Осмысленная визуализация при анализе и проектировании информационных систем
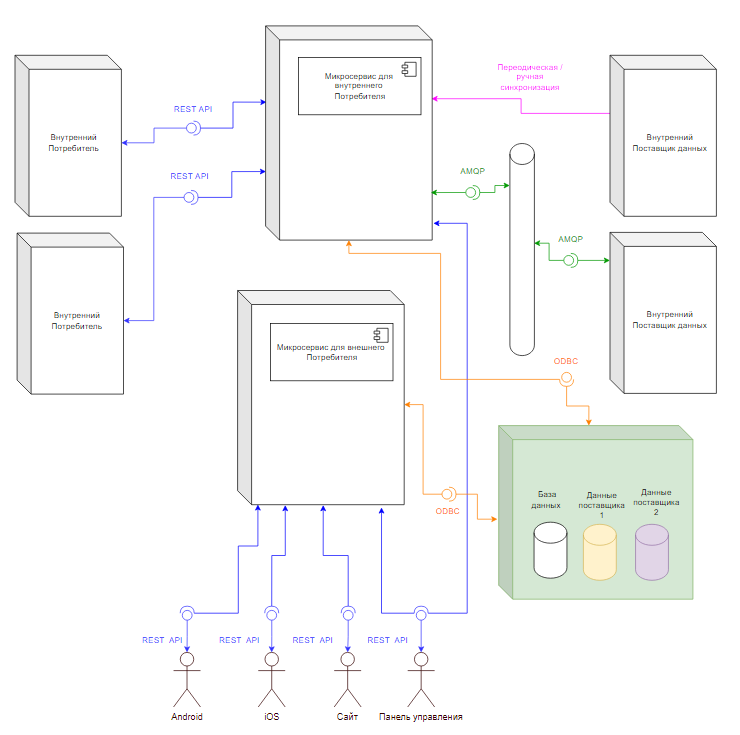
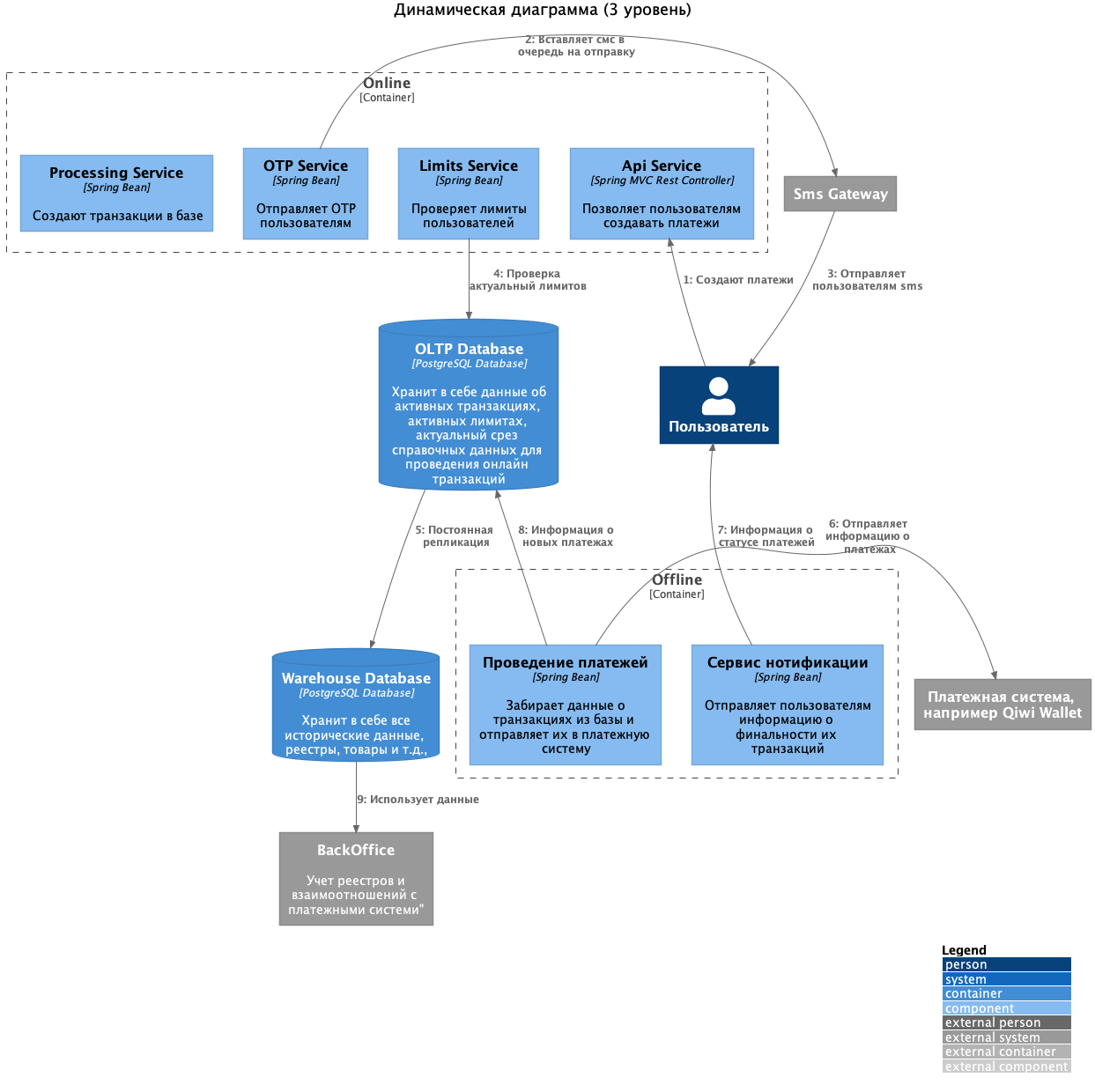
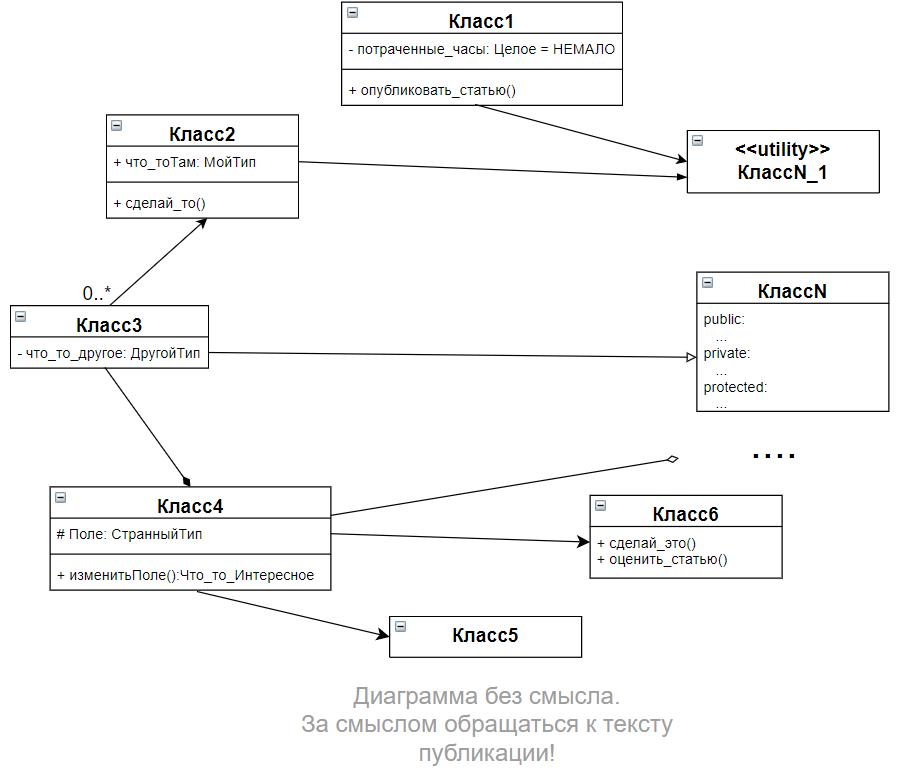
Сегодня, пожалуй, трудно найти IT-специалиста, который в ходе своей деятельности контактировал бы только лишь с текстом. А таблицы, схемы и диаграммы так вообще прочно ассоциируются с работой системного аналитика. Причина этого простая: текст, оставаясь неотъемлемой частью любой документации и её ядром, не всегда может обеспечить полное и ясное представление информации. Он может быть неоднозначным, многословным и трудным для восприятия, и особенно когда речь идёт об описании сложных взаимосвязей и отношений между различными системами и их компонентами.
Означает ли сказанное, что средства визуализации окончательно победили и каждый аналитик твёрдо понимает, как ими пользоваться? Практика показывает, что нет. Выбор того или иного средства визуализации иногда делается неосознанно, вследствие привычки или личных предпочтений. Да и не учитывается, что любой ранее зарекомендовавший себя инструмент при определённых условиях может оказаться неэффективным и даже нанести вред. Но обо всём по порядку.