Взгляд на ADAS изнутри: когда поедет робот?
16 мин
Сегодня мы хотим рассказать о направлении, с которого мы, Cognitive Pilot, исторически начали свои разработки в области создания беспилотных технологий, а именно отрасли automotive. Вообще эта сфера ставит перед разработчиками беспилотных систем наиболее интересные задачи: на дорогах общего пользования сцены намного сложнее и динамичнее, чем в сельском хозяйстве или на рельсах, а поведение объектов часто почти невозможно предугадать. Для создания беспилотных автомобилей используются технологии глубокого обучения, наиболее сложные нейронные сети и объемные датасеты.
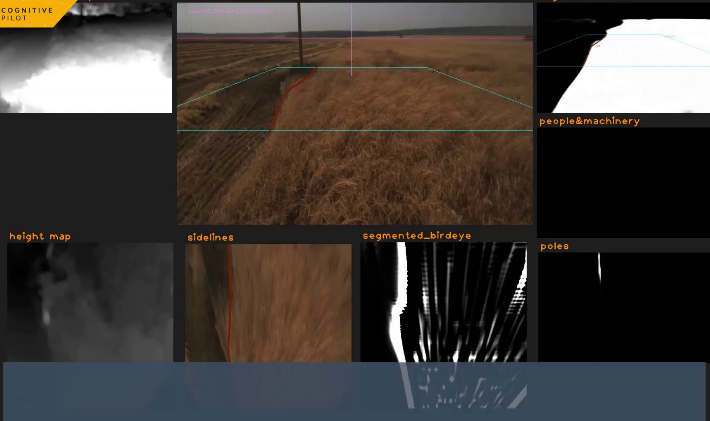
Но вместе с тем не секрет, что промышленное использование беспилотных автомобилей на дорогах общего пользования не разрешено законодателями. И получение санкций на это не стоит ожидать прямо завтра. Участникам рынка еще предстоит решить целый ряд серьезных организационных, юридических, технических и иных проблем. Поэтому мы и выбрали в качестве приоритетных, реальные рынки агро- и рельсового транспорта, на которых наш ИИ может работать и приносить пользу уже сегодня, где, например, комбайнеры уже не касаются руля, сосредоточившись на управлении техпроцессом уборки зерновых, машинисты локомотивов повышают безопасность работы, и где в рамках представленных нами моделей использования автопилотов не нужно ждать разрешения чиновников того или иного уровня.

Но вместе с тем не секрет, что промышленное использование беспилотных автомобилей на дорогах общего пользования не разрешено законодателями. И получение санкций на это не стоит ожидать прямо завтра. Участникам рынка еще предстоит решить целый ряд серьезных организационных, юридических, технических и иных проблем. Поэтому мы и выбрали в качестве приоритетных, реальные рынки агро- и рельсового транспорта, на которых наш ИИ может работать и приносить пользу уже сегодня, где, например, комбайнеры уже не касаются руля, сосредоточившись на управлении техпроцессом уборки зерновых, машинисты локомотивов повышают безопасность работы, и где в рамках представленных нами моделей использования автопилотов не нужно ждать разрешения чиновников того или иного уровня.