
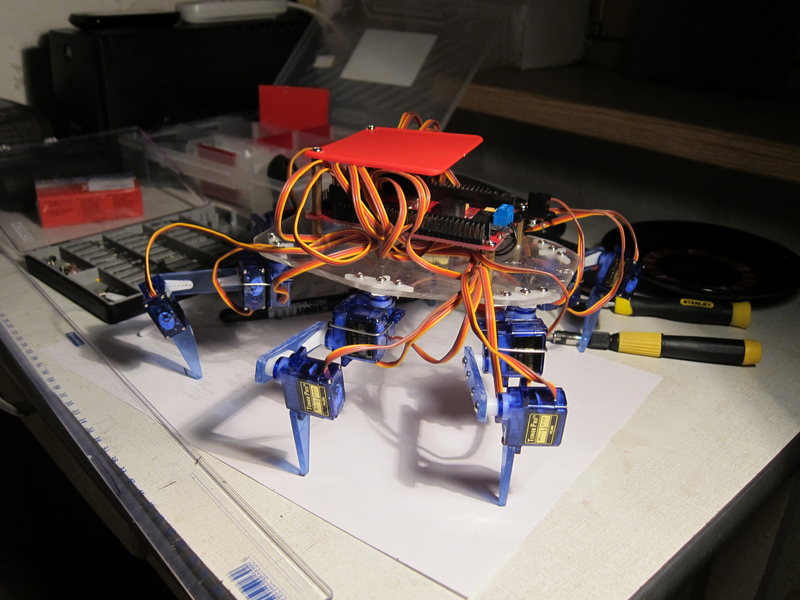
Много чего предстоит сделать, прежде чем мы дойдем до вот этой картинки:
Опуская росказни о том, как именно я пришел к мысли построить гексапода (это были тонны видео на ютубе), перейду сразу к процессу выбора деталек. Это был январь 2012-го. Я сразу знал, чего я хочу от своего робота, а чего — нет. Я хотел:
— каждая нога должна иметь 3 степени свободы — 3dof (3 dimensions of freedom). Потому что более простой вариант 2dof — не дает такого ощущения насекомого, а 4dof — излишне, 3dof и так позволяет свободно перемещать кончик ноги в 3д пространстве;
— 6 ног; снова-таки, это уже не 4 (тогда робот неуклюже скачет), но и еще и не 8, как у пауков и уже чрезмерно;
— небольшой;
— дешевый;
— минимум плат и соединений;
Пост большой.
Опуская росказни о том, как именно я пришел к мысли построить гексапода (это были тонны видео на ютубе), перейду сразу к процессу выбора деталек. Это был январь 2012-го. Я сразу знал, чего я хочу от своего робота, а чего — нет. Я хотел:
— каждая нога должна иметь 3 степени свободы — 3dof (3 dimensions of freedom). Потому что более простой вариант 2dof — не дает такого ощущения насекомого, а 4dof — излишне, 3dof и так позволяет свободно перемещать кончик ноги в 3д пространстве;
— 6 ног; снова-таки, это уже не 4 (тогда робот неуклюже скачет), но и еще и не 8, как у пауков и уже чрезмерно;
— небольшой;
— дешевый;
— минимум плат и соединений;
Пост большой.