One of the main tenets of the Unix philosophy is that a good tool for a good cause. Suppose you have a task to develop a large application that should have multiple threads of execution, possibly be distributed and, of course, have a graphical interface. I would like to make such a program quickly and without unnecessary mistakes.
I think the first question to ask in a situation like this is, "Which programming language is right?" C is not a bad choice, but not for such a project. It does not scale very well, and does not have the means of working with processes at all. Then C++? But C++ is a complex language, and past experience has shown that it will take a fair amount of time to debug memory allocation problems. What else?
There is a well-designed tool for just such a job. It is a Modula-3 language developed and implemented by the Digital Equipment Corporation Systems Research Center (SRC). Modula-3 is a modern, modular, object-oriented language. Other features include automatic memory management (built-in garbage collector), exception handling, support for dynamic types, and multi-threaded programming.
The SRC implementation includes a compiler, a minimal recompilation system (m3build), and a wide range of libraries and sample applications. It must be said that SRC Modula-3 is a free system supplied with source code, including a compiler and a run-time kernel. In addition, SRC Modula-3 has been implemented for a dozen platforms, including Windows 95/NT.
The goal of the developers of the language, in their own words, was not innovation, but the careful selection and consolidation of ideas, time-tested and proven to be useful in practice. Modula-3 is a simple but full-featured language for building large and reliable software packages with a long life cycle.




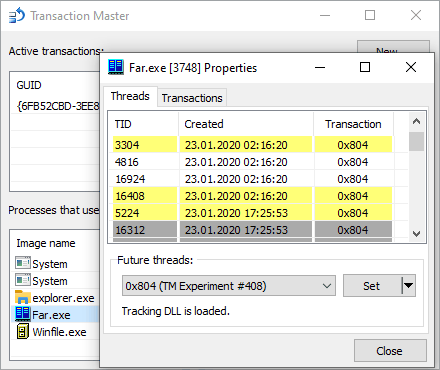 One of the modules in the Windows kernel provides support for combining a set of file operations into an entity known as a transaction. Just like in databases, these entities are isolated and atomic. You can make some changes to the file system that won't be visible outside until you commit them. Or, as an alternative, you can always rollback everything. In any case, you act upon the group of operations as a whole. Precisely what needed to preserve consistency while installing software or updating our systems, right? If something goes wrong — the installer or even the whole system crashes — the transaction rolls back automatically.
One of the modules in the Windows kernel provides support for combining a set of file operations into an entity known as a transaction. Just like in databases, these entities are isolated and atomic. You can make some changes to the file system that won't be visible outside until you commit them. Or, as an alternative, you can always rollback everything. In any case, you act upon the group of operations as a whole. Precisely what needed to preserve consistency while installing software or updating our systems, right? If something goes wrong — the installer or even the whole system crashes — the transaction rolls back automatically.