В этой статье мы смоделируем и исследуем протокол двухфазного коммита с помощью TLA+.
Протокол двухфазного коммита практичный и сегодня используется во многих распределённых системах. Тем не менее, он достаточно краткий. Поэтому мы можем быстро смоделировать его и многому научиться. На самом деле этим примером мы проиллюстрируем, какой результат в распределённых системах фундаментально невозможен.
Транзакция проходит через диспетчеры ресурсов (RM). Все RM должны договориться, будет транзакция завершена или прервана.
Менеджер транзакций (TM) принимает окончательное решение: коммит или отмена. Условием для коммита является готовность к коммиту всех RM. В противном случае транзакцию следует отменить.
Для простоты мы выполняем моделирование в модели общей памяти, а не в системе передачи сообщений. Это также обеспечивает быструю проверку модели. Но мы добавим неатомарность к действиям «чтение из соседнего узла и обновление состояния», чтобы захватить интересное поведение при передаче сообщений.
RM может только читать состояние TM и читать/обновлять собственное состояние. Он не может прочитать состояние другого диспетчера ресурсов. ТМ может читать состояние всех узлов RM и читать/обновлять собственное состояние.
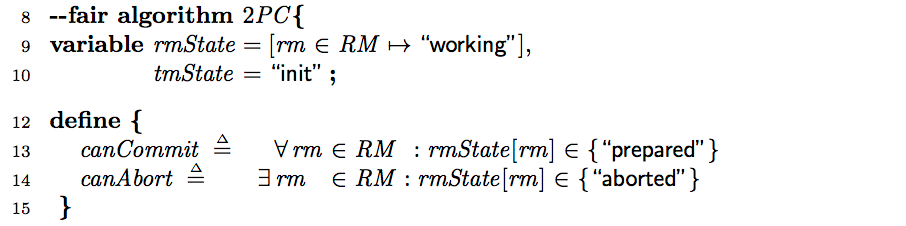
Строки 9-10 устанавливают начальный
Предикат
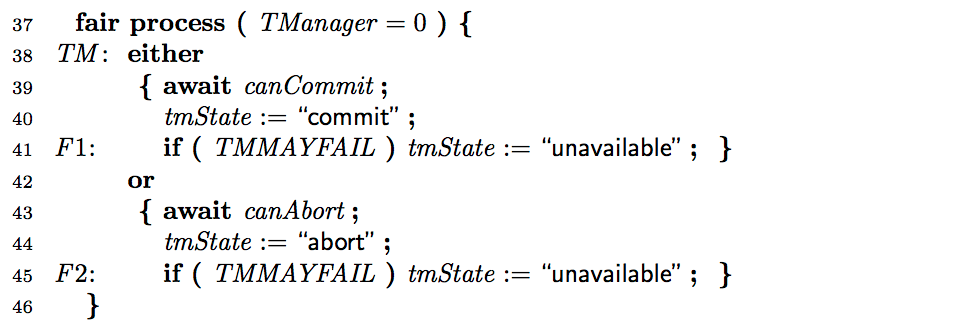
Моделирование ТМ простое. Менеджер транзакций проверяет возможность коммита или отмены — и соответственно обновляет
Существует возможность, что TM не сможет сделать

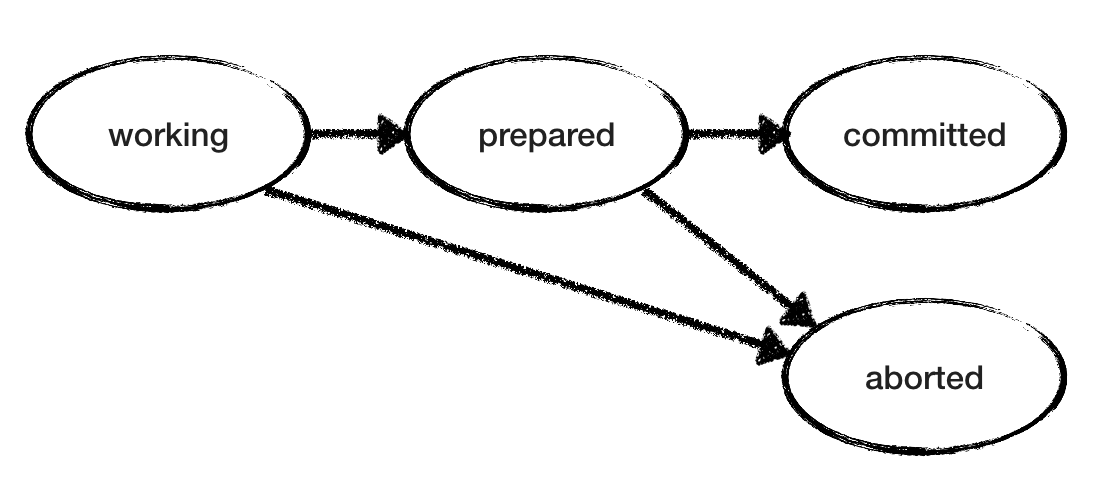
Модель RM тоже простая. Поскольку «рабочие» и «подготовленные» состояния неконечные, RM недетерминированно выбирает среди действий, пока не достигнет конечного состояния. «Рабочий» RM может перейти в «прерванное» или «подготовленное» состояние. «Подготовленный» RM ожидает от TM решения коммит/отмена — и действует соответственно. На рисунке ниже показаны возможные переходы состояний для одного RM. Но обратите внимание, что у нас несколько RM, каждый из которых проходит через свои состояния в своём темпе без знания состояния других RM.
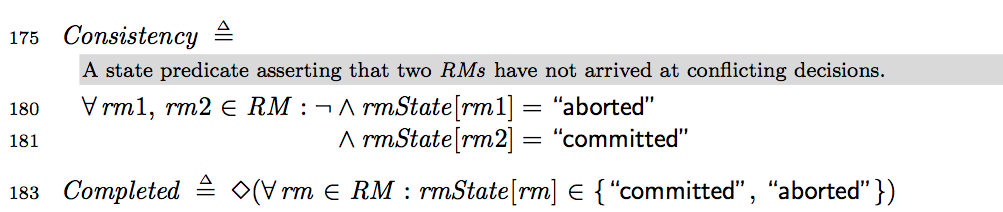
Нам нужно проверить согласованность нашего двухфазного коммита: чтобы не было разных RM, один из которых говорит «коммит», а другой «аборт».
Предикат
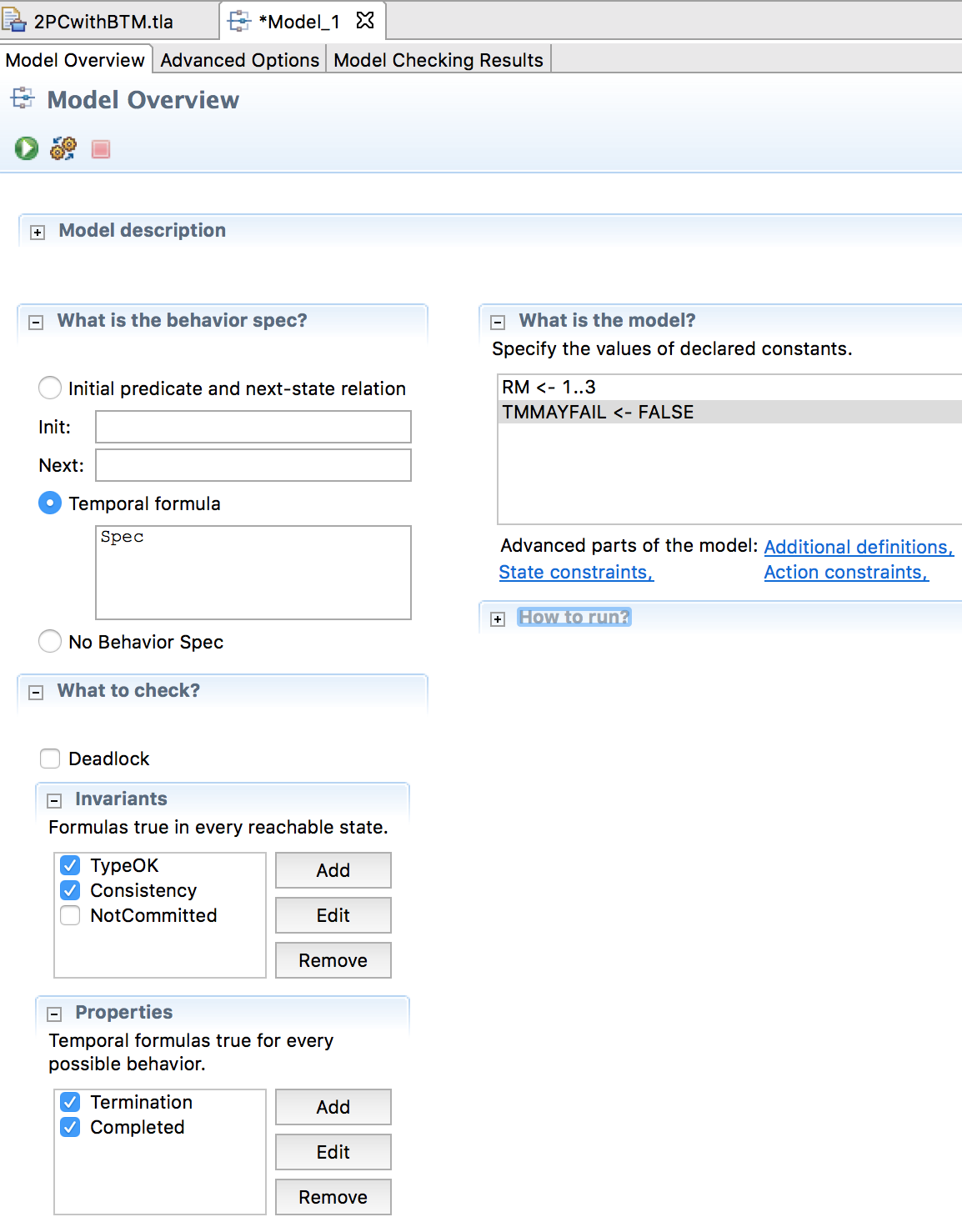
Теперь мы готовы проверить модель протокола. Изначально мы установили
Теперь установим
Мы видим, что на этапе
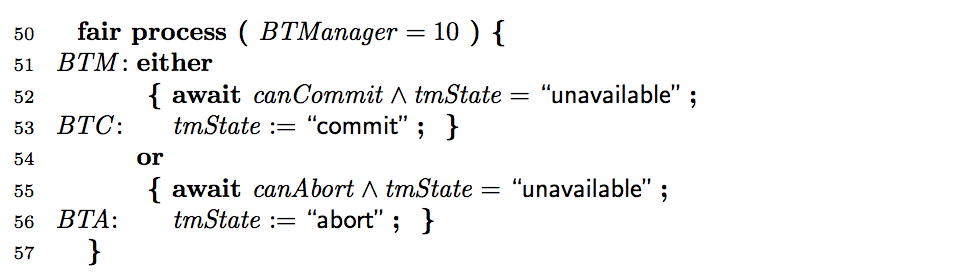
Чтобы избежать зависания транзакций, добавляем резервный ТМ (BTM), который быстро берёт на себя управление, если основной ТМ недоступен. Для принятия решений BTM использует ту же логику, что и TM. И для простоты мы предполагаем, что BTM никогда не падает.
Когда мы проверяем модель с добавленным процессом BTM, то получаем новое сообщение об ошибке.
BTM не может принять коммит, поскольку наше оригинальное условие
Успех! Когда мы проверяем модель, то достигаем и согласованности, и завершённости, поскольку BTM берёт на себя управление и завершает транзакцию, если TM падает. Вот модель 2PCwithBTM в TLA+ (BTM и вторая строка canCommit изначально раскомменчены) и соответствующий pdf.
Мы предположили, что RM надёжны. Теперь отменим это условие и посмотрим, как ведёт себя протокол при сбое RM. Добавляем «недоступное» состояние в модель сбоя. Чтобы исследовать поведение и смоделировать прерывистую потерю доступности, позволяем аварийному RM восстановиться и продолжить работу, прочитав своё состояние из лога. Вот ещё одна диаграмма перехода состояния RM с добавленным «недоступным» состоянием и переходами, отмеченными красным цветом. А ниже — пересмотренная модель для RM.
Необходимо также доработать

Когда мы проверяем модель, то возникает проблема несоответствия! Как это могло произойти? Проследим за трассировкой.
При
В этом случае BTM принял решение, которое нарушило согласованность. С другой стороны, если заставить BTM ждать выхода RM из недоступного состояния, он может навечно зависнуть в случае аварии на узле, и это нарушит условие выполнения (прогресса).
Обновленный файл модели TLA+ доступен здесь, а также соответствующий pdf.
Итак, что же произошло? Мы уткнулись в теорему Фишера, Линча, Патерсона (FLP) о невозможности консенсуса в асинхронной системе со сбоями.
В нашем примере BTM не может правильно решить, находится RM2 в состоянии сбоя или нет — и некорректно принимает решение прервать транзакцию. Если бы решение принимал только исходный TM, такая неточность в распознавании сбоя не стала бы проблемой. RM подчинятся любому решению ТМ, так что сохранятся и согласованность, и прогресс выполнения.
Проблема в том, что у нас два объекта принимают решения: TM и BTM, они смотрят на состояние RM в разное время и принимают разные решения. Такая асимметричность информации — корень всего зла в распределённых системах.
Проблема не исчезает даже с расширением до трёхфазного коммита. Вот трёхфазный коммит, смоделированный в TLA+ (версия pdf), а ниже трассировка ошибки, которая показывает, что на этот раз нарушен прогресс (на странице Википедии о трёхфазном коммите описывается ситуация, когда RM1 подвисает после получения решения перед коммитом, а RM2 и RM3 совершают коммит, что нарушает согласованность).

Но не всё потеряно, надежда не умерла. У нас есть Paxos. Он аккуратно действует в пределах теоремы FLP. Инновация Paxos заключается в том, что он всегда безопасен (даже при наличии неточных детекторов, асинхронного выполнения и сбоев), и в конечном итоге завершает транзакцию, когда консенсус становится возможным.
Можно эмулировать TM на кластере с тремя узлами Paxos, и это решит проблему несогласованности TM/BTM. Или, как показали Грей и Лэмпорт в научной статье по консенсусу в коммите транзакций, если RM используют контейнер Paxos для хранения своих решений одновременно с ответом TM, это избавляет от одного лишнего шага в алгоритме стандартного протокола.
Протокол двухфазного коммита практичный и сегодня используется во многих распределённых системах. Тем не менее, он достаточно краткий. Поэтому мы можем быстро смоделировать его и многому научиться. На самом деле этим примером мы проиллюстрируем, какой результат в распределённых системах фундаментально невозможен.
Проблема двухфазного коммита
Транзакция проходит через диспетчеры ресурсов (RM). Все RM должны договориться, будет транзакция завершена или прервана.
Менеджер транзакций (TM) принимает окончательное решение: коммит или отмена. Условием для коммита является готовность к коммиту всех RM. В противном случае транзакцию следует отменить.
Некоторые замечания о моделировании
Для простоты мы выполняем моделирование в модели общей памяти, а не в системе передачи сообщений. Это также обеспечивает быструю проверку модели. Но мы добавим неатомарность к действиям «чтение из соседнего узла и обновление состояния», чтобы захватить интересное поведение при передаче сообщений.
RM может только читать состояние TM и читать/обновлять собственное состояние. Он не может прочитать состояние другого диспетчера ресурсов. ТМ может читать состояние всех узлов RM и читать/обновлять собственное состояние.
Определения
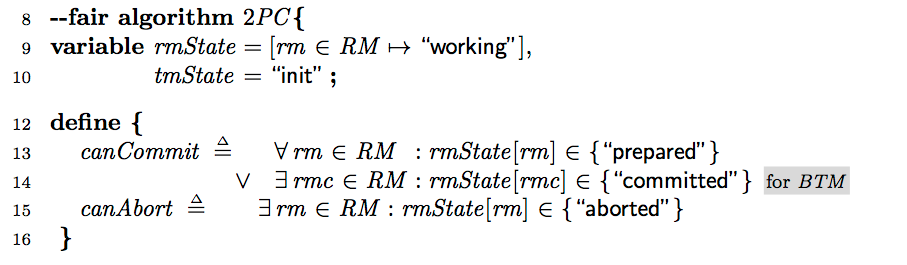
Строки 9-10 устанавливают начальный
rmState для каждого RM на working, а ТМ — на init.Предикат
canCommit определяется как true, если все RM «подготовлены» (готовы к коммиту). Если существует RM в состоянии «отбой», то справедливым становится предикат canAbort.Моделирование ТМ простое. Менеджер транзакций проверяет возможность коммита или отмены — и соответственно обновляет
tmState.Существует возможность, что TM не сможет сделать
tmState «недоступным», но только если константа TMMAYFAIL установлена в значение true до начала проверки модели. В TLA+ метки определяют степень атомарности, то есть её гранулярность. Метками F1 и F2 мы обозначаем, что соответствующие операторы выполняются неатомарно (после некоторого неопределённого времени) по отношению к предыдущим операторам.Модель RM
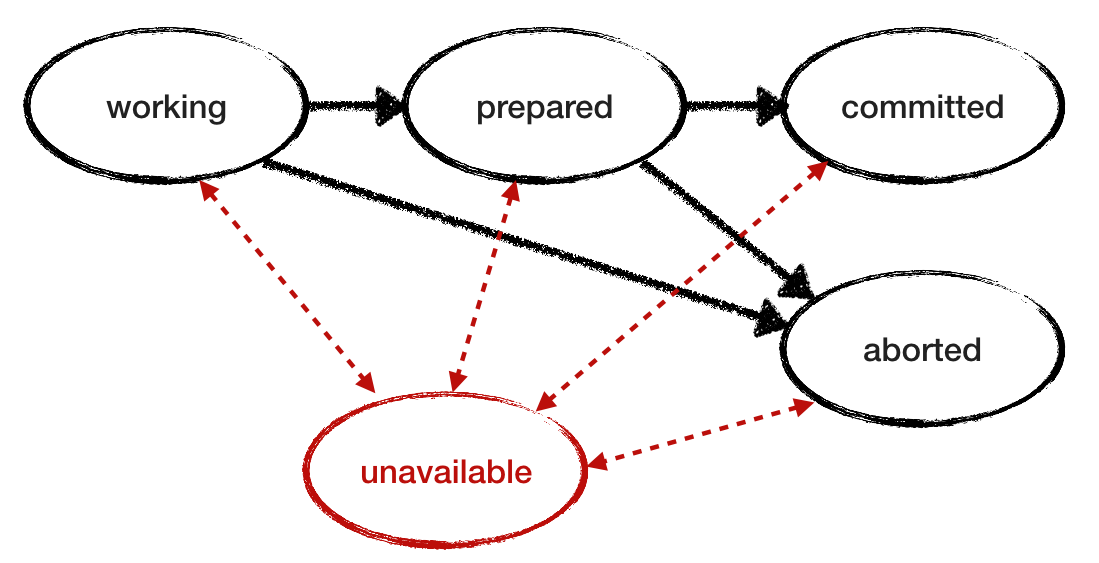
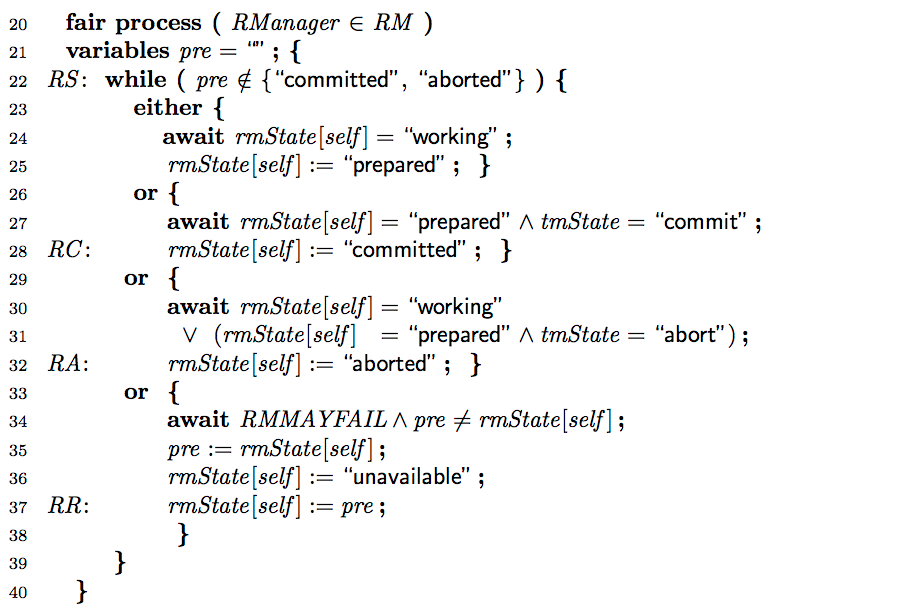
Модель RM тоже простая. Поскольку «рабочие» и «подготовленные» состояния неконечные, RM недетерминированно выбирает среди действий, пока не достигнет конечного состояния. «Рабочий» RM может перейти в «прерванное» или «подготовленное» состояние. «Подготовленный» RM ожидает от TM решения коммит/отмена — и действует соответственно. На рисунке ниже показаны возможные переходы состояний для одного RM. Но обратите внимание, что у нас несколько RM, каждый из которых проходит через свои состояния в своём темпе без знания состояния других RM.
Модель двухфазного коммита
Нам нужно проверить согласованность нашего двухфазного коммита: чтобы не было разных RM, один из которых говорит «коммит», а другой «аборт».
Предикат
Completed проверяет, что протокол не висит вечно: в конце концов каждая RM достигает конечного состояния committed или aborted.Теперь мы готовы проверить модель протокола. Изначально мы установили
TMMAYFAIL=FALSE, RM=1..3 для запуска протокола с тремя RM и одним TM, то есть в надёжной конфигурации. Проверка модели занимает 15 секунд и говорит, что ошибок нет. И Consistency, и Completed удовлетворены любым возможным выполнением протокола с любым чередованием действий RM и действий TM.Теперь установим
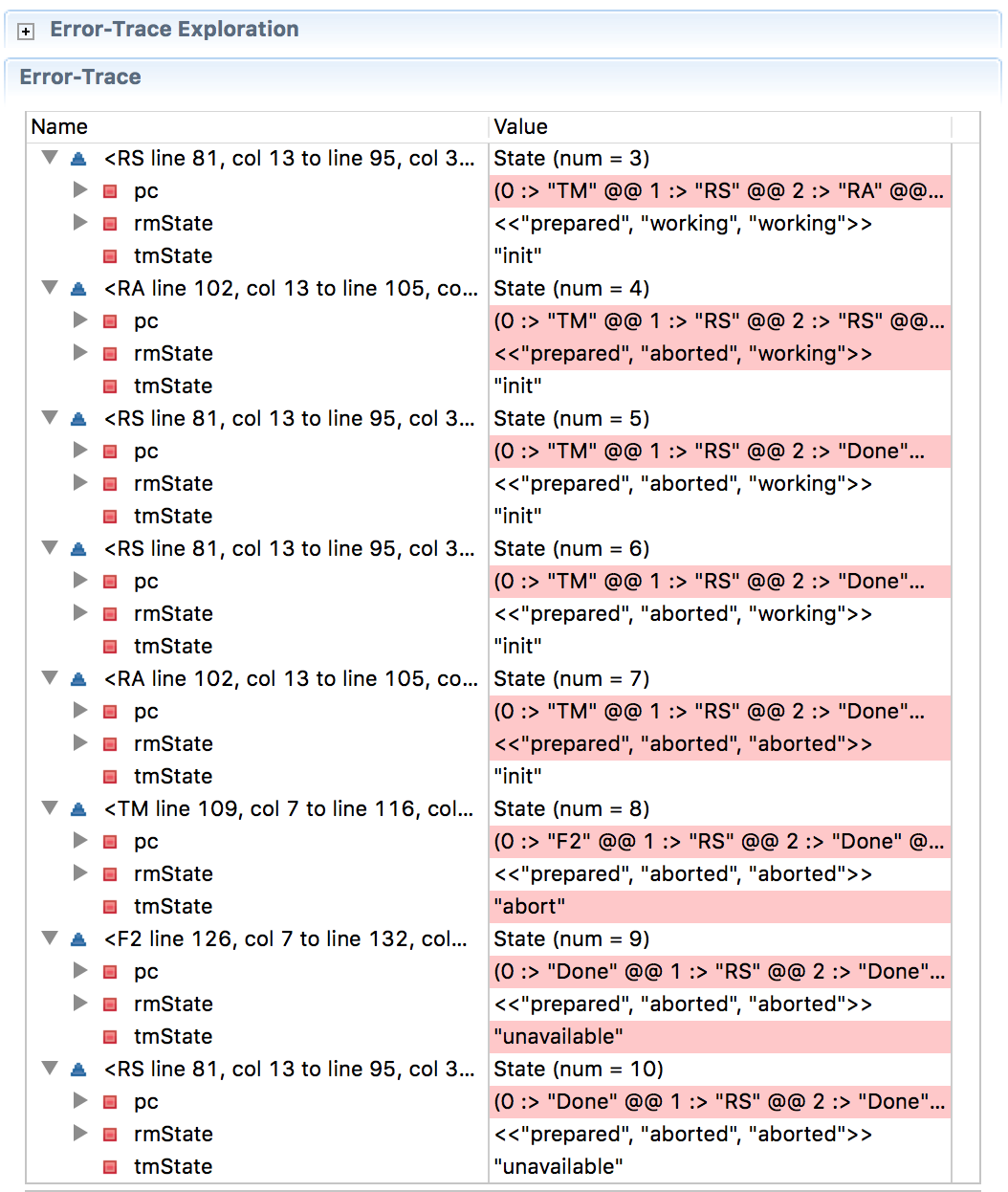
TMMAYFAIL=TRUE и перезапустим проверку. Программа быстро выдаёт противоположный результат, где RM застряли в ожидании ответа от недоступной TM.Мы видим, что на этапе
State=4 прерываются переходы RM2, на State=7 прерываются переходы RM3, на State=8 ТМ переходит в состояние «отбой» и падает на State=9. На State=10 система зависает, потому что RM1 навсегда остаётся в подготовленном состоянии, ожидая решения от упавшего TM.Моделирование BTM
Чтобы избежать зависания транзакций, добавляем резервный ТМ (BTM), который быстро берёт на себя управление, если основной ТМ недоступен. Для принятия решений BTM использует ту же логику, что и TM. И для простоты мы предполагаем, что BTM никогда не падает.
Когда мы проверяем модель с добавленным процессом BTM, то получаем новое сообщение об ошибке.
BTM не может принять коммит, поскольку наше оригинальное условие
canCommit утверждает, что все RMstates должны быть «подготовлены» и не учитывает условие, когда одни RM уже получили решение о коммите от оригинального ТМ до того, как BТМ взял на себя управление. Нужно переписать условия canCommit с учётом такой ситуации.Успех! Когда мы проверяем модель, то достигаем и согласованности, и завершённости, поскольку BTM берёт на себя управление и завершает транзакцию, если TM падает. Вот модель 2PCwithBTM в TLA+ (BTM и вторая строка canCommit изначально раскомменчены) и соответствующий pdf.
Что если RM тоже потерпят неудачу?
Мы предположили, что RM надёжны. Теперь отменим это условие и посмотрим, как ведёт себя протокол при сбое RM. Добавляем «недоступное» состояние в модель сбоя. Чтобы исследовать поведение и смоделировать прерывистую потерю доступности, позволяем аварийному RM восстановиться и продолжить работу, прочитав своё состояние из лога. Вот ещё одна диаграмма перехода состояния RM с добавленным «недоступным» состоянием и переходами, отмеченными красным цветом. А ниже — пересмотренная модель для RM.
Необходимо также доработать
canAbort с учётом состояния недоступности. ТМ может принять решение «отбой», если какая-то из служб находится в прерванном или недоступном состоянии. Если опустить это условие, то упавший и не восстановленный RM прервёт ход выполнения транзакции. Конечно, опять следует учесть RM, которые узнали решение о завершении транзакции от исходного TM.Проверка модели
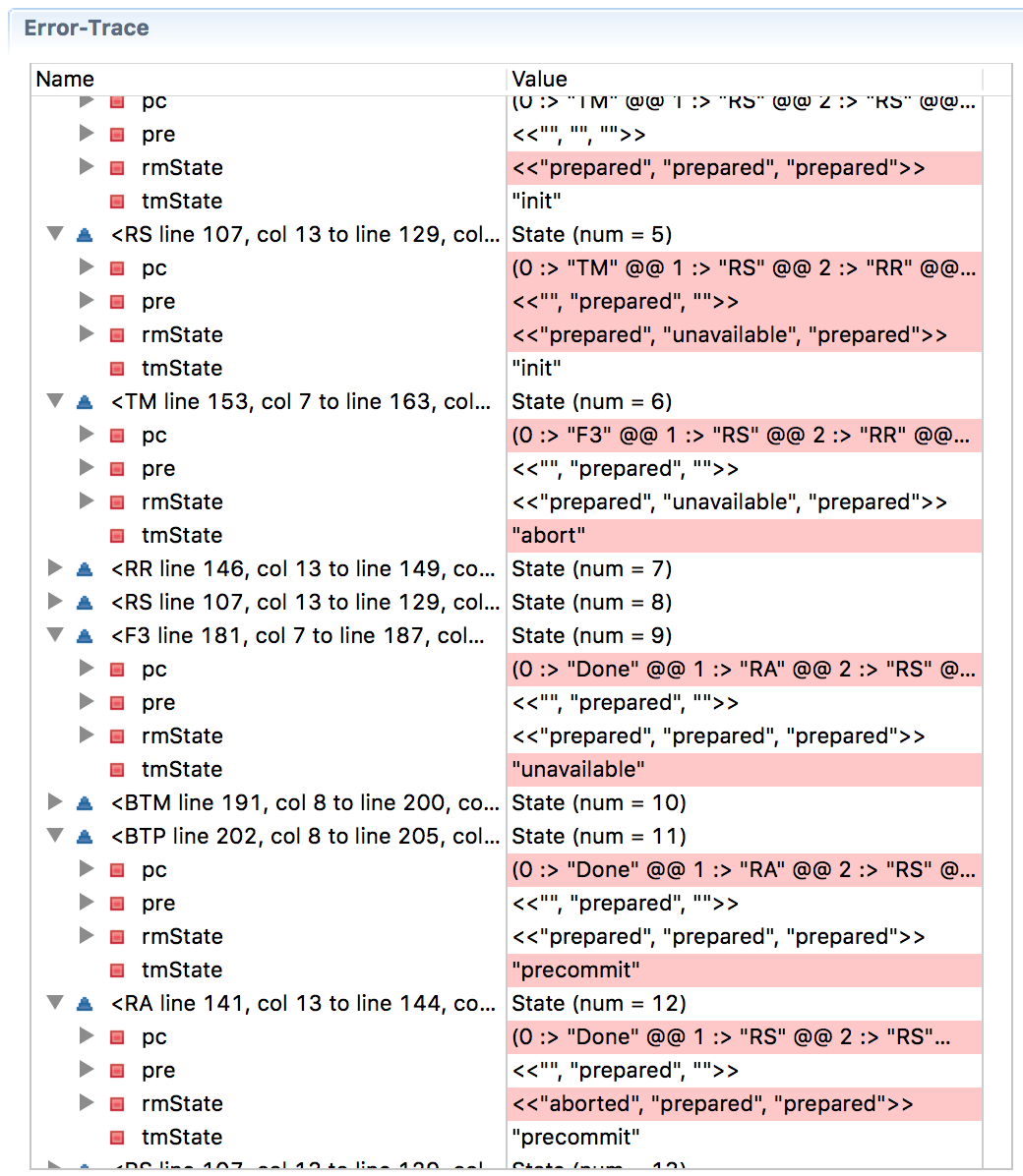
Когда мы проверяем модель, то возникает проблема несоответствия! Как это могло произойти? Проследим за трассировкой.
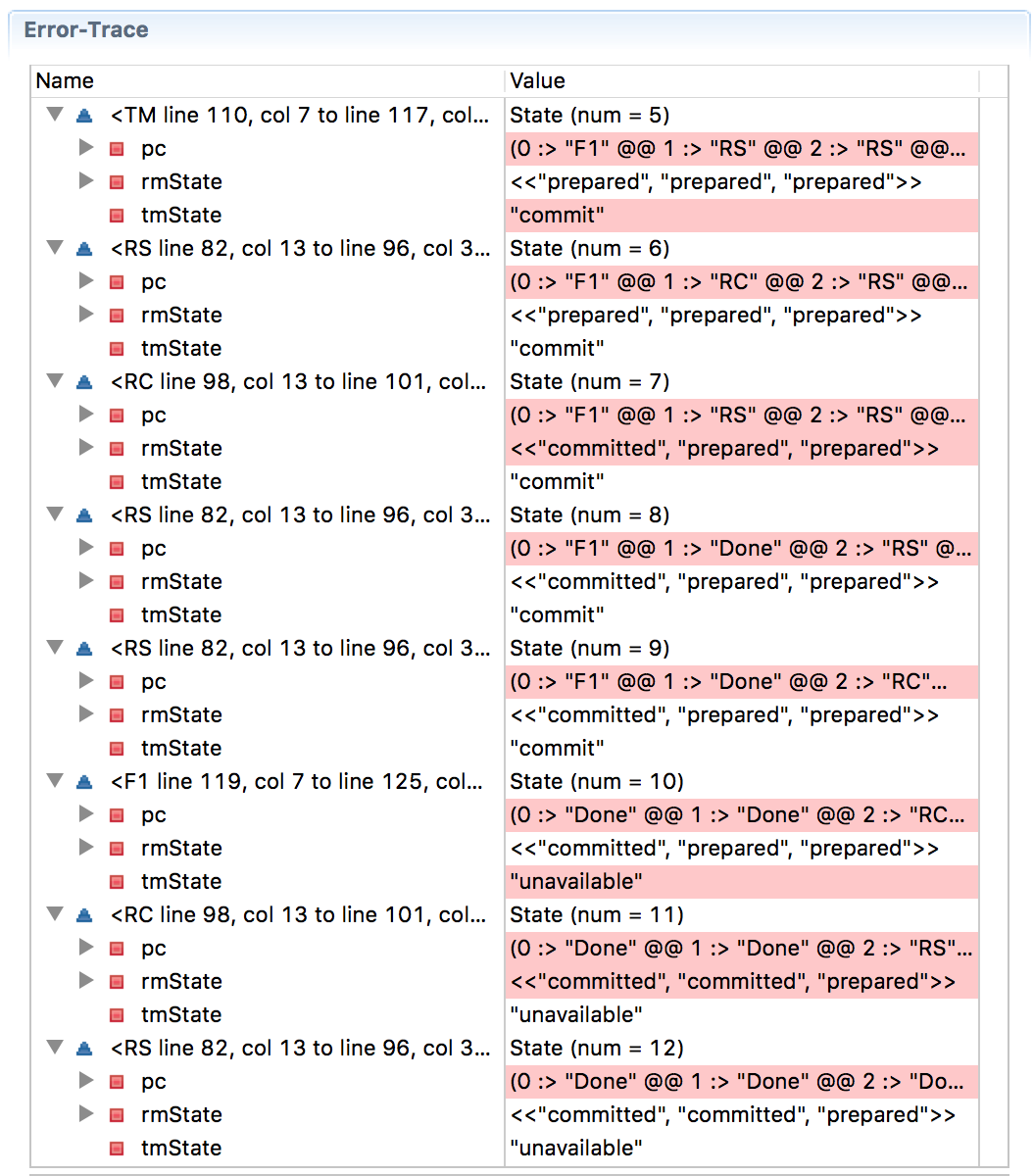
При
State=6 все RM находятся в подготовленном состоянии, ТМ принял решение о завершении транзакции, RM1 увидел это решение и перешёл на метку RC, что означает готовность изменить своё состояние на «завершённый». (Запомните RM1, этот пистолет выстрелит в последнем акте). К сожалению, ТМ обваливается на этапе State=7, и RM2 становится недоступен на State=8. На девятом шаге резервный BTM берёт управление на себя и считывает состояние трёх RM как «подготовлено, недоступно, подготовлено» — и принимает решение отменить транзакцию на десятом шаге. Помните RM1? Он принимает решение завершить транзакцию, потому что получил такое решение от исходного TM, и переходит в состояние committed на 11-м шаге. В State=13 RM3 выполняет решение прервать транзакцию от BTM и переходит в состояние aborted — и вот у нас нарушена согласованность с RM1.В этом случае BTM принял решение, которое нарушило согласованность. С другой стороны, если заставить BTM ждать выхода RM из недоступного состояния, он может навечно зависнуть в случае аварии на узле, и это нарушит условие выполнения (прогресса).
Обновленный файл модели TLA+ доступен здесь, а также соответствующий pdf.
Невозможность FLP
Итак, что же произошло? Мы уткнулись в теорему Фишера, Линча, Патерсона (FLP) о невозможности консенсуса в асинхронной системе со сбоями.
В нашем примере BTM не может правильно решить, находится RM2 в состоянии сбоя или нет — и некорректно принимает решение прервать транзакцию. Если бы решение принимал только исходный TM, такая неточность в распознавании сбоя не стала бы проблемой. RM подчинятся любому решению ТМ, так что сохранятся и согласованность, и прогресс выполнения.
Проблема в том, что у нас два объекта принимают решения: TM и BTM, они смотрят на состояние RM в разное время и принимают разные решения. Такая асимметричность информации — корень всего зла в распределённых системах.
Проблема не исчезает даже с расширением до трёхфазного коммита. Вот трёхфазный коммит, смоделированный в TLA+ (версия pdf), а ниже трассировка ошибки, которая показывает, что на этот раз нарушен прогресс (на странице Википедии о трёхфазном коммите описывается ситуация, когда RM1 подвисает после получения решения перед коммитом, а RM2 и RM3 совершают коммит, что нарушает согласованность).
Paxos старается сделать мир лучше
Но не всё потеряно, надежда не умерла. У нас есть Paxos. Он аккуратно действует в пределах теоремы FLP. Инновация Paxos заключается в том, что он всегда безопасен (даже при наличии неточных детекторов, асинхронного выполнения и сбоев), и в конечном итоге завершает транзакцию, когда консенсус становится возможным.
Можно эмулировать TM на кластере с тремя узлами Paxos, и это решит проблему несогласованности TM/BTM. Или, как показали Грей и Лэмпорт в научной статье по консенсусу в коммите транзакций, если RM используют контейнер Paxos для хранения своих решений одновременно с ответом TM, это избавляет от одного лишнего шага в алгоритме стандартного протокола.
