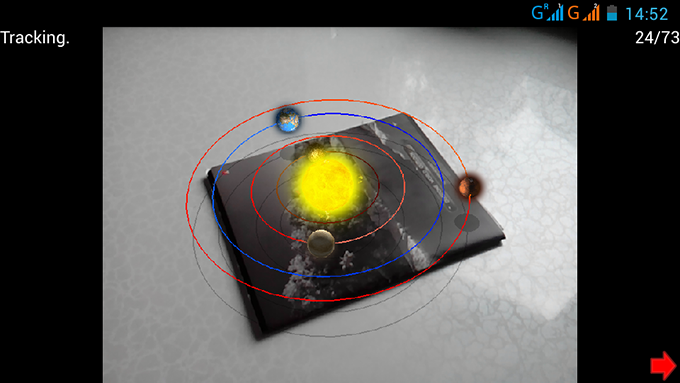
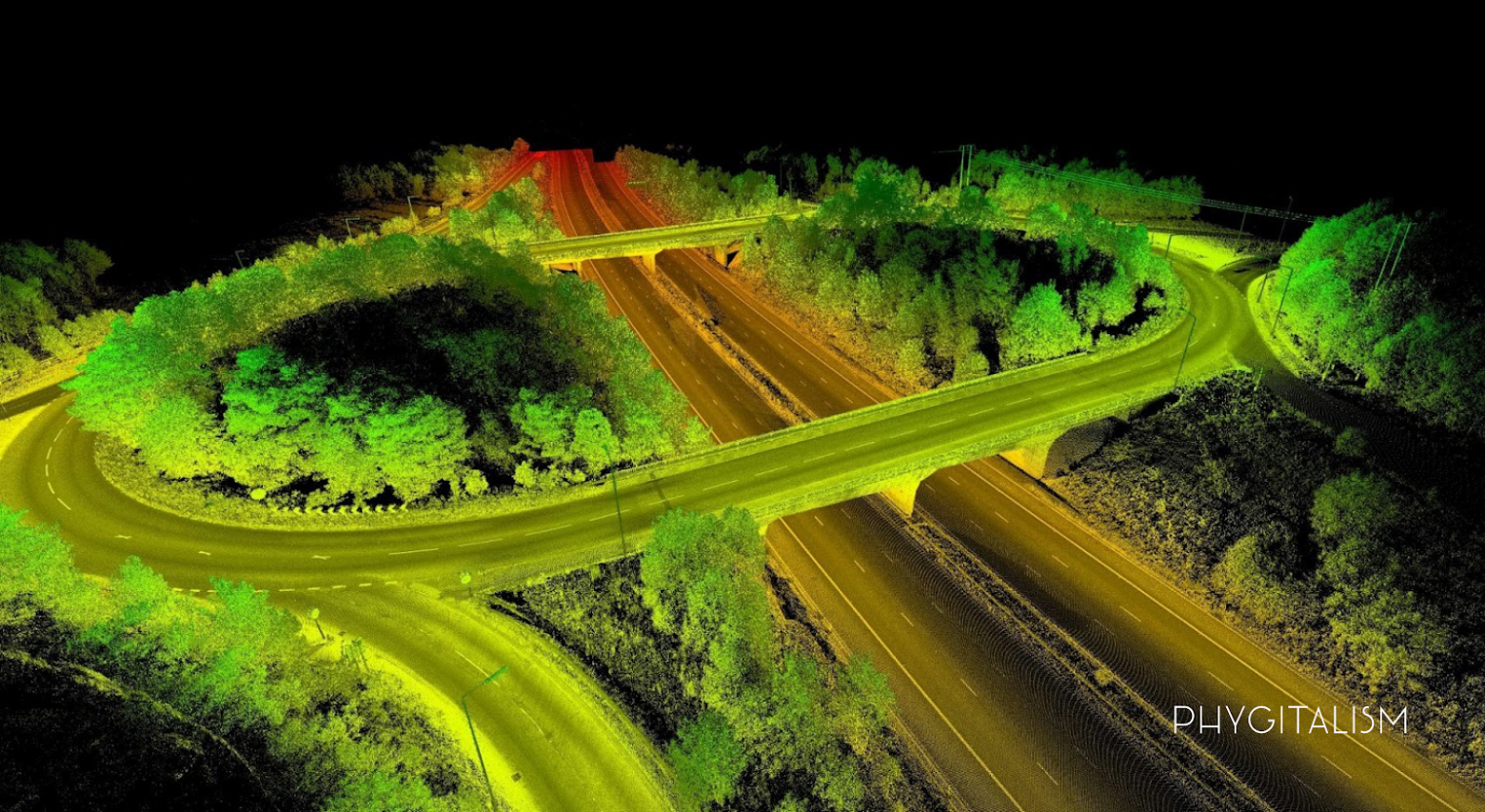
 Хочу рассказать об известном, но мало освещенном в литературе подходе к слежению за множеством движущихся объектов. Сложность этой задачи во многом заключается в том, что алгоритмы обнаружения и выделения объектов часто дают сбои, а сами объекты могут заслоняться другими объектами и элементами фона.
Хочу рассказать об известном, но мало освещенном в литературе подходе к слежению за множеством движущихся объектов. Сложность этой задачи во многом заключается в том, что алгоритмы обнаружения и выделения объектов часто дают сбои, а сами объекты могут заслоняться другими объектами и элементами фона.


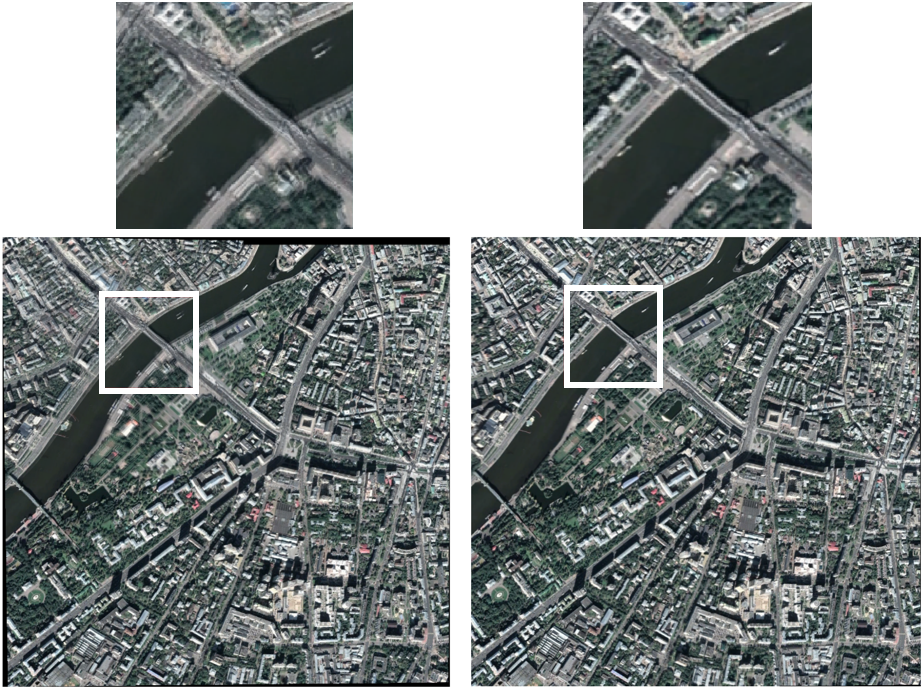
 В настоящей заметке я расскажу о том, как можно построить систему оптического распознавания структурной информации, опираясь на алгоритмы, применяющиеся в обработке изображений и их реализации в рамках библиотеки OpenCV. За описанием системы стоит активно развивающийся open source проект
В настоящей заметке я расскажу о том, как можно построить систему оптического распознавания структурной информации, опираясь на алгоритмы, применяющиеся в обработке изображений и их реализации в рамках библиотеки OpenCV. За описанием системы стоит активно развивающийся open source проект