Машинное зрение — это научное направление в области искусственного интеллекта, в частности робототехники, и связанные с ним технологии получения изображений объектов реального мира, их обработки и использования полученных данных для решения разного рода прикладных задач без участия (полного или частичного) человека.

Обработка изображений и анализ изображений в основном сосредоточены на работе с 2D изображениями, т.е. как преобразовать одно изображение в другое. Например, попиксельные операции увеличения контрастности, операции по выделению краёв, устранению шумов или геометрические преобразования, такие как вращение изображения. Данные операции предполагают, что обработка/анализ изображения действуют независимо от содержания самих изображений.
Компьютерное зрение сосредотачивается на обработке трехмерных сцен, спроектированных на одно или несколько изображений. Например, восстановлением структуры или другой информации о 3D сцене по одному или нескольким изображениям. Компьютерное зрение часто зависит от более или менее сложных допущений относительно того, что представлено на изображениях.
Также существует область названная визуализация, которая первоначально была связана с процессом создания изображений, но иногда имела дело с обработкой и анализом. Например, рентгенография работает с анализом видеоданных медицинского применения.
Наконец, распознавание образов является областью, которая использует различные методы для получения информации из видеоданных, в основном, основанные на статистическом подходе. Значительная часть этой области посвящена практическому применению этих методов.
Таким образом, можно сделать вывод, что понятие «машинное зрение» на сегодняшний день включает в себя: компьютерное зрение, распознавание зрительных образов, анализ и обработка изображений и т.д.

Классическая задача в компьютерном зрении, обработке изображений и машинном зрении это определение содержат ли видеоданные некоторый характерный объект, особенность или активность.
Эта задача может быть достоверно и легко решена человеком, но до сих пор не решена удовлетворительно в компьютерном зрении в общем случае: случайные объекты в случайных ситуациях.
Один или несколько предварительно заданных или изученных объектов или классов объектов могут быть распознаны (обычно вместе с их двухмерным положением на изображении или трехмерным положением в сцене).

Распознается индивидуальный экземпляр объекта принадлежащего к какому-либо классу.
Примеры: идентификация определённого человеческого лица или отпечатка пальцев или автомобиля.

Видеоданные проверяются на наличие определенного условия.
Обнаружение, основанное на относительно простых и быстрых вычислениях иногда используется для нахождения небольших участков в анализируемом изображении, которые затем анализируются с помощью приемов, более требовательных к ресурсам, для получения правильной интерпретации.

Поиск изображений по содержанию: нахождение всех изображений в большом наборе изображений, которые имеют определенное различными путями содержание.
Оценка положения: определение положения или ориентации определенного объекта относительно камеры.
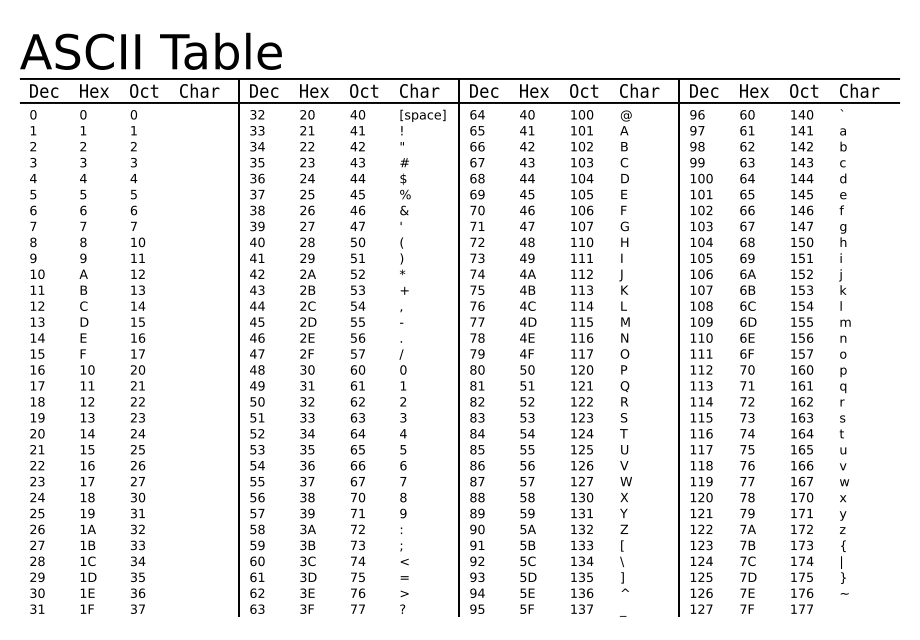
Оптическое распознавание знаков: распознавание символов на изображениях печатного или рукописного текста (обычно для перевода в текстовый формат, наиболее удобный для редактирования или индексации. Например, ASCII).
Восстановление 3D формы по 2D изображениям осуществляется с помощью стереореконструкции карты глубины, реконструкции поля нормалей и карты глубины по закраске полутонового изображения, реконструкции карты глубины по текстуре и определения формы по перемещению
Пример восстановления 3D формы по 2D изображеню

Несколько задач, связанных с оценкой движения, в которых последовательность изображений (видеоданные) обрабатываются для нахождения оценки скорости каждой точки изображения или 3D сцены. Примерами таких задач являются: определение трехмерного движения камеры, слежение, то есть следование за перемещениями объекта (например, машин или людей)
Даны два или больше изображения сцены, или видеоданные. Восстановление сцены имеет задачей воссоздать трехмерную модель сцены. В простейшем случае, моделью может быть набор точек трехмерного пространства. Более сложные методы воспроизводят полную трехмерную модель.

Задача восстановления изображений это удаление шума (шум датчика, размытость движущегося объекта и т.д.).
Наиболее простым подходом к решению этой задачи являются различные типы фильтров, таких как фильтры нижних или средних частот.
Более высокий уровень удаления шумов достигается в ходе первоначального анализа видеоданных на наличие различных структур, таких как линии или границы, а затем управления процессом фильтрации на основе этих данных.
Анализ оптического потока (нахождения перемещения пикселей между двумя изображениями).
Несколько задач, связанных с оценкой движения, в которых последовательность изображений (видеоданные) обрабатываются для нахождения оценки скорости каждой точки изображения или 3D сцены.
Примерами таких задач являются: определение трехмерного движения камеры, слежение, т.е. следование за перемещениями объекта (например, машин или людей).
Подсчитывает количество светлых или темных пикселей.
С помощью счетчика пикселей пользователь может выделить на экране прямоугольную область в интересующем месте, например там, где он ожидает увидеть лица проходящих людей. Камера в ответ немедленно даст сведения о количестве пикселей, представленных сторонами прямоугольника.
Счетчик пикселей дает возможность быстро проверить, соответствует ли смонтированная камера нормативным требованиям или требованиям заказчика относительно пиксельного разрешения, например, для лиц людей, входящих в двери, которые контролируются камерой, или в целях распознавания номерных знаков.
Преобразует изображение в серых тонах в бинарное (белые и черные пиксели).
Значения каждого пикселя условно кодируются, как «0» и «1». Значение «0» условно называют задним планом или фоном а «1» — передним планом.
Часто при хранении цифровых бинарных изображений применяется битовая карта, где используют один бит информации для представления одного пикселя.
Также, особенно на ранних этапах развития техники, двумя возможными цветами были чёрный и белый, что не является обязательным.
Используется для поиска и (или) подсчета деталей.
Цель сегментации заключается в упрощении и/или изменении представления изображения, чтобы его было проще и легче анализировать.
Сегментация изображений обычно используется для того, чтобы выделить объекты и границы (линии, кривые, и т. д.) на изображениях. Более точно, сегментация изображений — это процесс присвоения таких меток каждому пикселю изображения, что пиксели с одинаковыми метками имеют общие визуальные характеристики.
Результатом сегментации изображения является множество сегментов, которые вместе покрывают всё изображение, или множество контуров, выделенных из изображения. Все пиксели в сегменте похожи по некоторой характеристике или вычисленному свойству, например, по цвету, яркости или текстуре. Соседние сегменты значительно отличаются по этой характеристике.

Штрих-код — графическая информация, наносимая на поверхность, маркировку или упаковку изделий, представляющая возможность считывания её техническими средствами — последовательность чёрных и белых полос либо других геометрических фигур.
В машинном зрении штрих-коды используют для декодирования 1D и 2D кодов, разработанных для считывания или сканирования машинами.
Оптическое распознавание символов: автоматизированное чтение текста, например, серийных номеров.
Распознавание используется для конвертации книг и документов в электронный вид, для автоматизации систем учёта в бизнесе или для публикации текста на веб-странице.
Оптическое распознавание текста позволяет редактировать текст, осуществлять поиск слов или фраз, хранить его в более компактной форме, демонстрировать или распечатывать материал, не теряя качества, анализировать информацию, а также применять к тексту электронный перевод, форматирование или преобразование в речь.
Использовано компьютерное зрение для неразрушающего контроля качества сверхпроводящих материалов.
Введение. Решение задач обеспечения комплексной безопасности (как антитеррористической и механической безопасности объектов, так и технологической безопасности инженерных систем), в настоящее время, требует системной организации контроля, текущего состояния объектов. Одними из наиболее перспективных способов контроля текущего состояния объектов являются оптические и оптико-электронные методы, основанные на технологиях обработки видеоизображений оптического источника. К ним относятся: программы по работе с изображениями; новейшие способы обработки изображений; оборудования для получения, анализа и обработки изображений, т.е. комплекс средств и методов относящихся к области компьютерного и машинного зрения. Компьютерное зрение — это общий набор методов, позволяющих компьютерам видеть и распознавать трех- или двухмерные объекты, как инженерного направления, так и нет. Для работы с компьютерным зрение требуются цифровые или аналоговые устройства ввода-вывода, а также вычислительные сети и IP анализаторы локаций, предназначенные для контроля производственного процесса и подготовки информации для принятия оперативных решений в кратчайшие сроки.
Постановка проблемы. На сегодняшний день, главной задачей для проектируемых комплексов машинного зрения остаётся обнаружение, распознавание, идентификация и квалификация объектов потенциального риска, находящихся в случайном месте в зоне оперативной ответственности комплекса. Существующие на данный момент программные продукты, направленные на решение перечисленных задач обладают рядом существенных недостатков, а именно: значительная сложность, связанная с высокой детализацией оптических образов; высокая потребляемая мощность и достаточно узкий спектр возможностей. Расширение задач обнаружения объектов потенциального риска, до области поиска случайных объектов в случайных ситуациях, находящихся в случайном месте, имеющимися программными продуктами не возможно, даже с задействованием суперкомпьютера.
Цель. Разработка универсальной программы обработки изображений оптического источника, с возможностью потокового анализа данных, то есть программа должна быть лёгкой и быстрой для того, чтобы её можно было записать на малогабаритное ЭВМ устройство.
Задачи:
Актуальность программы определяется:
Анализ актуальности разработки программы.
Для упрощения решения задач данного типа, мною была разработана математическая модель и написана программа для ЭВМ устройства по анализу изображения при помощи простейших преобразований исходных изображений.
Программа работает с преобразованиями типа бинаризации, яркости, контраста изображения и т.д. Принцип действия программы продемонстрирован на примере анализа сверхпроводящих материалов.
При создании композиционных сверхпроводников на основе Nb3Sn варьируется объемное соотношение бронзы и ниобия, размер и количество волокон в нем, равномерность их распределения по сечению бронзовой матрицы, наличие диффузионных барьеров и стабилизирующих материалов. При заданной объемной доле ниобия в проводнике увеличение количества волокон приводит, соответственно, к уменьшению их диаметра. Это ведет к заметному возрастанию поверхности взаимодействия Nb / Cu-Sn, что в значительной степени ускоряет процесс нарастания сверхпроводящей фазы. Такое увеличение количества сверхпроводящей фазы при повышении числа волокон в проводнике обеспечивает возрастание критических характеристик сверхпроводника. В связи с этим необходимо наличие инструмента для контроля объемной доли сверхпроводящей фазы в конечном продукте (композиционном сверхпроводнике).
При создании программы учитывалась важность проведения исследований материалов, из которых создаётся сверхпроводящие кабели, так как при неправильном соотношении ниобия к бронзе возможен взрыв проводов, а, следовательно, людские жертвы, денежные затраты и потеря времени. Данная программа позволяет определить качество проводов на основе химическо физического анализа объекта.
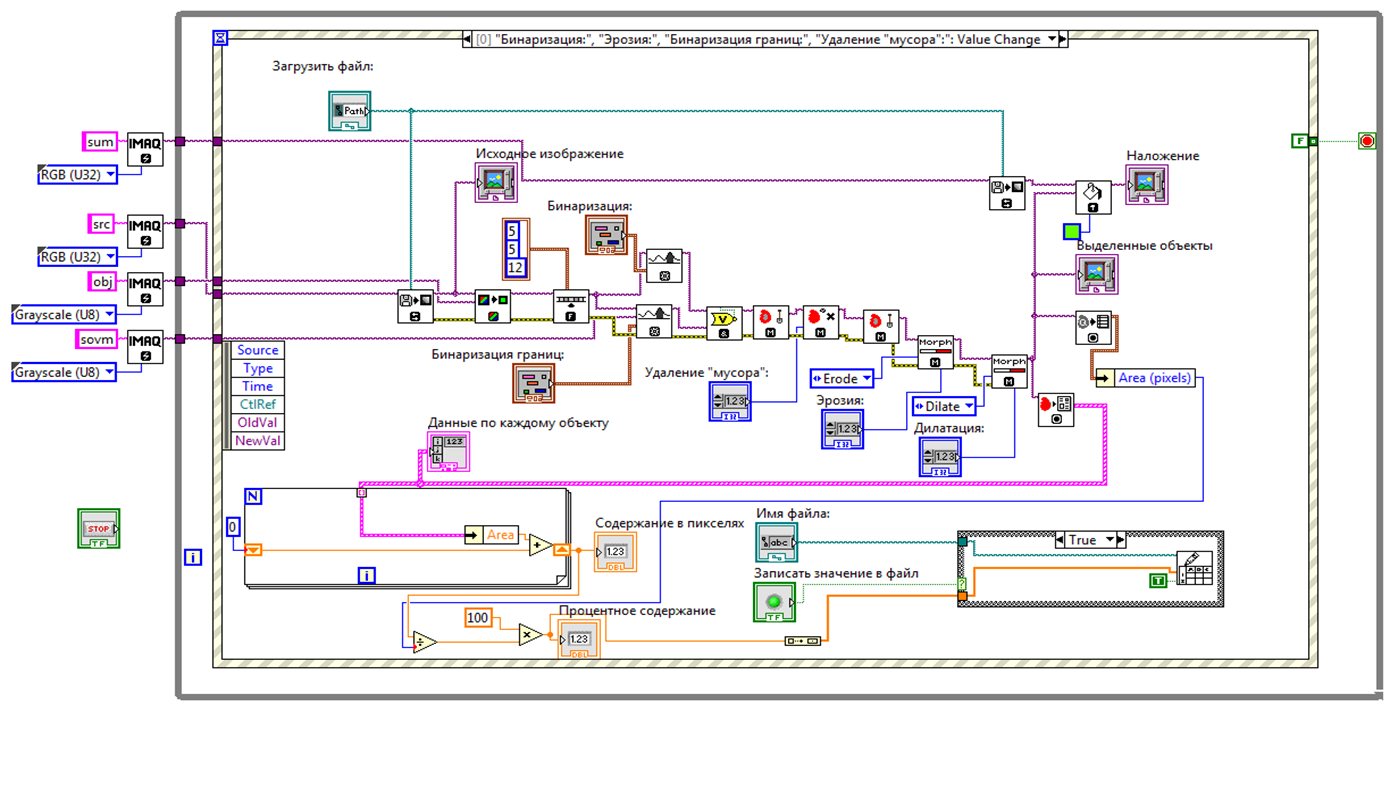
Блок-диаграмма программы
Описание этапов исследования.
1 этап. Пробоподготовка: резка композиционного сверхпроводника на электроэрозионном станке; запрессовка образца в пластмассовую матрицу; полировка образца до зеркального состояния; травление образца для выделения волокон ниобия на бронзовой матрице. Получены образцы запрессованных композиционных сверхпроводниковых образцов;
2 этап. Получение изображений: получение металлографических изображений на сканирующем электронном микроскопе.
3 этап. Обработка изображений: создание инструмента для определения объемной доли сверхпроводящей фазы на металлографическом изображении; набор статистически значимых данных на конкретном типе образцов. Созданы математические модели различных инструментов по обработке изображений; создана программная разработка для оценки объемной доли сверхпроводящий фазы; программа была облегчена путём соединения нескольких математических функций в одну; было получено среднее значение объемной доли волокон ниобия в бронзовой матрице 24.7±0,1 %. Низкий процент отклонения свидетельствует о высокой повторяемости структуры композиционного провода.
Электронномикроскопическое изображения композиционных сверхпроводников

Методы обработки изображений в программе.
Формулы работы программы
Формула бинаризации (метод Оцу):

Формула эрозии:
Формула дилатации:
Схема дилатации и эрозии

Формулы сегментации порогами цвета:
Определение модуля градиента яркости для каждого пикселя изображения:
Вычисление порога:
Использованное оборудование
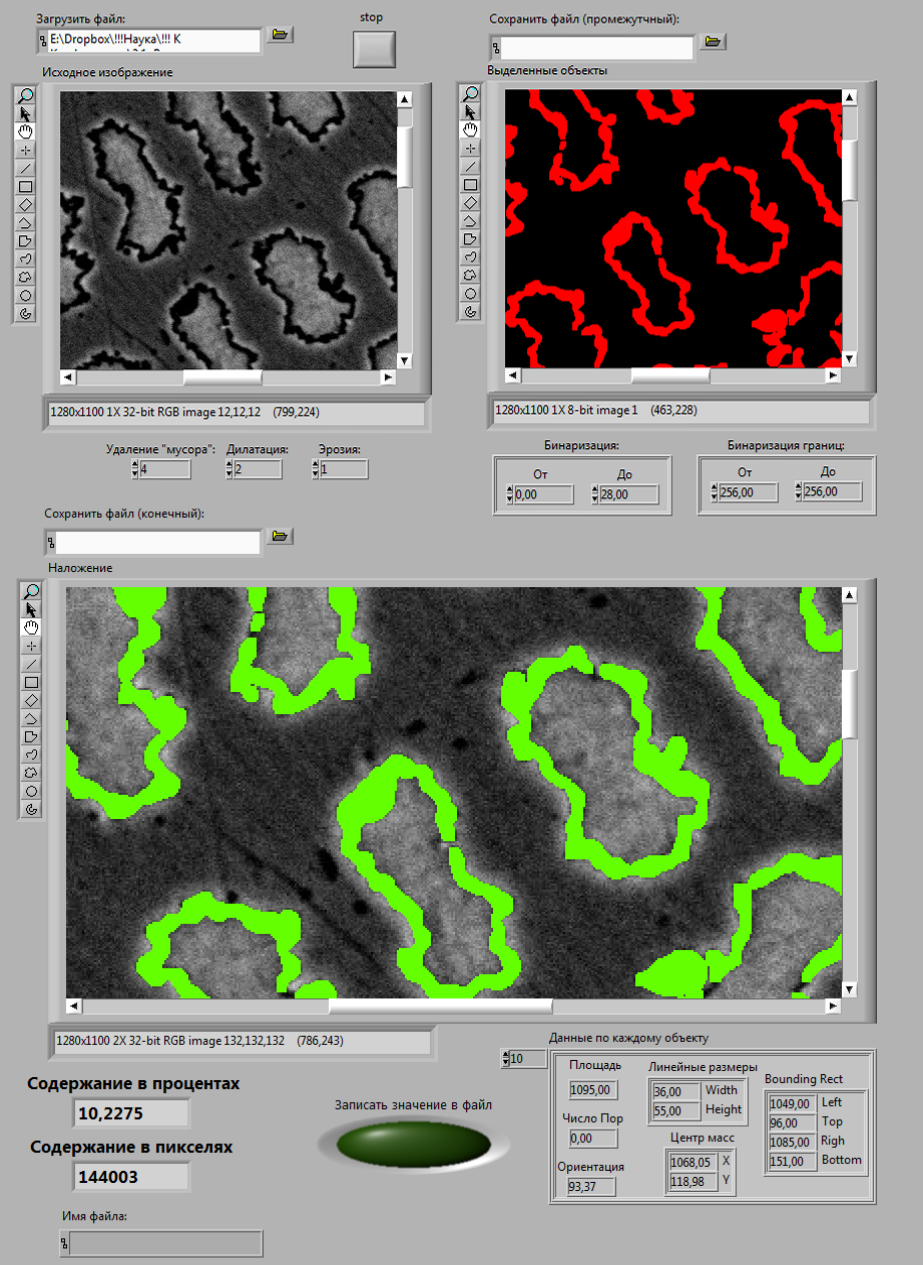
Интерфейс программы
Исторические прорывы в машинном зрении
- 1955 год – Оливер Селфридж. Статья «Глаза и уши компьютера».
- 1958 год – Фрэнк Розенблатт. Компьютерная реализация персептрона.
- 1960-е годы – первые системы обработки изображений.
- 1970-е годы – Лавренсе Робертс. Концепция машинного построения трёхмерных образов объектов.
- 1979 год – Ганс-Хельмут Нагель. Теория анализа динамических сцен.
- 1990-е годы – Первые беспилотные системы управления автотранспортом.
- 2003 год – Корпоративные системы распознавания лиц.
Компоненты системы машинного зрения
Машинное зрение сосредотачивается на применении, в основном промышленном, например, автономные роботы и системы визуальной проверки и измерений. Это значит, что технологии датчиков изображения и теории управления связаны с обработкой видеоданных для управления роботом и обработка полученных данных в реальном времени осуществляется программно или аппаратно.
- Одна или несколько цифровых или аналоговых камер (черно-белые или цветные) с подходящей оптикой для получения изображений
- Программное обеспечение для изготовления изображений для обработки. Для аналоговых камер это оцифровщик изображений
- Процессор (современный ПК c многоядерным процессором или встроенный процессор, например — ЦСП)
- Программное обеспечение машинного зрения, которое предоставляет инструменты для разработки отдельных приложений программного обеспечения.
- Оборудование ввода-вывода или каналы связи для доклада о полученных результатах
- Умная камера: одно устройство, которое включает в себя все вышеперечисленные пункты.
- Очень специализированные источники света (светодиоды, люминесцентные и галогенные лампы и т. д.)
- Специфичные приложения программного обеспечения для обработки изображений и обнаружения соответствующих свойств.
- Датчик для синхронизации частей обнаружения (часто оптический или магнитный датчик) для захвата и обработки изображений.
- Приводы определенной формы используемые для сортировки или отбрасывания бракованных деталей.
Обработка изображений и анализ изображений в основном сосредоточены на работе с 2D изображениями, т.е. как преобразовать одно изображение в другое. Например, попиксельные операции увеличения контрастности, операции по выделению краёв, устранению шумов или геометрические преобразования, такие как вращение изображения. Данные операции предполагают, что обработка/анализ изображения действуют независимо от содержания самих изображений.
Компьютерное зрение сосредотачивается на обработке трехмерных сцен, спроектированных на одно или несколько изображений. Например, восстановлением структуры или другой информации о 3D сцене по одному или нескольким изображениям. Компьютерное зрение часто зависит от более или менее сложных допущений относительно того, что представлено на изображениях.
Также существует область названная визуализация, которая первоначально была связана с процессом создания изображений, но иногда имела дело с обработкой и анализом. Например, рентгенография работает с анализом видеоданных медицинского применения.
Наконец, распознавание образов является областью, которая использует различные методы для получения информации из видеоданных, в основном, основанные на статистическом подходе. Значительная часть этой области посвящена практическому применению этих методов.
Таким образом, можно сделать вывод, что понятие «машинное зрение» на сегодняшний день включает в себя: компьютерное зрение, распознавание зрительных образов, анализ и обработка изображений и т.д.
Задачи машинного зрения
- Распознавание
- Идентификация
- Обнаружение
- Распознавание текста
- Восстановление 3D формы по 2D изображениям
- Оценка движения
- Восстановление сцены
- Восстановление изображений
- Выделение на изображениях структур определенного вида, сегментация изображений
- Анализ оптического потока
Распознавание
Классическая задача в компьютерном зрении, обработке изображений и машинном зрении это определение содержат ли видеоданные некоторый характерный объект, особенность или активность.
Эта задача может быть достоверно и легко решена человеком, но до сих пор не решена удовлетворительно в компьютерном зрении в общем случае: случайные объекты в случайных ситуациях.
Один или несколько предварительно заданных или изученных объектов или классов объектов могут быть распознаны (обычно вместе с их двухмерным положением на изображении или трехмерным положением в сцене).
Идентификация
Распознается индивидуальный экземпляр объекта принадлежащего к какому-либо классу.
Примеры: идентификация определённого человеческого лица или отпечатка пальцев или автомобиля.
Обнаружение
Видеоданные проверяются на наличие определенного условия.
Обнаружение, основанное на относительно простых и быстрых вычислениях иногда используется для нахождения небольших участков в анализируемом изображении, которые затем анализируются с помощью приемов, более требовательных к ресурсам, для получения правильной интерпретации.
Распознавание текста
Поиск изображений по содержанию: нахождение всех изображений в большом наборе изображений, которые имеют определенное различными путями содержание.
Оценка положения: определение положения или ориентации определенного объекта относительно камеры.
Оптическое распознавание знаков: распознавание символов на изображениях печатного или рукописного текста (обычно для перевода в текстовый формат, наиболее удобный для редактирования или индексации. Например, ASCII).
Восстановление 3D формы по 2D изображениям осуществляется с помощью стереореконструкции карты глубины, реконструкции поля нормалей и карты глубины по закраске полутонового изображения, реконструкции карты глубины по текстуре и определения формы по перемещению
Пример восстановления 3D формы по 2D изображеню
Оценка движения
Несколько задач, связанных с оценкой движения, в которых последовательность изображений (видеоданные) обрабатываются для нахождения оценки скорости каждой точки изображения или 3D сцены. Примерами таких задач являются: определение трехмерного движения камеры, слежение, то есть следование за перемещениями объекта (например, машин или людей)
Восстановление сцены
Даны два или больше изображения сцены, или видеоданные. Восстановление сцены имеет задачей воссоздать трехмерную модель сцены. В простейшем случае, моделью может быть набор точек трехмерного пространства. Более сложные методы воспроизводят полную трехмерную модель.
Восстановление изображений
Задача восстановления изображений это удаление шума (шум датчика, размытость движущегося объекта и т.д.).
Наиболее простым подходом к решению этой задачи являются различные типы фильтров, таких как фильтры нижних или средних частот.
Более высокий уровень удаления шумов достигается в ходе первоначального анализа видеоданных на наличие различных структур, таких как линии или границы, а затем управления процессом фильтрации на основе этих данных.
Восстановление изображений
Анализ оптического потока (нахождения перемещения пикселей между двумя изображениями).
Несколько задач, связанных с оценкой движения, в которых последовательность изображений (видеоданные) обрабатываются для нахождения оценки скорости каждой точки изображения или 3D сцены.
Примерами таких задач являются: определение трехмерного движения камеры, слежение, т.е. следование за перемещениями объекта (например, машин или людей).
Методы обработки изображений
- Счетчик пикселей
- Бинаризация
- Сегментация
- Чтение штрих-кодов
- Оптическое распознавание символов
- Измерение
- Обнаружение краев
- Сопоставление шаблонов
Счетчик пикселей
Подсчитывает количество светлых или темных пикселей.
С помощью счетчика пикселей пользователь может выделить на экране прямоугольную область в интересующем месте, например там, где он ожидает увидеть лица проходящих людей. Камера в ответ немедленно даст сведения о количестве пикселей, представленных сторонами прямоугольника.
Счетчик пикселей дает возможность быстро проверить, соответствует ли смонтированная камера нормативным требованиям или требованиям заказчика относительно пиксельного разрешения, например, для лиц людей, входящих в двери, которые контролируются камерой, или в целях распознавания номерных знаков.
Бинаризация
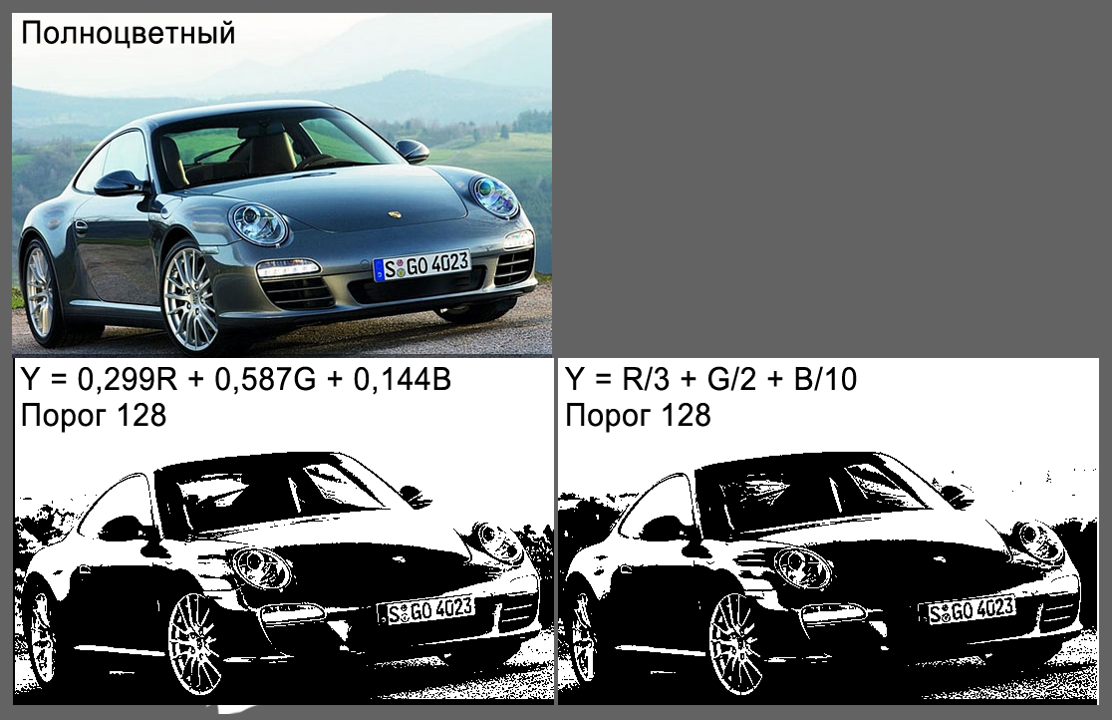
Преобразует изображение в серых тонах в бинарное (белые и черные пиксели).
Значения каждого пикселя условно кодируются, как «0» и «1». Значение «0» условно называют задним планом или фоном а «1» — передним планом.
Часто при хранении цифровых бинарных изображений применяется битовая карта, где используют один бит информации для представления одного пикселя.
Также, особенно на ранних этапах развития техники, двумя возможными цветами были чёрный и белый, что не является обязательным.
Сегментация
Используется для поиска и (или) подсчета деталей.
Цель сегментации заключается в упрощении и/или изменении представления изображения, чтобы его было проще и легче анализировать.
Сегментация изображений обычно используется для того, чтобы выделить объекты и границы (линии, кривые, и т. д.) на изображениях. Более точно, сегментация изображений — это процесс присвоения таких меток каждому пикселю изображения, что пиксели с одинаковыми метками имеют общие визуальные характеристики.
Результатом сегментации изображения является множество сегментов, которые вместе покрывают всё изображение, или множество контуров, выделенных из изображения. Все пиксели в сегменте похожи по некоторой характеристике или вычисленному свойству, например, по цвету, яркости или текстуре. Соседние сегменты значительно отличаются по этой характеристике.
Чтение штрих-кодов
Штрих-код — графическая информация, наносимая на поверхность, маркировку или упаковку изделий, представляющая возможность считывания её техническими средствами — последовательность чёрных и белых полос либо других геометрических фигур.
В машинном зрении штрих-коды используют для декодирования 1D и 2D кодов, разработанных для считывания или сканирования машинами.
Оптическое распознавание символов
Оптическое распознавание символов: автоматизированное чтение текста, например, серийных номеров.
Распознавание используется для конвертации книг и документов в электронный вид, для автоматизации систем учёта в бизнесе или для публикации текста на веб-странице.
Оптическое распознавание текста позволяет редактировать текст, осуществлять поиск слов или фраз, хранить его в более компактной форме, демонстрировать или распечатывать материал, не теряя качества, анализировать информацию, а также применять к тексту электронный перевод, форматирование или преобразование в речь.
Моя программа, написанная на LabView по работе с изображениями
Использовано компьютерное зрение для неразрушающего контроля качества сверхпроводящих материалов.
Введение. Решение задач обеспечения комплексной безопасности (как антитеррористической и механической безопасности объектов, так и технологической безопасности инженерных систем), в настоящее время, требует системной организации контроля, текущего состояния объектов. Одними из наиболее перспективных способов контроля текущего состояния объектов являются оптические и оптико-электронные методы, основанные на технологиях обработки видеоизображений оптического источника. К ним относятся: программы по работе с изображениями; новейшие способы обработки изображений; оборудования для получения, анализа и обработки изображений, т.е. комплекс средств и методов относящихся к области компьютерного и машинного зрения. Компьютерное зрение — это общий набор методов, позволяющих компьютерам видеть и распознавать трех- или двухмерные объекты, как инженерного направления, так и нет. Для работы с компьютерным зрение требуются цифровые или аналоговые устройства ввода-вывода, а также вычислительные сети и IP анализаторы локаций, предназначенные для контроля производственного процесса и подготовки информации для принятия оперативных решений в кратчайшие сроки.
Постановка проблемы. На сегодняшний день, главной задачей для проектируемых комплексов машинного зрения остаётся обнаружение, распознавание, идентификация и квалификация объектов потенциального риска, находящихся в случайном месте в зоне оперативной ответственности комплекса. Существующие на данный момент программные продукты, направленные на решение перечисленных задач обладают рядом существенных недостатков, а именно: значительная сложность, связанная с высокой детализацией оптических образов; высокая потребляемая мощность и достаточно узкий спектр возможностей. Расширение задач обнаружения объектов потенциального риска, до области поиска случайных объектов в случайных ситуациях, находящихся в случайном месте, имеющимися программными продуктами не возможно, даже с задействованием суперкомпьютера.
Цель. Разработка универсальной программы обработки изображений оптического источника, с возможностью потокового анализа данных, то есть программа должна быть лёгкой и быстрой для того, чтобы её можно было записать на малогабаритное ЭВМ устройство.
Задачи:
- разработка математической модели программы;
- написание программы;
- опробирование программы в условиях лабораторного эксперимента, с полной подготовкой и проведением эксперимента;
- исследование возможности применения программы в смежных областях деятельности.
Актуальность программы определяется:
- отсутствием на рынке программного обеспечения программ обработки изображений с выводом подробного анализа инженерных составляющих объектов;
- постоянно растущими требованиями к качеству и скорости получения визуальной информации, резко повышающими востребованность программ обработки изображений;
- существующей потребность в программах высокой производительности, надежных и простых с точки зрения пользователя;
- высокой стоимостью профессиональных программ обработки визуальной информации.
Анализ актуальности разработки программы.
- отсутствием на рынке программного обеспечения программ обработки изображений с выводом подробного анализа инженерных составляющих объектов;
- постоянно растущими требованиями к качеству и скорости получения визуальной информации, резко повышающими востребованность программ обработки изображений;
- существующей потребность в программах высокой производительности, надежных и простых с точки зрения пользователя;
- существует потребность программ высокой производительности и простого управления, чего добиться в наше время крайне сложно. Для примера я взял Adobe Photoshop. Данный графический редактор обладает гармоничным сочетанием функциональности и простоты использования для рядового пользователя, но в данной программе невозможно работать со сложными инструментами по обработке изображения (например, анализ изображения путём построения математической зависимости (функции) или же интегральной обработкой изображений);
- высокой стоимостью профессиональных программ обработки визуальной информации. Если программное обеспечение качественно, то цена на него крайне высока, вплоть до отдельных функции того или иного набора программ. На графике ниже представлена зависимость цены/качества простых аналогов программы.
Для упрощения решения задач данного типа, мною была разработана математическая модель и написана программа для ЭВМ устройства по анализу изображения при помощи простейших преобразований исходных изображений.
Программа работает с преобразованиями типа бинаризации, яркости, контраста изображения и т.д. Принцип действия программы продемонстрирован на примере анализа сверхпроводящих материалов.
При создании композиционных сверхпроводников на основе Nb3Sn варьируется объемное соотношение бронзы и ниобия, размер и количество волокон в нем, равномерность их распределения по сечению бронзовой матрицы, наличие диффузионных барьеров и стабилизирующих материалов. При заданной объемной доле ниобия в проводнике увеличение количества волокон приводит, соответственно, к уменьшению их диаметра. Это ведет к заметному возрастанию поверхности взаимодействия Nb / Cu-Sn, что в значительной степени ускоряет процесс нарастания сверхпроводящей фазы. Такое увеличение количества сверхпроводящей фазы при повышении числа волокон в проводнике обеспечивает возрастание критических характеристик сверхпроводника. В связи с этим необходимо наличие инструмента для контроля объемной доли сверхпроводящей фазы в конечном продукте (композиционном сверхпроводнике).
При создании программы учитывалась важность проведения исследований материалов, из которых создаётся сверхпроводящие кабели, так как при неправильном соотношении ниобия к бронзе возможен взрыв проводов, а, следовательно, людские жертвы, денежные затраты и потеря времени. Данная программа позволяет определить качество проводов на основе химическо физического анализа объекта.
Блок-диаграмма программы
Описание этапов исследования.
1 этап. Пробоподготовка: резка композиционного сверхпроводника на электроэрозионном станке; запрессовка образца в пластмассовую матрицу; полировка образца до зеркального состояния; травление образца для выделения волокон ниобия на бронзовой матрице. Получены образцы запрессованных композиционных сверхпроводниковых образцов;
2 этап. Получение изображений: получение металлографических изображений на сканирующем электронном микроскопе.
3 этап. Обработка изображений: создание инструмента для определения объемной доли сверхпроводящей фазы на металлографическом изображении; набор статистически значимых данных на конкретном типе образцов. Созданы математические модели различных инструментов по обработке изображений; создана программная разработка для оценки объемной доли сверхпроводящий фазы; программа была облегчена путём соединения нескольких математических функций в одну; было получено среднее значение объемной доли волокон ниобия в бронзовой матрице 24.7±0,1 %. Низкий процент отклонения свидетельствует о высокой повторяемости структуры композиционного провода.
Электронномикроскопическое изображения композиционных сверхпроводников
Методы обработки изображений в программе.
- Идентификация — распознается индивидуальный экземпляр объекта, принадлежащего к какому-либо классу.
- Бинаризация – процесс перевода цветного (или в градациях серого) изображения в двухцветное черно-белое.
- Сегментация — это процесс разделения цифрового изображения на несколько сегментов (множество пикселей, также называемых суперпикселями).
- Эрозия – сложный процесс, при выполнении которого структурный элемент проходит по всем пикселам изображения. Если в некоторой позиции каждый единичный пиксел структурного элемента совпадет с единичным пикселом бинарного изображения, то выполняется логическое сложение центрального пиксела структурного элемента с соответствующим пикселом выходного изображения.
- Дилатация — свертка изображения или выделенной области изображения с некоторым ядром. Ядро может иметь произвольную форму и размер. При этом в ядре выделяется единственная ведущая позиция, которая совмещается с текущим пикселем при вычислении свертки.
Формулы работы программы
Формула бинаризации (метод Оцу):
Формула эрозии:
Формула дилатации:
Схема дилатации и эрозии
Формулы сегментации порогами цвета:
Определение модуля градиента яркости для каждого пикселя изображения:
Вычисление порога:
Использованное оборудование
- CHMER GX-320L с ЧПУ — станок для электроэрозионной резки образцов
- SimpliMet 1000 — станок для горячей запрессовки
- AutoMet 250 Buehler – машина для шлифовки и полировки
- Axio Scope A1 Carl Zeiss – оптический микроскоп для контроля качества шлифов
- Hitachi TM-1000 — сканирующий электронный микроскоп для получения металлографических изображений
Интерфейс программы

