Комментарии 17
А что если не просто обнулять фотоэлемент, а добавить некий счётчик рядом? Получиться двойной связанный фотоэлемент, способный хранить большие значения пересвета. И теперь если большой фотоэлемент чередовать с обычными фотоэлементами, то получим… точно, Fuji S3/S5.
Мантисса и экспонента ))
Вы могли бы пояснить для тех, кто не разбирается в модельном ряду Fuji — упомянутые вами действительно модели работают лучше, чем предлагаемый концепт modulo camera? Т.е. хранится еще и счетчик?
Если так, то тогда непонятно, в чем революционность решения modulo camera, если подобные вещи не то, что вышли из состояния прототипа, а уже давно коммерчески эксплуатируются.
Если так, то тогда непонятно, в чем революционность решения modulo camera, если подобные вещи не то, что вышли из состояния прототипа, а уже давно коммерчески эксплуатируются.
насколько я понял у fuji всё проще: там 2 вида сенсоров, один более чувствительный, другой менее. Благодаря этому диапазон чувствительности увеличивается. Если провести аналогии как на видео, то у fuji 2 стакана: маленький и большой, а у modulo стакан постоянно опрокидывается. Получается что modulo может обработать абсолютно любые засветки сохраняя адекватные соотношения яркости между соседними пикселями. Однако непонятно как точно восстановить яркости этих «переполненных» пикселей — наверняка как-то отталкивается от «нормальных» незасвеченных пикселей (которые тоже определяются алгоритмически). Так-что потенциальных проблем масса: на «полностью» засвеченной фотографии может будет множество вариантов «восстановленных» снимков и не всегда получится автоматически выбрать лучший вариант. Так же могут быть проблемы с контрастными элементами — подозреваю что алгоритм может решить что внезапная темная область на самом деле засвеченная область.
Итого:
* modulo камера НИКОГДА не будет выдавать «засвеченные» снимки
* fuji s3/s5 — просто имеют расширенный диапазон за счет сенсоров разной чувствительности
* «финальный» снимок в modulo восстанавливается алгоритмически и зависит от «незасвеченных» пикселей, соотношений между яркостями соседей и т.д. — качество снимка зависит исключительно от алгоритма, так-что трудно сказать насколько хороши будут результаты/
вот тут:
web.media.mit.edu/~hangzhao/posters/ICCP15_Poster.pdf
Можно очень хорошо «догадаться» как работает и камера и алгоритм:
* синежелтый график горы высотой от 0 до 1023 режется на сегменты каждые 255 единиц, потом эти сегменты «утапливаются » к нулю. Даже «на глаз» можно понять что порезанную «гору» можно восстановить обратно в цельную с большой точностью. Проблемы начнуться когда в «рельефе» появятся пики (блики), ущелья (темные полоски рисунка, трещины), плато разных высот (границы объектов).
В документе они, кстати, пишут что из пары снимков результаты получаются гораздо проще и лучше и даёт меньше артефактов чем восстановление hdr снимков из нескольких фоток обычных камер
Итого:
* modulo камера НИКОГДА не будет выдавать «засвеченные» снимки
* fuji s3/s5 — просто имеют расширенный диапазон за счет сенсоров разной чувствительности
* «финальный» снимок в modulo восстанавливается алгоритмически и зависит от «незасвеченных» пикселей, соотношений между яркостями соседей и т.д. — качество снимка зависит исключительно от алгоритма, так-что трудно сказать насколько хороши будут результаты/
вот тут:
web.media.mit.edu/~hangzhao/posters/ICCP15_Poster.pdf
Можно очень хорошо «догадаться» как работает и камера и алгоритм:
* синежелтый график горы высотой от 0 до 1023 режется на сегменты каждые 255 единиц, потом эти сегменты «утапливаются » к нулю. Даже «на глаз» можно понять что порезанную «гору» можно восстановить обратно в цельную с большой точностью. Проблемы начнуться когда в «рельефе» появятся пики (блики), ущелья (темные полоски рисунка, трещины), плато разных высот (границы объектов).
В документе они, кстати, пишут что из пары снимков результаты получаются гораздо проще и лучше и даёт меньше артефактов чем восстановление hdr снимков из нескольких фоток обычных камер
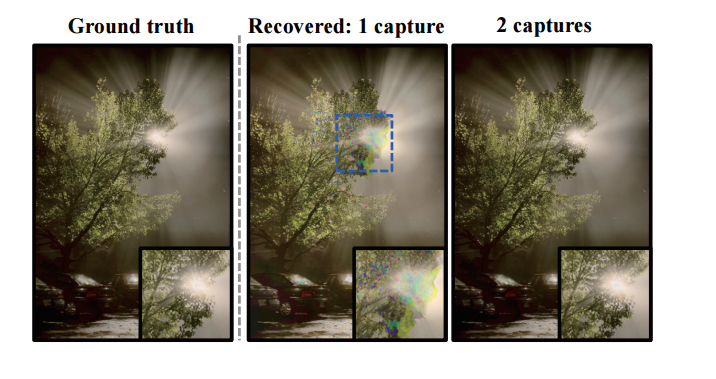
Вот пример проблемной сцены, которую из одного снимка восстановить не получилось, а из двух — нормально:
Искусственный пример, который будет восстановлен некорректно: фотография невосстановленной фотографии.
А ежели сделать modulo camera с пикселями, различающимися по площади в иррациональное число раз, можно будет восстановить вообще всё! И за один снимок.
Читая статью, я сразу подумал про phase unwrapping:

Странно, что для этого термина не нашлось статьи в Википедии.
Зато гугл подсказывает, что алгоритмы 2d phase unwrapping представляют научный интерес. В поиске картинок есть красивые примеры.
В статье, как я понял (пробежавшись глазами по заголовкам), описывается их алгоритм 2dphase image unwrapping.
Странно, что для этого термина не нашлось статьи в Википедии.
Зато гугл подсказывает, что алгоритмы 2d phase unwrapping представляют научный интерес. В поиске картинок есть красивые примеры.
В статье, как я понял (пробежавшись глазами по заголовкам), описывается их алгоритм 2d
а как работает hdr в человеческом глазе?
Медленно и не формируя конечной картинки целиком.
Попробуйте минут 5 смотреть строго в одну точку :-)
за счёт динамического изменения «диафрагмы» ;)
Там каждый «пиксель» изменяет «чувствительность» независимо от остальных.
Когда то же самое научатся делать в матрицах, эпоха ЛДП закончится сама по себе.
Когда то же самое научатся делать в матрицах, эпоха ЛДП закончится сама по себе.
Как я понимаю, получится восстановить если в кадре две разных яркости. То есть с нормально экспонированного участка получаем сигнал N, а с пересвеченного M, который представляет собой M+(max*X). Множитель X неизвестен и его подбираем опытным путем (собственно, этим и занимается софт). Но если у нас в кадре окажутся несколько объектов с кратно различающейся яркостью, то этих множителей может быть несколько для разных областей кадра.
Зарегистрируйтесь на Хабре, чтобы оставить комментарий
Modulo Camera не умеет снимать засвеченные фотографии