
Жители больших городов прекрасно знают, что чистый воздух найти в мегаполисе порой сложнее, чем купить выигрышный билет. Автомобили, заводы, стройки и, конечно же, канализационные очистные сооружения (КОС) вносят свой вклад в спектр малоприятных ароматов, окружающих горожан. Чтобы запах сточных вод не накрыл всех жителей близлежащих районов, на КОС станциях периодически выполняется проверка степени «благоухания». Но она требует сложного и дорогого оборудования. Посему ученые из института биоинженерии Каталонии (Испания) разработали портативное устройство, способное собирать и анализировать состояние атмосферы. Какой принцип работы электронного носа, какие именно данные он может собирать, и как он показал себя на практике? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Те, кому посчастливилось жить недалеко от очистных станций, на своем печальном опыте знают, каково жить в окружении вони, от которой сложно спрятаться. Проблема выделяемых КОС запахов является достаточно распространенной по всему миру. Одним из основных аспектов, который делает ее менее податливой, является отсутствие удобных и эффективных методов количественного определения концентраций запахов на месте и в реальном времени. Своевременный сбор данных позволяет вовремя проводить проверки оборудования, выявлять основные источники запахов и прогнозировать воздействие этих запахов за пределами предприятия.
Однако, когда проверка выполняется классическим методом ольфактометрии, высокая стоимость и непостоянный характер выходных данных приводит к недостаточному количеству измерений, чтобы обеспечить репрезентативную характеристику испускаемых запахов. Кроме того измерения, основанные только на суррогатных параметрах запаха, таких как сероводород (H2S) или аммиак (NH3), часто игнорируют присутствие и взаимодействие различных одорантов в смеси. А это дает неполную картину запахов, т.е. некорректные данные.
Учитывая наличие проблемы и отсутствие адекватных методик ее решения, неудивительно, что научное сообщество начало искать альтернативные варианты. Одним из самых перспективных считаются «электронные носы», также называемые матрицами датчиков или инструментальными системами мониторинга запахов (IOMS от instrumental odor monitoring systems).
Электронный нос — это химико-измерительная система, основанная на множестве химических сенсоров (обычно от 5 до 20 штук) с повышенной чувствительностью к широкому спектру летучих органических соединений (ЛОС) и неорганических газов. Рассматривая смесь запахов в целом, а не отдельные ее компоненты, электронный нос может лучше анализировать концентрацию запаха, чем любой другой инструментальный метод.
Электронные носы уже применялись на практике на объектах самых разных отраслей: очистные сооружения, фермы, заводы по производству компоста, нефтеперерабатывающие заводы и т.д. В этих случаях устройство обычно устанавливалось на выходе из систем контроля запаха (например, дымоходов дезодорации) для контроля их эффективности в режиме реального времени. В редких случаях эти устройства устанавливались на ограждениях вокруг предприятия.
Проблема стационарных электронных носов в том, что они эффективно собирают данные исключительно в одной области, т.е. там, где они установлены. Следовательно, для оценки запахов по всей территории предприятия нужно либо использовать множество таких датчиков, либо сделать датчик портативным.
Однако портативные электронные носы никто не изучал, хотя такое устройство могло бы стать отличной заменой стационарных, так как позволило бы собирать данные с большой площади, а затраты на него были бы в разы меньше, чем затраты на многочисленные стационарные датчики.
Учитывая эти предположения, ученые решили создать электронный нос, прикрепляемый к дрону, и проверить его эффективность на одной из самых больших КОС в Испании (Depuración de Aguas del Mediterráneo). Устройство, получившее броское название RHINOS (от real-time high-speed e-NOSe), способно определять запахи в диапазоне 50-105 ouE/м3.
ouE* — стандартная европейская единица измерения запаха. Значение ouE — это мера массы. 1 ouE — это масса загрязнителя, которая при испарении в 1 м3 не имеющего запаха газа имеет такой же уровень негативного раздражения, как и 1 ou эталонного пахнущего вещества:Кроме того устройство достаточно легкое (1325 г), маломощное (1 Вт) и оснащено GPS-приемником и беспроводной радиосвязью, что позволяет ему работать либо в портативном режиме, либо быть прикрепленным к дрону.
1 ouE/м3 — точка обнаружения;
5 ouE/м3 — легкий запах;
10 ouE/м3 — ярко выраженный запах.
(Источник: «Запах — контроль, моделирование и мониторинг»).
Результаты исследования

Таблица №1: перечень характеристик разработанного электронного носа RHINOS.

Изображение №1: RHINOS (слева) и базовая станция (справа).
RHINOS оснащен 21 газовым сенсором трех вариаций (металлооксидный полупроводник, электрохимические ячейки и недисперсионный инфракрасный датчик / NDIR). Сенсоры нацелены на основные пахучие соединения очистных сооружений: сероводород (H2S), аммиак (NH3), диоксид серы (SO2), тиолы (сернистые аналоги спиртов), амины (производные аммиака), короткоцепочечные жирные кислоты и другие летучие органические соединения (сокращенно ЛОС). Два газа без запаха, такие как двуокись углерода (CO2) и окись углерода (CO), также измеряются из-за их связи с бактериальной активностью и разложением органических отходов.
Параметры окружающей среды, такие как температура, относительная влажность, давление и скорость потока, непрерывно регистрируются внутри сенсорной камеры, чтобы либо компенсировать их влияние на сигналы сенсора (температура и влажность), либо обнаруживать отказы в гидравлической системе (давление и скорость потока).
Также в электронном носе были установлены GPS-приемник, SD-карта для регистрации данных и двухточечная радиосвязь для отправки измеренных данных на удаленную базовую станцию.

Изображение №2: внутренняя архитектура электронного носа состоит из электронной и жидкостной подсистем.
Электронная подсистема основана на архитектуре двойного микроконтроллера (MC от microcontroller), в которой два MC соединены между собой через универсальный асинхронный порт приемника-передатчика (UART от universal asynchronous receiver-transmitter) с использованием конфигурации ведущий-ведомый.
Главный MC управляет электрохимическими датчиками и датчиками NDIR, датчиком температуры, влажности и давления, приемником GPS и радиосвязью.

Таблица №2: характеристики электрохимических датчиков, датчиков NDIR и датчиков окружающей среды.
Каждый датчик подключается к аналоговому входному разъему (AFE от analog front-end), который обеспечивает полное решение пути прохождения сигнала между датчиком и микроконтроллером. Модуль AFE управляет установленным датчиком газа и преобразует аналоговый выходной сигнал (напряжение или ток) в цифровой.
Ведущий MC периодически запрашивает данные у ведомого MC через интерфейс UART, упаковывает полученные данные с собственными данными датчика и местоположением GPS, а затем отправляет их на базовую станцию по радиосвязи.
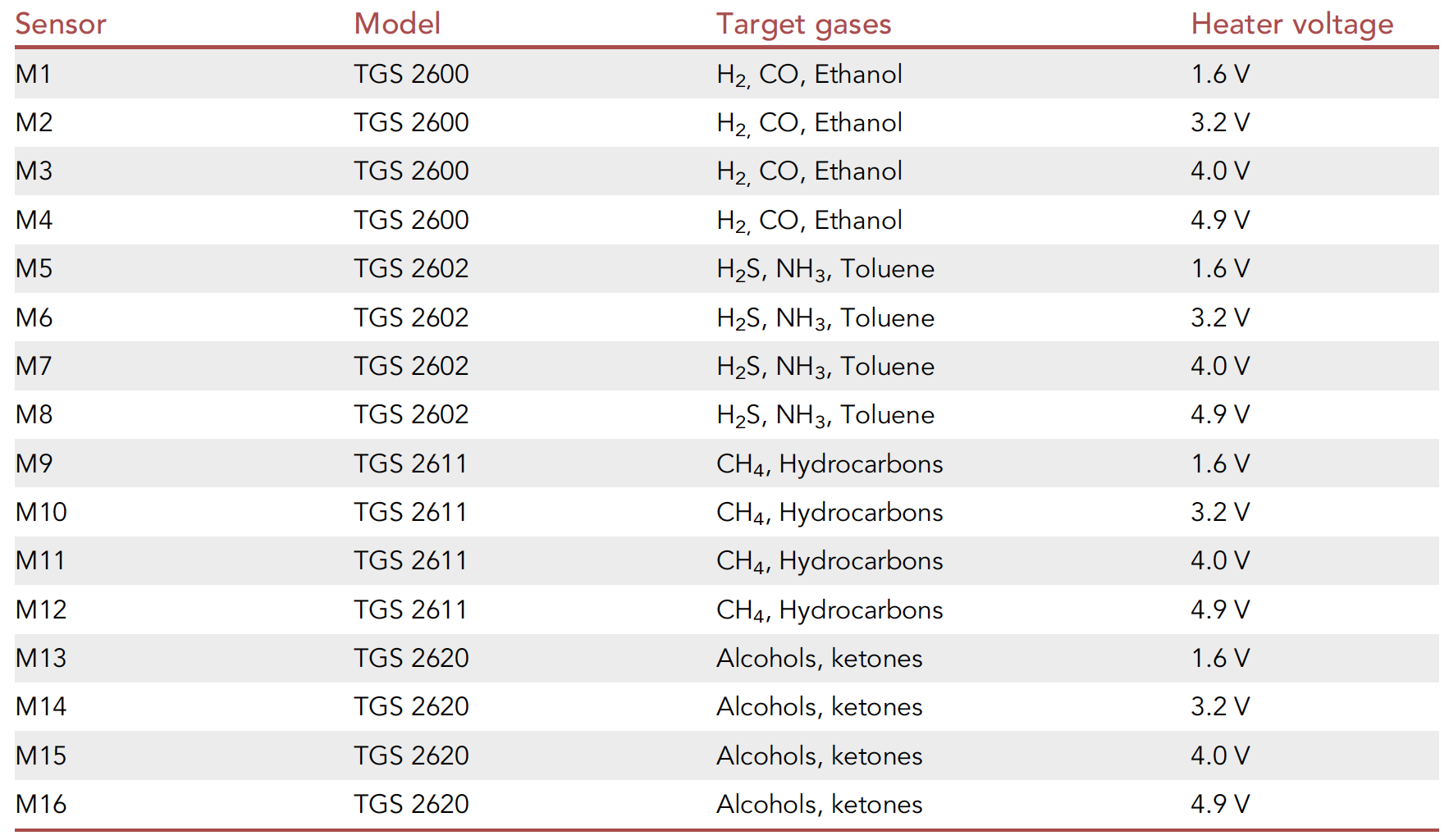
Таблица №3: характеристики датчиков MOX (оксидов металла) на ведомом микроконтроллере.
TGS 2602 обладает высокой чувствительностью к низким концентрациям пахучих газов, таких как NH3 и H2S, которые являются основными маркерами запахов очистных сооружений. TGS 2611 относительно селективен по отношению к метану (CH4) — побочному продукту процессов биологической очистки сточных вод. TGS 2620 обладает высокой чувствительностью к спиртам и парам органических растворителей (например, кетонам), которые могут быть обнаружены в сточных водах фармацевтической, текстильной и лакокрасочной промышленности.
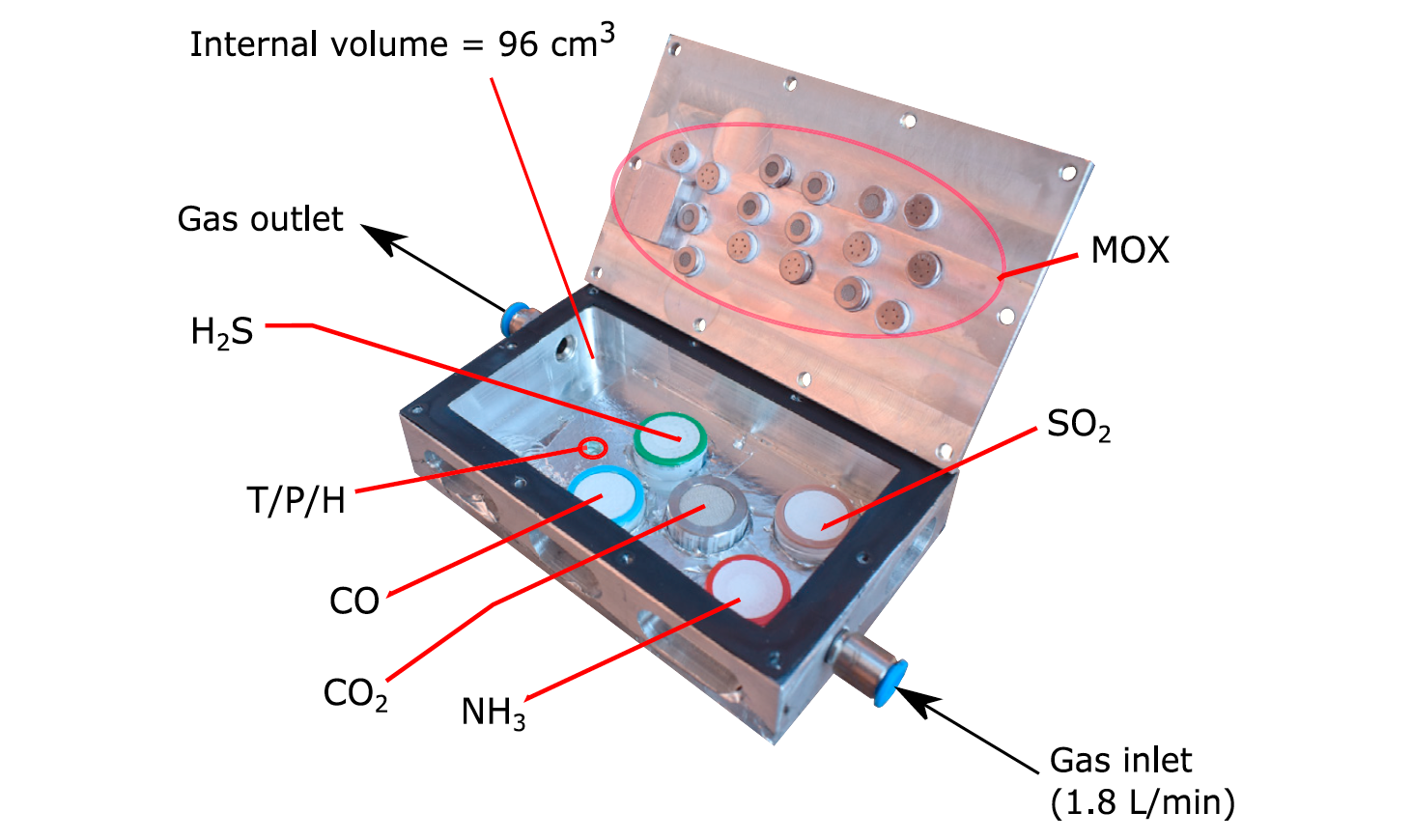
Изображение №3: сенсорная камера RHINOS, содержащая 21 химический датчик, а также датчик температуры, влажности и давления.
Жидкостная подсистема представляет собой алюминиевую камеру (внутренний объем 96 см3), где размещены все датчики. Проба газа попадает в камеру с постоянной скоростью потока 1.8 л/мин с помощью диафрагменного вакуумного микронасоса. Датчики, разъемы и винты покрыты лентой из политетрафторэтилена для герметизации. Стенки камеры были уменьшены до толщины в несколько миллиметров (за исключением винтов и соединителей), что позволило уменьшить вес камеры до < 200 г. Все жидкостные компоненты соединены между собой трубкой из ПТФЭ диаметром 1/80. Цифровой датчик потока, установленный на входе в камеру, непрерывно контролирует расход входящего газового потока, чтобы обнаружить любую потенциальную проблему в гидравлической системе (отказ насоса, утечку газа, засорение трубки и т.д.).
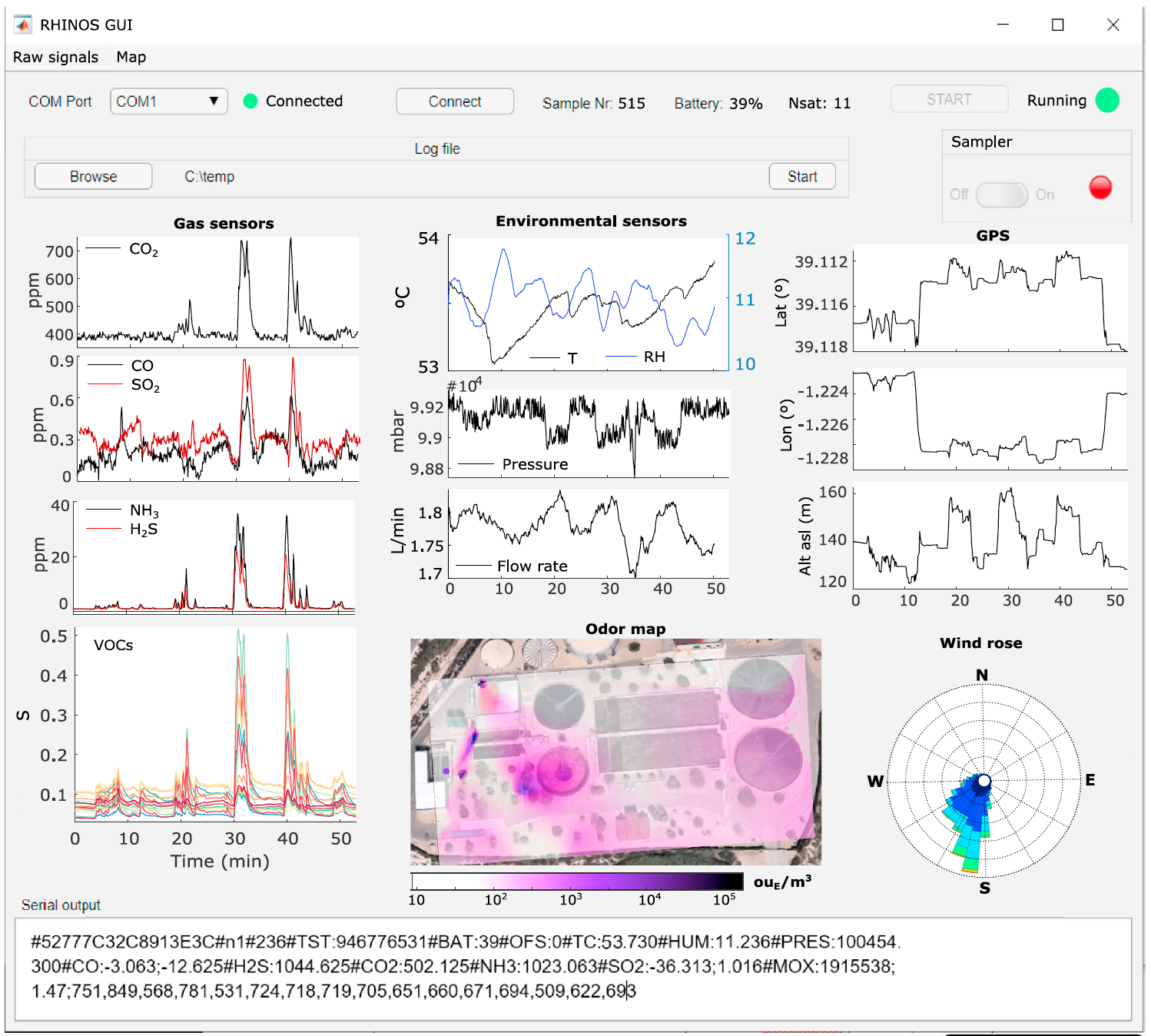
Изображение №4: графический интерфейс пользователя (GUI), работающий на базовой станции.
Роль базовой станции играет ноутбук с USB-антенной и программным обеспечением с графическим пользовательским интерфейсом (GUI). Базовая станция позволяет оператору визуализировать сигналы электронного носа в режиме реального времени, регистрировать измеренные данные и строить диаграммы выходных данных ouE/м3 в виде двумерных карт концентрации запаха. Дополнительно отображается информация о воздушных потоках.
Также имеется возможность отдать дрону команду провести забор воздуха в полимерный пакет для дополнительного ольфактометрического анализа. Это позволяет сравнивать результаты работы электронного носа с более классическим методами, а также калибровать его датчики.
Электронный нос RHINOS был специально разработан так, чтобы его можно было разместить на небольшой дрон. Для этого был разработан специальный монтажный каркас (180 г), позволяющий произвести соединение.

Изображение №5: RHINOS, прикрепленный к дрону DJI Matrice M600.
Когда дрон висит в воздухе, вертикально вниз от него идет 10-метровая трубка из ПТФЭ, позволяющая производить забор без негативного влияния турбулентной зоны пропеллеров дрона.
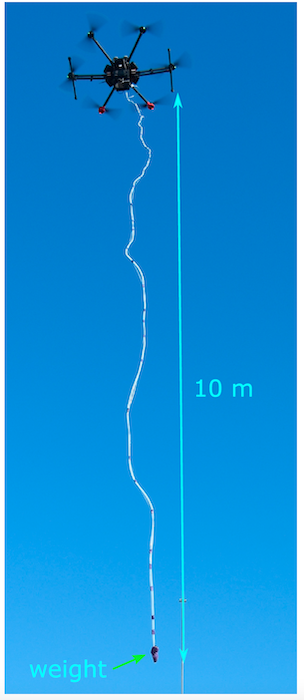
Изображение №6: дрон с RHINOS в полете, оснащенный трубкой для забора воздуха (длина 10 м) и грузиком в 150 г.
Местом проведения практических испытаний стал КОС площадью 35000 м2, обслуживающий порядка 290000 человек. Отбор проб проводился вокруг четырех наиболее проблемных источников запаха, известных руководителям станции: здание предварительной обработки, отстойники, биореакторы и дымоход дезодорации.

Изображение №7: станция очистки сточных вод, использованная во время тестов, и главные источники запаха, отмеченные разными цветами.
В общей сложности в течение 6 месяцев было собрано 31 образец запахов из вышеперечисленных проблемных участков станции.
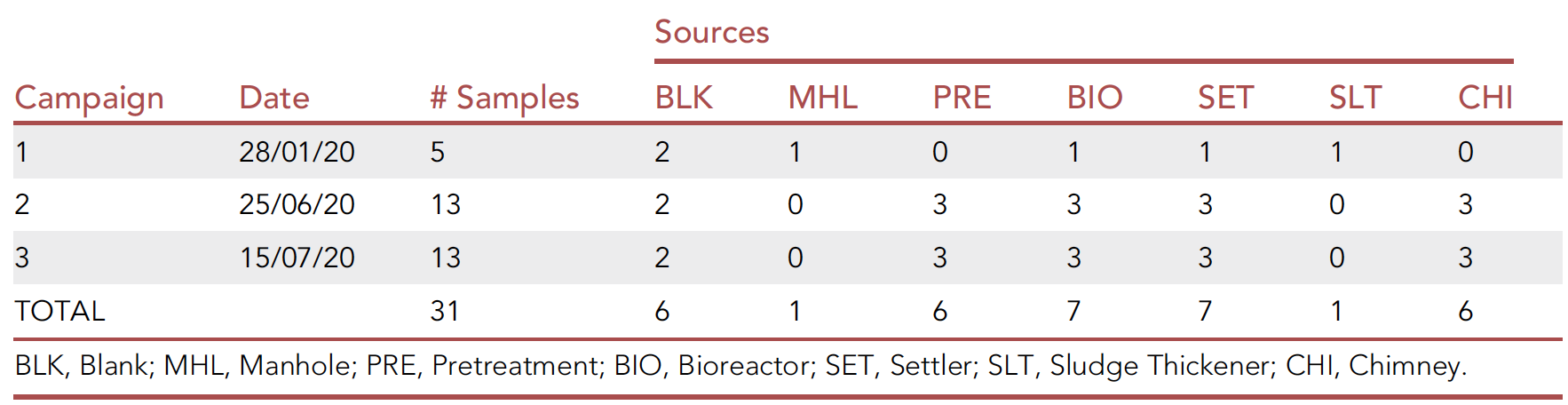
Таблица №4: план забора проб для калибровки и проверки электронного носа.
Пробы из каждого источника отбирались на трех высотах (0.5 м, 2 м и 5 м) с помощью дистанционно управляемого вакуумного пробоотборника (пакет емкостью 10 л). Полученные образцы хранились в непрозрачных контейнерах и отправлялись в сертифицированную лабораторию, где их анализировали методом динамической ольфактометрии.
Результаты тестов
Одним из самых важных параметров работы любой мобильной системы является время отклика. Чем короче это время, тем быстрее датчик может двигаться без ухудшения значений пространственного разрешения измерений. В электронном носу время отклика обычно определяется скоростью заполнения и очистки сенсорной камеры.
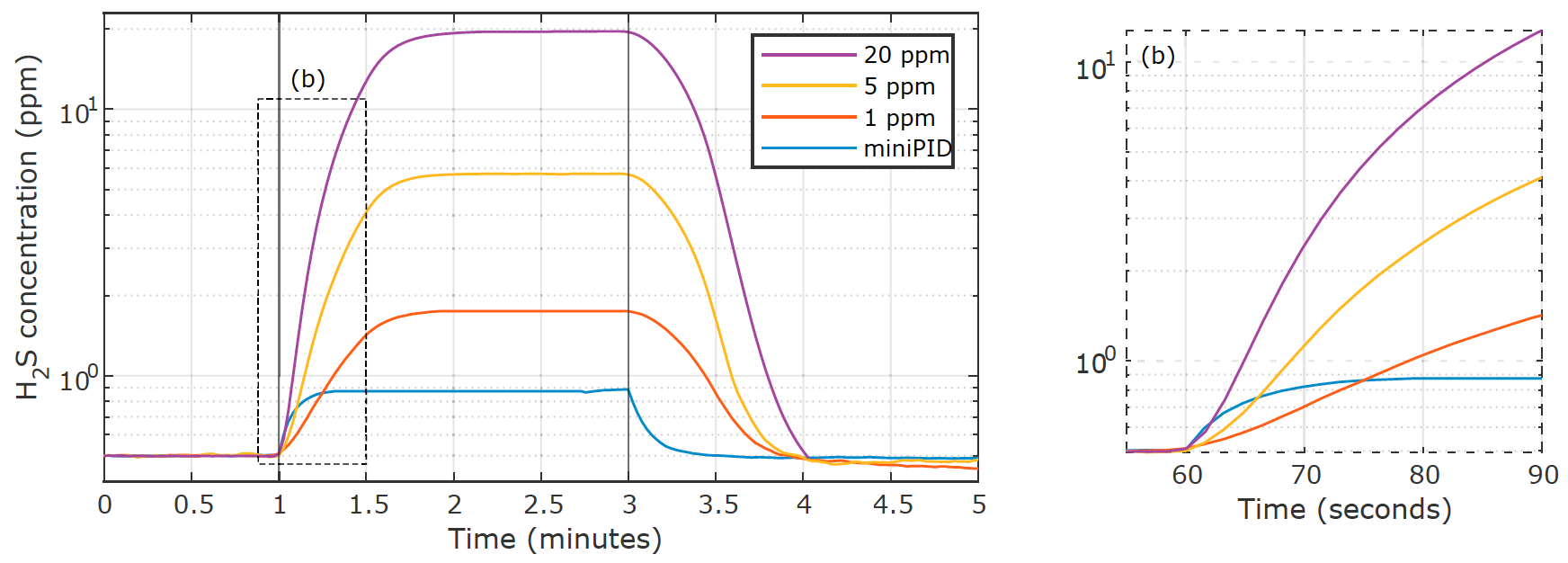
Изображение №8: характеристика времени наполнения и очистки сенсорной камеры.
Судя по данным из графиков выше, время наполнения и очистки составляло 10 секунд. Отклик электрохимического датчика H2S показывает время нарастания в 30 секунд независимо от концентрации запаха и время восстановления от 40 до 60 секунд в зависимости от концентрации газа.
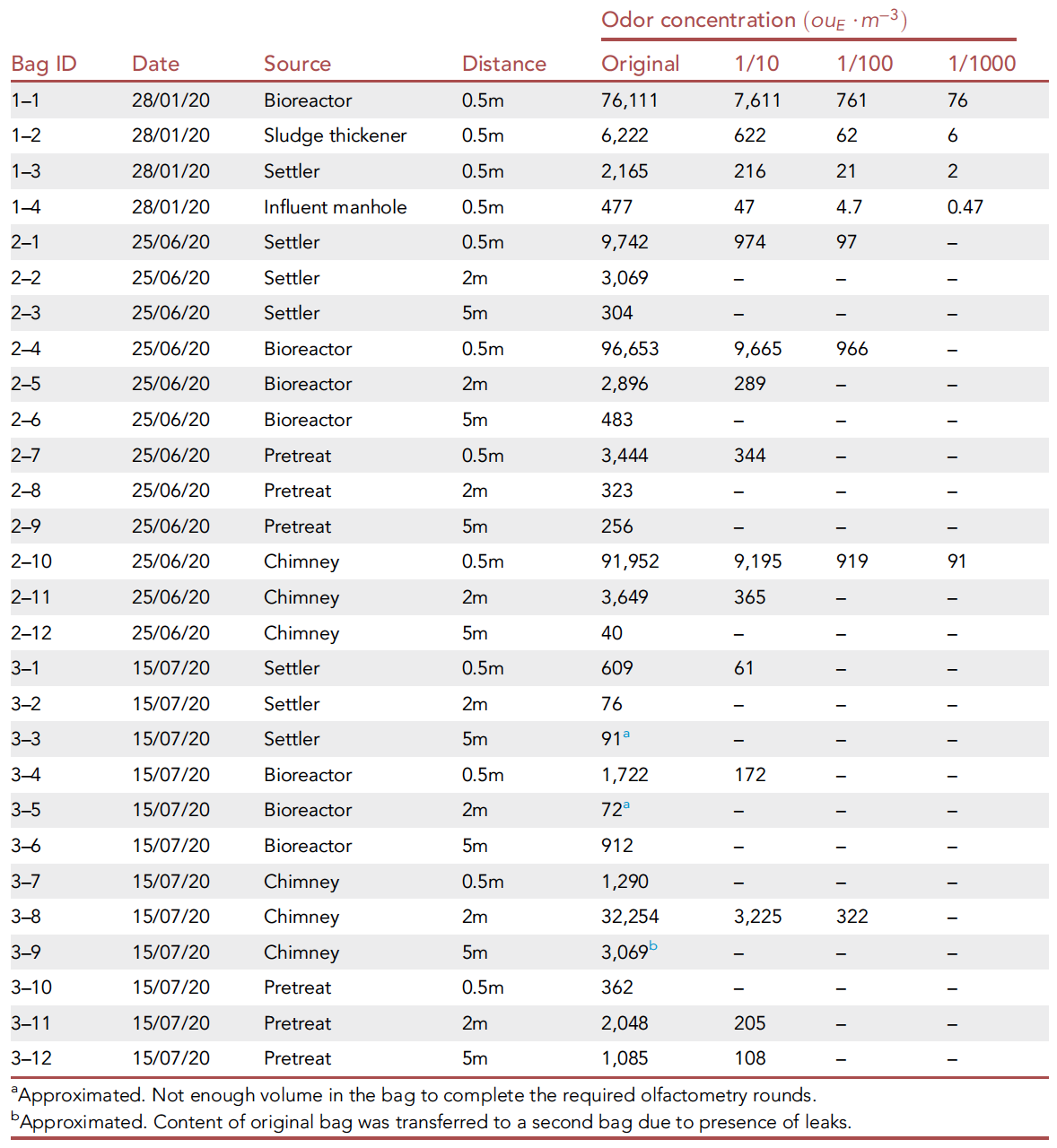
Таблица №5: перечень пакетов с образцами, собранных в три этапа на разных участках станции.
Концентрация запаха варьировалась в зависимости от места и высоты забора: от 40 ouE/м3 (высота 5 м, дезодорирующие трубы) до 96653 ouE/м3 (высота 50 см, биореактор).
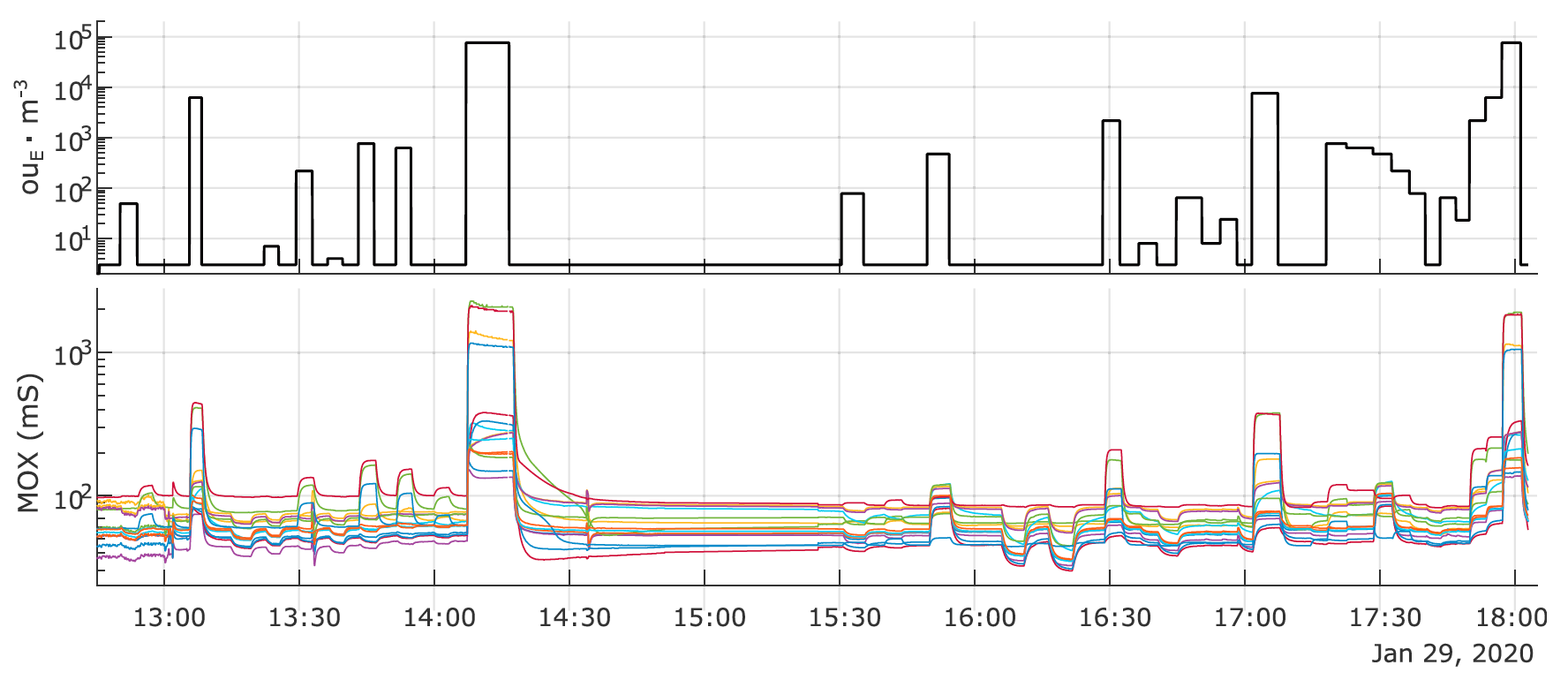
Изображение №9: пример сигналов MOX датчика во время первого калибровочного эксперимента.
Графики выше показывают, что между реакциями сенсора и концентрацией запаха в образцах существует хорошая корреляция. Это подразумевает, что устройство способно достаточно точно определять реальный уровень запаха.
Затем ученые провели сравнение прогнозов электронного носа с результатами ольфактометрии в рамках анализа исключительно H2S.
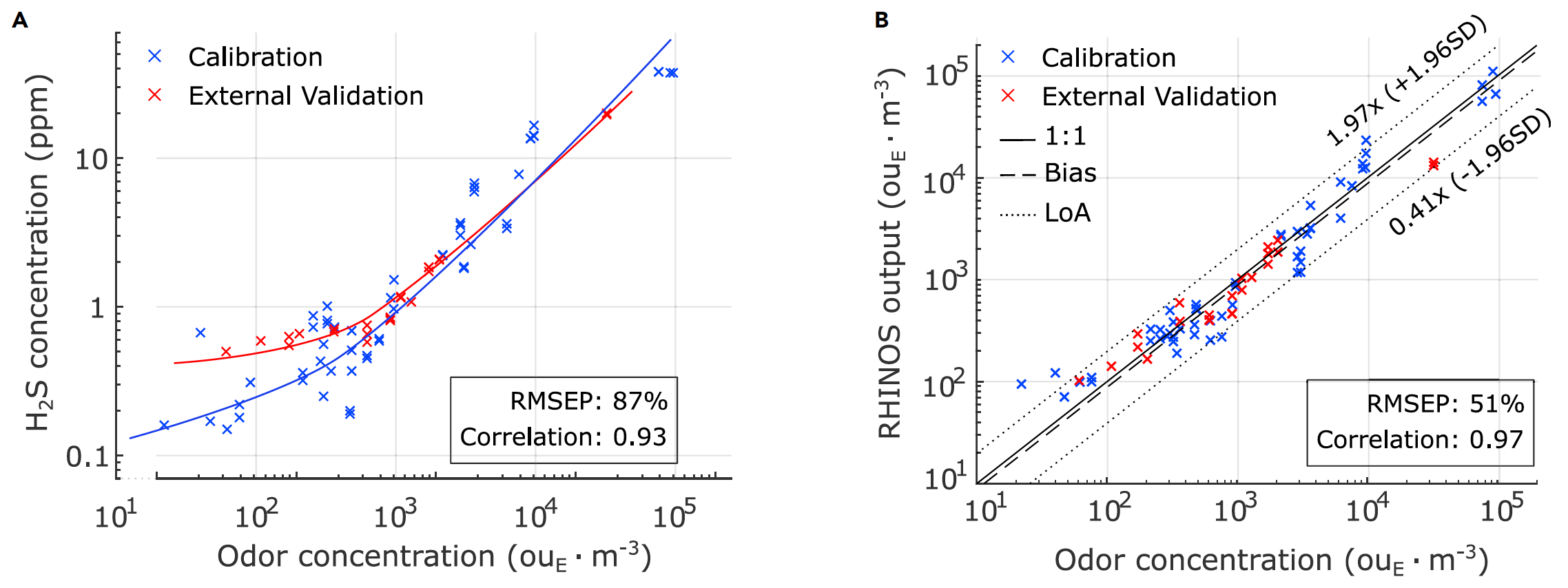
Изображение №10: сравнение RHINOS и ольфактометрии.
Судя по данным сравнительного анализа RHINOS демонстрирует хорошую точность при концентрациях выше 103 ouE/м3, но ниже этого значения его чувствительность снижается. Самые неточные прогнозы наблюдаются при концентрациях ниже 50 ouE/м3. Стоит также учесть, что в наборе датчиков, отвечающих за разные составляющие атмосферы, есть более и менее важные для общего показателя точности прогноза.

Изображение №11: значения VIP для каждого из датчиков.
На графике выше представлены значения VIP (variable importance in prediction), т.е. важность переменной в прогнозе. Ученые считают, что оптимальной комбинацией датчиков для точного прогноза является набор из 4 специфических датчиков (в основном H2S и NH3, затем следуют SO2 и CO2) и подмножества из четырех неспецифических MOX датчиков. Это связано с тем, что МОХ датчики, к примеру, могут компенсировать пониженную чувствительность электрохимических датчиков в диапазоне низких концентраций.

Изображение №12: анализ запахов в реальном времени с помощью RHINOS по сравнению с динамической ольфактометрией.
В ходе третьего этапа практических исследований ученые провели сравнение работы RHINOS с динамической ольфактометрией. В целом оба метода измерения качественно согласуются друг с другом. Корреляция результатов RHINOS и ольфактометрии составила примерно 72%. Другими словами, точность работы электронного носа практически сопоставима с точностью классических методов анализа запахов.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали новый метод анализа запахов. Разработанное устройство прикрепляется к дрону, что позволяет дистанционно анализировать атмосферу в реальном времени и на нескольких участках того или иного предприятия.
Ученые говорят, что им предстоит еще немало работы по совершенствованию их детища, так как на данный момент классическая ольфактометрия пока еще лучше электронного носа. Однако стандартизация процесса (т.е. подбор верной комбинации датчиков), уменьшение веса устройства, снижение воздействия внешних факторов на устройство (температура, давление, влажность) могут повысить его производительность и, соответственно, точность прогнозов.
В любом случае более дешевый, простой и точный метод анализа запахов однозначно будет полезным, особенно если он заставит нерадивых предпринимателей не пренебрегать проверками.
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! :)
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
