На прошлых выходных на выставке Robotics Expo ребята из компании CopterTime.ru продемонстрировали мне первый в Москве опенсорсный квадрокоптер IRIS+ от 3DRobotics.
Квадрокоптер 3DR IRIS+ это отличный дрон дляслежения за женой съемок фото и видео с воздуха. Квадрокоптером можно управлять в режиме реального времени, либо заранее задав программу для автопилота (по точкам, либо «следуй за белым кроликом мной»)

52.000 рублей, OpenSource софт, 16 минут полета, 400 грамм полезной нагрузки, функция «Следуй за мной», автоматическое планирование миссии

«Следуй за мной» — технология, позволяющая следовать за объектом, превращая квадрокоптер в следящую камеру. IRIS+ может следить за любым Android устройством с GPS. Не только сам квадрокоптер будет следовать за Вами, но и управляемый подвес будет держать Вас в центре кадра.
Под катом немного инфы про блистательного писателя/предпринимателя-визионера Криса Андерсона (основателя фирмы 3DRobotics), фотки общего вида дрона IRIS+, фотки того как мы развинтили дрон и потом совершили тестовый полет. (А так же фотки детей в салатовых костюмахасфальтоукладчиков и Ричарда Брэнсона)

Я немного покопался в сети и нашел, что основатель 3DRobotics довольно-таки выдающийся мужик (экс-редактор Wired и The Economist). Как я понимаю, широкую известность Крис Андерсон (не путать с Крисом Андерсоном, который куратор TED) получил, когда выпустил весьма фундаментальную книгу Long Tail (про которую я впервые услышал в 2009 году от гендира российского Гугла Владимира Долгова)
Выступление на TED про «Длинный Хвост»
Чуть позже Крис написал в том же Wired статью «Atoms Are the New Bits» перевод которой есть на Хабре в 5 частях (1, 2, 3, 4, 5)
Так же Крис создатель сообщества отцов-гиков GeekDad.com
и сообщества дронов-самоделкиных DIYdrones.com

Ну и основная деятельность — дроны (3DRobotics):




в качестве платформы используется старый пульт — Turnigy 9x. Но он был доработан. Стандартная прошивка заменена на
кастомную 9XR, позволяющую проводить более глубокие настройки, нормально назначать переключатели и поддерживающую вывод телеметрии. В качестве передающего модуля установлен FRSKY DJT с телеметрией, которая заведена внутрь пульта и отображается на дисплее. Очень удобно, что на самом пульте переделаны наклейки, подписаны функции переключателей
 Используя бесплатное приложение — DroidPlanner, пользователи IRIS+ могут составлять полетные задания просто рисуя миссию на любом Android планшете или смартфоне. Это позволяет осуществлять полностью автономные полеты с неограниченным количеством точек.
Используя бесплатное приложение — DroidPlanner, пользователи IRIS+ могут составлять полетные задания просто рисуя миссию на любом Android планшете или смартфоне. Это позволяет осуществлять полностью автономные полеты с неограниченным количеством точек.
Безопасность полетов — IRIS+ может приземляться самостоятельно при разряде батарей или возвращаться в точку взлета, если достигнут установленный лимит расстояния или заканчивается заряд батареи.

Изначально Ириска заточена под камеру GoPro, в комплекте даже крепление для нее имеется и можно приобрести дополнительный стабилизационный подвес.
Полетный контроллер ArduPilot является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования — автоматическое управление по заранее созданному маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
APM разрабатывается сообществом DIY Drones и базируется на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.

APM:Copter
APM Planner 2.0

Брэнсон думает, как же сделать космических дронов из «исходников» 3D Robotics
P.S.
Квадрокоптер 3DR IRIS+ это отличный дрон для

52.000 рублей, OpenSource софт, 16 минут полета, 400 грамм полезной нагрузки, функция «Следуй за мной», автоматическое планирование миссии

«Следуй за мной» — технология, позволяющая следовать за объектом, превращая квадрокоптер в следящую камеру. IRIS+ может следить за любым Android устройством с GPS. Не только сам квадрокоптер будет следовать за Вами, но и управляемый подвес будет держать Вас в центре кадра.
пруф
Под катом немного инфы про блистательного писателя/предпринимателя-визионера Криса Андерсона (основателя фирмы 3DRobotics), фотки общего вида дрона IRIS+, фотки того как мы развинтили дрон и потом совершили тестовый полет. (А так же фотки детей в салатовых костюмах
Про основателя:

Я немного покопался в сети и нашел, что основатель 3DRobotics довольно-таки выдающийся мужик (экс-редактор Wired и The Economist). Как я понимаю, широкую известность Крис Андерсон (не путать с Крисом Андерсоном, который куратор TED) получил, когда выпустил весьма фундаментальную книгу Long Tail (про которую я впервые услышал в 2009 году от гендира российского Гугла Владимира Долгова)
Выступление на TED про «Длинный Хвост»
Чуть позже Крис написал в том же Wired статью «Atoms Are the New Bits» перевод которой есть на Хабре в 5 частях (1, 2, 3, 4, 5)
Так же Крис создатель сообщества отцов-гиков GeekDad.com

и сообщества дронов-самоделкиных DIYdrones.com

Ну и основная деятельность — дроны (3DRobotics):

IRIS+

- Полезная нагрузка 400 гр.
- Встроенные диоды на всех лучах для легкой ориентации
- Пульт управления с выводом телеметрии на экран
- Самозатягивающиеся пропеллеры
- Готов к полету прямо из коробки, просто установите пропеллеры, зарядите батарею и квадрокоптер готов к полету в ручном режиме при помощи встроенного контроллера или автономному полету с помощью MAC, Windows PC или Android устройства.
Большие картинки со всех сторон








Комплектация IRIS+:
* FPV комплект, подвес для камеры и камера не входят в стоимость.
Мужик объясняет американцам как собрать «ириску»
(Смотрите какая клевая зеленая доска на заднем плане!)
Требуется прикрутить ножки (если нужно, то длинные), зарядить батарею, прикрутить пропеллеры, установить софт на андроид телефон или планшет, и немного танцев с бубном, чтобs откалибровать компас.

- Готовый к полету IRIS+;
- Ходовая батарея и зарядное устройство;
- Пульт управления и наземная станция;
- Набор шасси;
- Набор инструментов;
- Инструкция и предполетный «чеклист»;
* FPV комплект, подвес для камеры и камера не входят в стоимость.
Мужик объясняет американцам как собрать «ириску»
(Смотрите какая клевая зеленая доска на заднем плане!)
Требуется прикрутить ножки (если нужно, то длинные), зарядить батарею, прикрутить пропеллеры, установить софт на андроид телефон или планшет, и немного танцев с бубном, чтобs откалибровать компас.

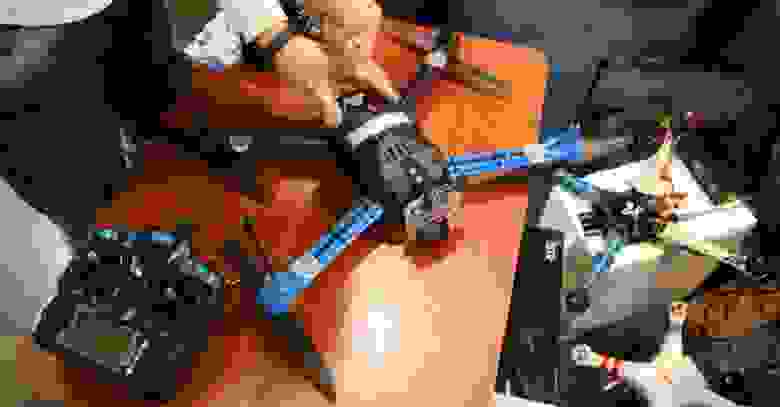
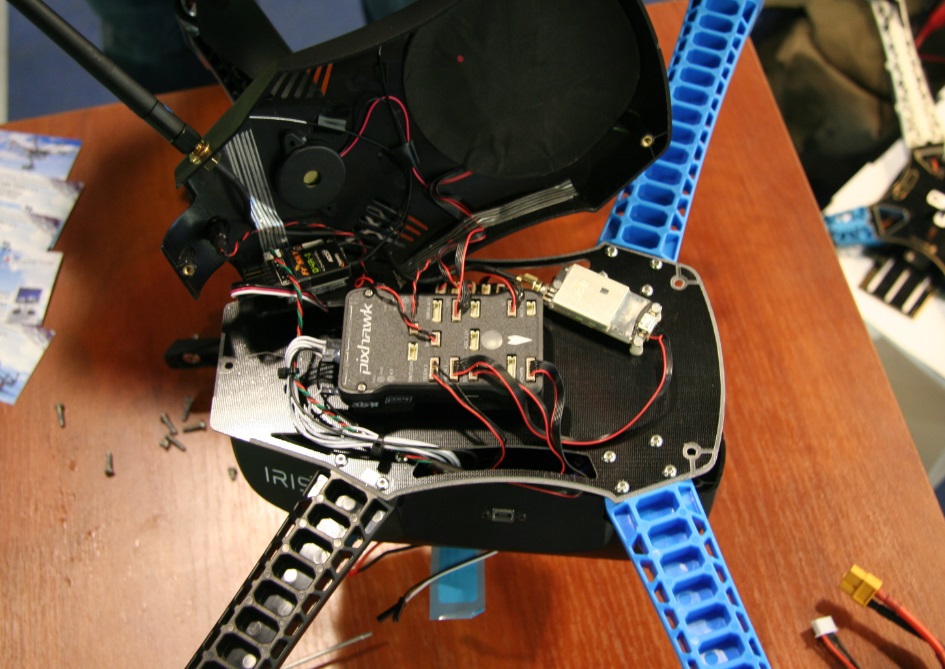
Как мы его разбирали на выставке
Под капотом: регуляторы оборотов (ESC) в объединены на одной плате.

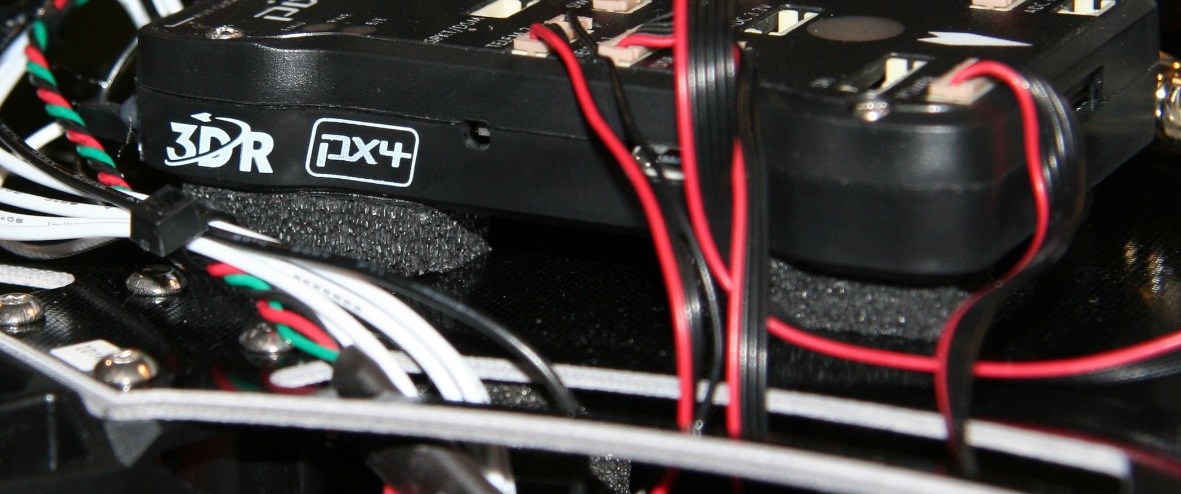
Под капотом с другой стороны. Pixhawk(открытый и свободно разрабатываемый проект автопилота высокого класса, который применяется в хоббийном, академическом и профессиональном сообществом (по BSD лицензии) при низких затратах и высокой доступности) представляет собой развитую систему автопилота проекта PX4 с открытым аппаратным исходниками и изготавливаемым 3D Robotics. Он имеет передовой процессор и датчики от ST Microelectronics и операционную систему реального времени NuttX. Pixhawk имеет интегрированную многопоточность, в Unix/Linux-подобную среду программирования, совершенно новые функции автопилота, таких как Lua Scripting миссий и поведений полета, и слой специального PX4 драйвера обеспечивая плотное время во всех процессах.
Pixhawk является высокопроизводительным автопилотом в одном модуле, подходит для установки в крыло, квадрокоптер, вертолет, автомобили, лодки и любую другу роботиризированную платформу, которая может двигаться. Автопилот позиционируется как высший класс любительских, исследовательских и отраслевых потребностей и является модулем «все в одном» сочетая PX4FMU и PX4IO.

Для уменьшения вибрации PIXHAWK закреплен на вспененные полосы
===============

(фотка с официального сайта)
Очень тихие и малопотребляющие моторы. Хорошая балансировка. Интересная особенность — мотор со всех сторон закрыт, то есть находится внутри луча и защищен от внешних воздействий типа падения. Моторы имеют нестандартное крепление для пропеллеров — там реализована как на фантоме правая и левая резьба, то есть пропеллеры самозатягивающиеся, но диаметр вала другой, так что от фантома пропеллеры не подойдут

Пропеллеры и телеметрия
в качестве платформы используется старый пульт Turnigy 9x. Но он был доработан. Стандартная прошивка заменена на
кастомную 9XR, позволяющую проводить более глубокие настройки, нормально назначать переключатели и поддерживающую вывод телеметрии. В качестве передающего модуля установлен FRSKY DJT с телеметрией, которая заведена внутрь пульта и отображается на дисплее. Очень удобно, что на самом пульте переделаны наклейки, подписаны функции переключателей

Проложить маршрут вокруг выставочного павильона в парке «Сокольники»
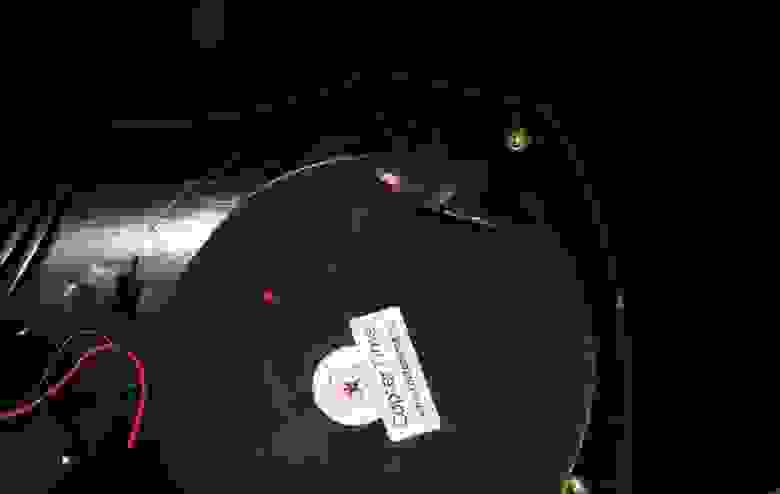
Усик антенны и экранирование. Под этой наклейкой находится GPS модуль — очень чувствительный к электромагнитным волнам, которые берутся из силовых проводов регуляторов. Для уменьшения воздействия на GPS есть 2 варианта — поднять как можно выше этот модуль на стойке — стандартно для самособранных аппаратов, но в этом случае он становится куда менее компактный и его очень легко сломать при падении, к тому же часто требуется вводить поправки на его положение, вариант номер два — поставить его внутрь корпуса, как тут или на «фантоме», но в этом случае требуется экранирование. чем лучше экранирование — тем меньше помех на GPS, лучше удержание, качественнее полет по точкам и больше шансов вообще вернуться домой в случае потери управления
Батареи хватает на 16(22) минут полета (полетное время зависит от нагрузки, ветра, высоты, температуры, влажности, стиля полета и навыков пилота)

Дисклеймер

Под капотом: регуляторы оборотов (ESC) в объединены на одной плате.
Под капотом с другой стороны. Pixhawk(открытый и свободно разрабатываемый проект автопилота высокого класса, который применяется в хоббийном, академическом и профессиональном сообществом (по BSD лицензии) при низких затратах и высокой доступности) представляет собой развитую систему автопилота проекта PX4 с открытым аппаратным исходниками и изготавливаемым 3D Robotics. Он имеет передовой процессор и датчики от ST Microelectronics и операционную систему реального времени NuttX. Pixhawk имеет интегрированную многопоточность, в Unix/Linux-подобную среду программирования, совершенно новые функции автопилота, таких как Lua Scripting миссий и поведений полета, и слой специального PX4 драйвера обеспечивая плотное время во всех процессах.
Pixhawk является высокопроизводительным автопилотом в одном модуле, подходит для установки в крыло, квадрокоптер, вертолет, автомобили, лодки и любую другу роботиризированную платформу, которая может двигаться. Автопилот позиционируется как высший класс любительских, исследовательских и отраслевых потребностей и является модулем «все в одном» сочетая PX4FMU и PX4IO.
Основные характеристики:
- 168МГц / 252MIPS Cortex-M4F
- 14 PWM / Серво выходов (8 с защитой отказа и ручного управления, 6 вспомогательных, высокой мощности)
- Обильные варианты подключения для дополнительных периферийных устройств (UART, I2C, CAN)
- Интегрированная система резервного копирования для восстановления в полете и ручного управления с выделенным процессором и автономным источником питания (в текущей версии платы 2.4.3 резервная батарея отсутствует)
- Резервные входы питания и автоматический переход
- Внешний аварийный выключатель
- Многоцветный LED — главный визуальный индикатор
- Мощный, многотональный индикатор пьезо-аудио
- MicroSD карта для регистрации с высокой частотой в течение длительного периода времени
Для уменьшения вибрации PIXHAWK закреплен на вспененные полосы
===============

(фотка с официального сайта)
Очень тихие и малопотребляющие моторы. Хорошая балансировка. Интересная особенность — мотор со всех сторон закрыт, то есть находится внутри луча и защищен от внешних воздействий типа падения. Моторы имеют нестандартное крепление для пропеллеров — там реализована как на фантоме правая и левая резьба, то есть пропеллеры самозатягивающиеся, но диаметр вала другой, так что от фантома пропеллеры не подойдут

Пропеллеры и телеметрия
в качестве платформы используется старый пульт Turnigy 9x. Но он был доработан. Стандартная прошивка заменена на
кастомную 9XR, позволяющую проводить более глубокие настройки, нормально назначать переключатели и поддерживающую вывод телеметрии. В качестве передающего модуля установлен FRSKY DJT с телеметрией, которая заведена внутрь пульта и отображается на дисплее. Очень удобно, что на самом пульте переделаны наклейки, подписаны функции переключателей

Проложить маршрут вокруг выставочного павильона в парке «Сокольники»

Усик антенны и экранирование. Под этой наклейкой находится GPS модуль — очень чувствительный к электромагнитным волнам, которые берутся из силовых проводов регуляторов. Для уменьшения воздействия на GPS есть 2 варианта — поднять как можно выше этот модуль на стойке — стандартно для самособранных аппаратов, но в этом случае он становится куда менее компактный и его очень легко сломать при падении, к тому же часто требуется вводить поправки на его положение, вариант номер два — поставить его внутрь корпуса, как тут или на «фантоме», но в этом случае требуется экранирование. чем лучше экранирование — тем меньше помех на GPS, лучше удержание, качественнее полет по точкам и больше шансов вообще вернуться домой в случае потери управления
Батареи хватает на 16(22) минут полета (полетное время зависит от нагрузки, ветра, высоты, температуры, влажности, стиля полета и навыков пилота)

Дисклеймер
Тестовый полет в Москве

в качестве платформы используется старый пульт — Turnigy 9x. Но он был доработан. Стандартная прошивка заменена на
кастомную 9XR, позволяющую проводить более глубокие настройки, нормально назначать переключатели и поддерживающую вывод телеметрии. В качестве передающего модуля установлен FRSKY DJT с телеметрией, которая заведена внутрь пульта и отображается на дисплее. Очень удобно, что на самом пульте переделаны наклейки, подписаны функции переключателей
еще фотки







Автоматическое планирование миссии
 Используя бесплатное приложение — DroidPlanner, пользователи IRIS+ могут составлять полетные задания просто рисуя миссию на любом Android планшете или смартфоне. Это позволяет осуществлять полностью автономные полеты с неограниченным количеством точек.
Используя бесплатное приложение — DroidPlanner, пользователи IRIS+ могут составлять полетные задания просто рисуя миссию на любом Android планшете или смартфоне. Это позволяет осуществлять полностью автономные полеты с неограниченным количеством точек.Безопасность полетов — IRIS+ может приземляться самостоятельно при разряде батарей или возвращаться в точку взлета, если достигнут установленный лимит расстояния или заканчивается заряд батареи.
GoPro

Изначально Ириска заточена под камеру GoPro, в комплекте даже крепление для нее имеется и можно приобрести дополнительный стабилизационный подвес.
Бесплатное и опенсорсное ПО
Полетный контроллер ArduPilot является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования — автоматическое управление по заранее созданному маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
APM разрабатывается сообществом DIY Drones и базируется на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.

APM:Copter

APM Planner 2.0
Сравнительная таблица автопилотов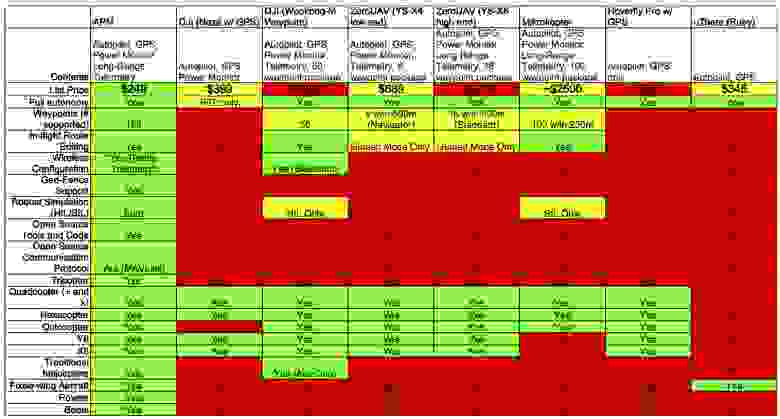


Брэнсон думает, как же сделать космических дронов из «исходников» 3D Robotics
P.S.
Фотки детей в костюмах асфальтоукладчиков
Делают ЛЕГО роботов

Играют в шахматы при помощи промышленного дельта-робота

Одноместный «танк»

Делают ЛЕГО роботов

Играют в шахматы при помощи промышленного дельта-робота

Одноместный «танк»
