Comments 74
Судя по длине волны на большую точность кривизны зеркала они не расчитывают.
Задача перекрыть диапазон, который на Земле слушать вобще невозможно…
Так его же в кратере собираются монтировать. А как известно, бомбы в одну и ту же воронку не попадают. (шучу. почти)
Крупное туда вряд ли попадет, а пара мелких дырочек особо не повлияют. И легко отремонтируются.
Пока размер дыр будет меньше λ/2, зеркало будет работать, как любезно подсказали ниже.
Более интересно, как его собираются строить. И из чего. Автономные роботы пока что умеют более-менее хватать разные предметы и медленно перемещаться по не очень пересечённой местности.
Объезжая яму, оператор не успел затормозить перед ямкой поменьше, аппарат набрал песка на солнечные панели и не смог его очистить.
Одно дело — сбить тётку на лисапеде, но даже в этом случае на «студента» свалить не получается. Другое — угробить проект в миллиарды долларов.
Трехсекундная задержка до Марса? Ну да, ну да. Вы бы хоть читали комментарии, на которые ответ пишите.
Даже при черепашьей скорости 3,6 км/ч, за секунду машина проезжает метр — сопоставимо своим размерам.
И да, марсоходы проехали очень мало именно из-за больших задержек сигналов управления.
Разница — 997 секунд, в 333.3(3) раза бОльшее время. Всегда пожалуйста.
С 2.564 секундами задержки в цикле "изменение ситуации — команда с Земли", вы можете поставить камеру на мачте (от одной до, например, трех (бинокуляр повыше и одну пониже)), сделать прекрасный SLAM, и сделать на Земле виртуальное "управление в будущем" (т.е. езда на этой местности этим же ровером, только через "три секунды после сейчас"), раскрашивая заодно для оператора пригодные маршруты/ не позволяя рулить в областях, размеченных, как опасные.
Задача автономной части 1) вести машину в соответствии с этим управлением, и 2) ловить дифф между предсказанием модели ровера и реальной ситуацией, и либо вносить поправки, либо, если различия существенны/опасны — делать "стоп"(остановку), или исправляющее воздействие и остановку, и ждать новой команды с Земли. На Земле после "стоп" произойдет синхрон, возврат виртуальной модели из будущего в точку останова.
И да, вовсе не требуется мега-скоростей, метр в секунду — много? Сбросим в 3 раза, метр за 3 секунды; 1200 метров в час. За глава хватит.
На такой скорости исправление разницы предсказания модели на модели грунта с одной стороны, и реальных показателей с другой, может состоять из "дать задний ход (на 3 секунды назад) и остановиться".
На счёт SLAM, кстати, напомните, почём нынче радстойкие GPU для народа, сколько они жрут лепестричества, и как их охлаждать в вакууме.
PS. Я к тому, что всё равно планируют строить лунную базу на полюсе, в чём проблема прислать туда пару органических операторов? Какую-то спутниковую связь «с той стороной Луны» всё равно придётся делать, и очевидно она будет замкнута в том числе и на лунную базу.
На счёт SLAM, кстати, напомните, почём нынче радстойкие GPU для народа, сколько они жрут лепестричества, и как их охлаждать в вакууме.
— ну вот вы уже и торгуетесь.
А ведь еще недавно вы топили за [можно] «только вручную!» (ибо «НАСА же не дураки,
Если у вас (именно у вас, заметим) такие проблемы с «сделать full onboard SLAM», это решается просто — SLAM делается на Земле, 3D-карта, привязка к координатной сетке, все дела; на ровер посылается параметризация модели (с минимальной картой для оной модели). Координаты (субсантиметр!) ровер и может и без бортового SLAM получать.
А теперь склон оказался из песочка, который вместе с ровером поплыл вбок. Обвал, короче. И?..
— если есть алгоритм поведения в данной ситуации — бортовая система применяет его (еще раз, как только реальные параметры начинают расходиться с ожидаемыми (пересланными по Земли + расчитанные из модели), автоматика делает freez, или исправление и freez; где исправлением может быть «стоп», либо «стоп и откат назад», например. Такая схема позволяет быструю езду, когда надо, и коррекцию ситуации, когда реальность расходится с ожиданиями. Кроме того, в этой схеме ничего не мешает понизить скорость в особо ответственных/ опасных участках до любой требуемой.
Я к тому, что всё равно планируют строить лунную базу на полюсе, в чём проблема прислать туда пару органических операторов?
1) спасибо, Кэп, мы бы сами не догадались задейстовать операторов, находящихся к роверам ближе, чем операторы с Земли, если бы такие вдруг оказались поблизости! Спасибо, что подсказали!
2) Да? А точно «к тому»? А мне помнится, что вы писали проблематизации (а точнее то, что вам таковыми казалось!) утверждения о том, что сделать такую систему реально.
Что же касается моей скромной персоны, то я в отрасли давно не работаю, но когда работал — занимался именно SLAMом, хотя такого слова ещё не было. Но задача решалась та же — картографирование с одновременной привязкой координат, только у нас скорости были на 3 порядка выше.
Разумеется, эталонные карты подготавливаются, обсчитываются и загружаются в машину перед пуском, как и планируемый маршрут.
Но вот беда — рельеф имеет привычку меняться. На Земле это смена времён года в первую очередь, но и хороший ливень может внезапно всё изменить. На Луне — тот факт, что песок там ничем не обдувается и лежит под критическим углом осыпания, буквально тронь — и он плывёт. И вот во втором случае критически важна скорость реакции. Ну это как водитель, попавший в занос на обледенелом повороте — опытный вырулит (не тормозя в пол, не сдавая назад, а, вероятно, даже с прогазовкой), неопытный же начнёт дёргаться и улетит в кювет с переворотом и тоталом.
Короче, в отличие от вас, я немного представляю масштабы проблемы, и мне немножко смешно читать про «студентов, которые всё сделают». Для Марса пока не сделали.
Для Марса пока не сделали.
— OMG, ШТО, ОПЯТЬ? «На колу мочало, начинай сначала»?
Я вам напомню: Марс НЕ находится на расстоянии, дающем трехсекундную (2.564 секунды мин) задержку в цикле удаленного управления. Постарайтесь не возвращаться в нашем разговоре к этому, пожалуйста.
Разумеется, эталонные карты подготавливаются, обсчитываются и загружаются в машину перед пуском, как и планируемый маршрут.
Но вот беда — рельеф имеет привычку меняться.
— и какое это имеет отношение к обсуждаемой схеме? Ровер с вынесенной вверх камерой (а анкерный ровер именно такой) передает в реальном времени картинку на Землю, там строится 3D-карта. В реальном (t-1.282 сек) времени. Если хотите высокой скорости проезда, работа устроена так: водитель едет в построенной карте, в «t+1.282 сек», ровер пытается повторить. Когда происходит достаточно серьезный рассинхрон, — стопорится, и система «сбрасывает» виртуальный ровер к реальному.
Никаких «автоматически сдать назад» быть не может,
— В 21-м году 21-го века беспилотные авто наездили уже миллиарды километров, этот вопрос закрыт, и закрыт совершенно не так, как вы это пытаетесь здесь продать.
И вам даже не нужен автопилот уровня Tesla! Вам нужна лишь система, которая
1) на стороне Земли (по получаемому видео, + показаний датчиков ровера) строит карту, и при этом маркирует потенциально опасные участки,
и
2) ведет ровер по намеченному маршруту (целевая точка — в t+1.282 сек. находится, не ахти какой большой отрезок),
и
3)… и в случае рассинхрона (целевых указаний (параметров) и реально получаемых в результате попыток следования им) — обеспечивает безопасность ровера (совершает «маневр обеспечения безопасности»).
Не надо «прохладных историй» про невозможность это сделать. Сделайте «песочницу» на физ. движке, нагенерите «moonшафтов» для нее, и дайте нейросеткие погонять ровер по ним в ней. Сперва в режиме online-управления, а после в требуемом нам для управления ровером на Луне режиме, имитируя его, только с такой вот виртуальной Луной, т.е. в режиме, «одна сетка рулит, другая решает задачи п.2 и п.3.». Этакое «Alpha Go для решения задач управления ровером». Задача — сделать сетку, которая задачу 3, а лучше — 2 и 3 способна решать.
Полученную сетку максимально контрастируем (сокращаем ее размер без существенной потери способностей к решению задачи). Если все сделать правильно (см. предыдущие комменты), это будет до смешного маленькая сетка.
И это лишь один из возможных вариантов. Есть решения еще проще.
Что касается рассказов про «да я этим занимался еще до того, как занятия придуманы были!...» с перечислением трудностей, которые решатели сами же себе создали, закачивающиеся словами "… так и не сделали" — это не доказывает ничего, кроме того, что именно эти решатели это сделать не смогли (теми способами и инструментами, которыми пытались). Это ничего не говорит о нерешаемости задачи.
Сейчас вообще не проблема такие ямы поменьше распознавать и автоматически тормозить, требуя подтверждения оператора на движение вперед.
Увидел препятствие — остановился. Для этого даже сетка не нужна. Не обязательно же видео распознавать. лазером расстояние сканируешь. Передние колеса опять же могут чувствовать что под ними ничего нет.
Луноход он ездит не на 60 км/час.
На физ. моделях.
В 17:18
Самоходное шасси испытывалось и на наклонной плоскости
Это и есть 1/6g.
Развернуть конструкцию размерами в сотни метров не сильно проще, чем собрать по частям.
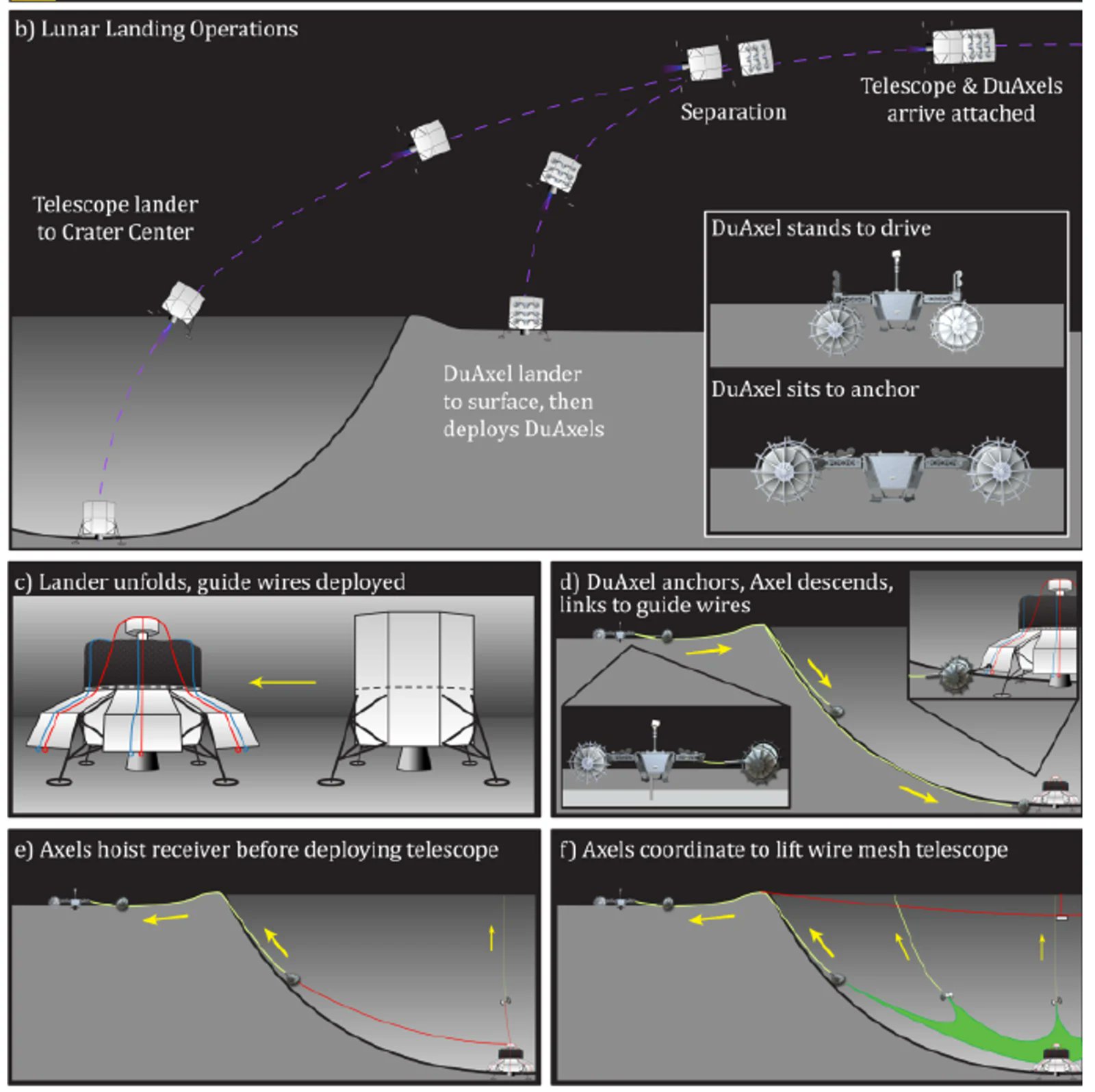
а вот тут есть видео, которое показывае это в динамике (все детали процесса, включая схему разворачивания сетки), а так же испытания полномасштабного робота — якоря, — поездки и спуска «модуля-на-привязи» по стенке (видео при воспроизведнии будет спозиционировано на начале объяснения способа разворачивания, все вышеописанное (испытание робота, схема разворачивания сети) идет следом):
Можете показать, какой этап этого процесса вы оцениваете как сравнимый по сложности со сборкой (то самое ваше «не сильно проще, чем собрать»)?
какой этап этого процесса вы оцениваете как сравнимый по сложности со сборкой
Любой. Нужны роботы-альпинисты (по такому склону, как на картинке, никакой существующий луноход (марсоход) не поднимется. Нужны роботы-трактора, мощные и тяжелые, чтобы тягать тросы. Нужны роботы-бурильщики, чтобы зафиксировать на чем-то эти тросы.
Что из этого списка существует в железе? Да, роботов-монтажников тоже нет.
А так, задача несложная. Как слона в холодильник посадить. Открыть холодильник, посадить внутрь слона, закрыть холодильник :D
То есть
1) вы не дали себе труда ни разобраться в схеме, представленой на второй раз данном вам рисунке, ни посмотреть видео
НО
2) НО это не остановило вас от выдачи своей Особо Ценной Экспертизы, относящейся, ввиду п.1, к обсуждаемому проекту, как "в огороде бузина" относится к "в Киеве дядьке". Что вами, ввиду п. 1, очевидно не осознается.
То есть вы совершенно бессовестно потратили мое время, излагая анализ ВАШЕГО креатива о том, как убого вы бы реализовали решение подобной задачи(a), под видом того, что обсуждаете совершенно конкретный проект NASA(b).
Не делайте так больше в разговоре со мной, будьте так любезны.
Роботы не карабкаются по склону, а спускаются на тросе (одна из пар колес анкерного робота, точнее) с верхней кромки кратера анкерным роботом.
Этот анкерный робот есть, и прекрасно справляется с задачей на Земле, это есть в видео.
Никаких "роботов — монтажников" нет и не требуется, эта спускаемая пара колес спускается на тросе, подъезжает к модулю в центре кратера, и подцеплят трос к своей тяге свернутой (особым образом, таким, что может быть безопасно развернута) сетки (а часть — к тросам подвески ресивера). И так с каждой из сторон делают спускаемые на тросах двухколесые модули от каждого из анкерных роботов. После тросы ресивера, а затем и сетка натягиваются. Все.
Все это есть на рисунке — схеме, которая есть и в посте, и в комментарии, что я послал вам.
__________
"Роботы-альпинисты", "роботы-монтажники", "роботы-бурильщики", "слон в холодильнике", OMG!
Стыд-позор.

Не знаю как там у вас на Луне, а на Земле вокруг метеоритного кратера получается вот такой кольцевой бугор. Через него нужно будет перебраться. Что вытянет наверх бугра робота-анкера? Робот-альпинист который не нужен?
И меня немного смущает геометрия. Цепная линия — не парабола. Это зеркало будет что-то куда-то отражать, собственно вот и всё. Существует ли точка, в которой можно повесить приемник? Бывает ли кратер, на краях которого можно с помощью троса можно закрепить приемник, чтобы он оказался в фокусе? В Аресибо, например, использовали мачты.
А так концепция забавная, чем-то напоминает экспериментальные танки WWW-1 с огромными колесами.
________
* — (на самом деле это относится даже к приведенному вами фото Аризонского кратера (Barringer Crater):
 — обратите внимание на шкалы, и вычислите максимальные углы наклона; сюрприз-сюрприз! Впрочем, это можно было и из фото увидеть)
— обратите внимание на шкалы, и вычислите максимальные углы наклона; сюрприз-сюрприз! Впрочем, это можно было и из фото увидеть)Вот вам профиль одного из кратеров-кандидатов для LCRT:

(источник)
А если вы говорите про этап «вернуться обратно», который мы видим на этапе e) и f) схемы разворачивания
— то ответ еще проще: — спускаемая часть робота — САМОХОДНАЯ, а трос может как разворачиваться, так и сворачиваться, вы уже посмотрите видео, наконец-то! Я его вам даже на показе этой операции спука — подъема спозиционировал, натурные испытания!
И меня немного смущает геометрия. Цепная линия — не парабола. Это зеркало будет что-то куда-то отражать, собственно вот и всё.
— тонкое набюдение, вот только у нас не свободно свисающая однорадная нить/ цепь, а _сетка_. У нее, например, радиальные кольца есть.
В работе «Conceptual Design of the Lunar Crater Radio Telescope
(LCRT) on the Far Side of the Moon» вы нейдете несколько страниц вычислений и иллюстрирующих схем, показывающих, как они добиваются параболической формы.
Бывает ли кратер, на краях которого можно с помощью троса можно закрепить приемник, чтобы он оказался в фокусе?
— бывает, в видео выше привели 5 кратеров-кандидатов:

Ну, ок. Уговорили. Чтобы заехать на вершину бугра, достаточно вездехода. Допустим, они уже существует. А с сопроматом что-то нового уже придумали? Сколько весит трос, способный удержать хотя бы самого себя, при длине 6 км? В земных условиях, допустим, 1 км. Всего лишь в 3 раза больше чем Аресибо. И к конструкции анкеров появляются вопросы. На Земле крепление километрового троса - это бурение, бетон, много стали.
Вы утомили. Вы не читаете данных вам схем (дважды!), не смотрите данных вам видео, не читаете данных вам статей с расчетами и обоснованиями, вместо этого всякий раз вытаскиваете какие-то совершенно неадекватные до уровня детской глупости возражения, которых бы не случилось, прочти вы данную вам схему, посмотри вы данное вам видео, просмотри вы данную вам статью с расчетами и обоснованиями.
И всякий раз вас это не смущает, не заставляет изменить поведение, то есть рефлексии не случается. Шариковщина какая-то, демонстрация эффекта Даннинга-Крюггера на глазах у изумленной публики.
Я не буду больше отвечать вам на вопросы, ответ на который вы могли бы найти В ПРЕДОСТАВЛЕННЫХ МНОЙ ВАМ МАТЕРИАЛАХ, _дай вы себе труд взглянуть на них_. Попробуйте _измениться_, ваше взаимодействия с реальностью сейчас ниже всякой критики.
Это же дно днищевое, прямой косплей анекдота "папа, где море?!??", — какие то фантазии о способе развёртывания, когда ему дважды в нос его схему тычут, какие-то "мужики выражають сомненье!", когда вот он, профиль кратеров, какие-то "предположим, он существует", после ТРЕХ раз демонстрации видео (и одной ссылки из статьи, чуть ли не первой в статье!), где этот робот не только показан, но и показано его функционирование!
И всякий раз непробиваемая, железобетонная уверенность в том, что Я Могу Походя Проблематизировать большую работу целой научной группы, одобренную NASA, Вот Так Вот, Просто Походя, Детскими Вопросиками(!), при том НЕ ИСЧЕЗАЮЩАЯ даже после того что вас с этими "проблематизациями" СЕРИЙНО садят в лужу, раз за разом!!!!
.
.
.
.
Ни малейшего признака рефлексии, мысли "гм... а может здесь, в этой схеме действий, что-то не так?"
.
Офигеть. Не думал, что доведется встретить такое в реальности.
Прочтите уже статью, посмотрите видео. Я могу привести лошадь к водопою, но поить ее в стиле "мама поит птенца" мне уже надоело
Это же дно днищевое
Спасибо, одна эта формула заменяет весь матан, сопромат и даже видео ;) Сразу видно человека, глубоко разобравшемуся в этой теме :D
Не напрягайтесь, я не собираюсь покупать у вас эту штуку и не сбиваю цену.
Я Могу Походя Проблематизировать большую работу целой научной группы, одобренную NASA, Вот Так Вот, Просто Походя, Детскими Вопросиками(
Когда показывают мульфильм от Роскосмоса — это сразу фу. Мультфильм он NASA — это сразу ВАУ, так что ли? Не поверите, лажать ухитряются даже в проектах на миллиарды тонн денег.
Вы серийно лажаете, лажаете, лажаете, несете чушь, чушь, чушь, при том этого не случилось, читай вы то, что вам пишут, пишут, пишут, на что вам дают ссылки, ссылки, ссылки. И у вас это не вызывает рефлексии, не вызывает рефлексии, не вызывает рефлексии.
Вместо того, чтобы осознать себя серийно лажающим дурачком, вы выдаете себя Крутым Проблематизатором. Даже при том, что я КАЖДЫЙ РАЗ садил вас в лужу, а точнее показывал, что вы в неё всякий раз садились.
Прочесть статью, ссылку на которую я вам дал, слабо, Шариков?
Рукалицо.jpg
Ну, ок. Уговорили. Чтобы заехать на вершину бугра, достаточно вездехода.
— спасибо за Оказанную Честь уговорить Вас, что на преодоление десятиградусного в самой крутой своей части подъема не требуется робот-альпинист!
Вот еще пример детсадовских проблематизаций:
Бывает ли кратер, на краях которого можно с помощью троса можно закрепить приемник, чтобы он оказался в фокусе? В Аресибо, например, использовали мачты.
— "вопросик" про фокус параболы к конструкции, которая подвешивается внутри большого кратера, на основании того, что в Аресибо парабола, занимающая ВЕСЬ кратер, имеет фокус ВНЕ кратера. Рукалицо.
То есть никакних «каменюк, сыплющихся на поверхность» там не будет. Пыль тоже идет побоку.
КАКАЯ вероятность? "Цифру, цифру, сестра!"
Сколько кратеров на единицу площади ЗА КАКОЕ ВРЕМЯ? Какой средний возраст этих кратеров, какая дисперсия?
вероятность попадания есть , но она крайне мала...И даже если телескоп прослужит всего лишь лет десять , все будут рады...
Так что со временем на обратной стороне Луны будут радиопомехи и фон.
Интересно, а можно ли будет совместить этот лунный и какой-нибудь космический или даже наземный телескоп, чтобы улучшить качество сигнала? Если ученые говорят, что чем больше - тем лучше.
Радиотелескоп на обратной стороне Луны: зачем он там нужен и чем поможет науке