Часть 1 | Часть 2 | Часть 3 | Часть 4
Наполеоновские планы, описанные в предыдущих частях, оказались практически неосуществимыми моими далеко не ровными руками и скудными силами двух-трех человек. Поэтому, вдохновившись одной из дельных мыслей книги ReWork, я решил все же собрать летающий аппарат. Максимально быстро и с минимумом усилий на этот раз.

Но не тут-то было.
Из огромного количества готовых проектов больше всего мне понравился немецкий, особенно учитывая, что на нем же остановился Андрей, основатель и вдохновитель сайта большого русскоязычного сообщества любителей мультикоптеров. Какие еще потребуются детали, я приблизительно описывал в предыдущих частях. Соберем все воедино, добавив конкретики:
1. Цены приблизительные, зависят от того, где и сколько деталей брать.
2. В зависимости от того, сколько моторов предполагается в аппарате плюс один-два запасных.
3. Отличаются мощностью и дополнительными плюшками. Если я правильно понял, дополнительные плюшки контроллеров V2.0 нам не нужны, а мощность V1.2 можно нарастить, заменив прошивку и мосфеты.
4. К нему понадобится купить или спаять PPM-преобразователь. Есть и другой передатчик, но его нет в наличии.
* — опциональная деталь.
Итого: 1415$ — 1905$.
Если остались еще деньги, можно докупить навигационных модулей: магнитный сенсор, навигационная плата и GPS (90$+170$+112$). На самом деле, верхний потолок цен практически не ограничен. Можно заказать сверхпрочный углепластиковый корпус, трехкилограммовые мотороы на 20 лошадиных сил и склепать мультикоптер, способный поднять в воздух сотню кг… Но что-то я замечтался.
Итак, предположим, детали к нам благополучно приехали (ох не за один раз это было! Хорошо хоть без растаможки). Приступим к сборке. Дальнейший материал будет тесно перекликаться с сайтом Андрея, на котором есть огромная куча статей по отдельным деталям и сборке в частности, так что для расширения кругозора можно поглядывать и туда.
Чем-то мне не понравилась классическая центральная пластина круглой формы и профили квадратного сечения, так что я запасся алюминиевыми пластинами (толщина 1,5-2,5 мм, цена 5$ за 900 см², да, чуть-чуть грязный), алюминиевыми трубами (внешний диаметр 10 мм, толщина стенки 1 мм, цена 4$ за 2 м), бумагой и фантазией.
Меряем плату-адаптер для контроллеров моторов и крепление моторов и рисуем зачем-то в Компасе:
Несмотря на то, что крепление моторов к несущим трубам довольно простое, пришлось изрядно попотеть, выпиливая из алюминиевой пластины площадки:

Также сложно сверлить в трубах отверстия строго перпендикулярно трубе. Для этого нужно где-то раздобыть специальное устройство, которого я не нашел, поэтому получилось кривовато. С этой точки зрения было бы правильней использовать алюминиевые профили квадратного сечения, хотя и поговаривают, что круглая труба лучше гасит вибрацию.
Центральная пластина моего авторства, трубы крепятся между двух таких пластин и прокладок из микропоры:

Кусочек рамы в сборе. Вес с моторами 700 г, гашение вибраций замечательное, пока неплохо.

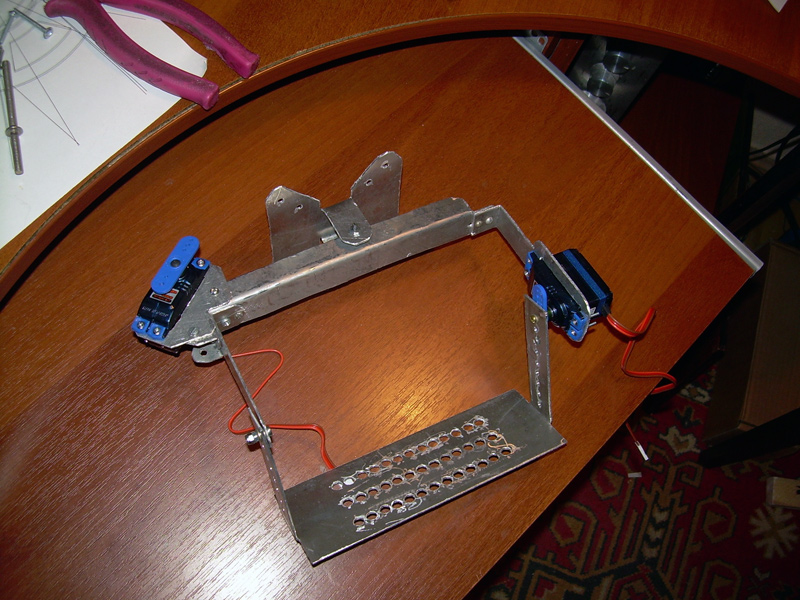
Очень важный урок, который я вынес из недель выпиливания и килограммов стружки: «на коленке» такие вещи не делаются, нужно искать профессиональное оборудование. Ну или у меня просто руки из жопы. Параллельно с этой мыслью ко мне пришла информация, что уже давно существуют конторы, которые лазером режут из металла все, что нарисуешь, причем относительно недорого (~4,3$ за метр реза в наших широтах). Вдохновившись, я прикинул «выкройку» подвеса камеры, чтобы вырезать заодно с другими деталями:


Рисовать в АвтоКаде было просто сказочно удобно и увлекательно, не думаю, что найдется инженерная CAD лучше этой. Однако меня ждало разочарование: в конторе лазер перестал брать дюраль толще 1,5 мм. А по ощущениям от ощупывания этого дюраля, полутора миллиметров явно не хватало. Пришлось снова самому, и снова ручками:


При проектировании своего варианта рамы, нужно сразу предусмотреть места крепления всех компонентов, иначе потом это вылезет боком, придется лепить детали куда попало.
Еще по поводу подвеса камеры. Мне не удалось сделать нормальный подвес, получилась монструозная конструкция с немаленьким люфтом. У сервомашинок не хватает силы двигать этот подвес, поэтому даже ненагруженный, он наклоняется рывками. Надо делать с редуктором. И вообще, на мой взгляд, это самая сложная деталь аппарата, ее нужно тщательно спроектировать и изготовить на профессиональном оборудовании.
Еще про рамы можно почитать на сайте Андрея и на форуме там же. Надо заметить, на этом форуме много замечательных идей, их только нужно поискать.
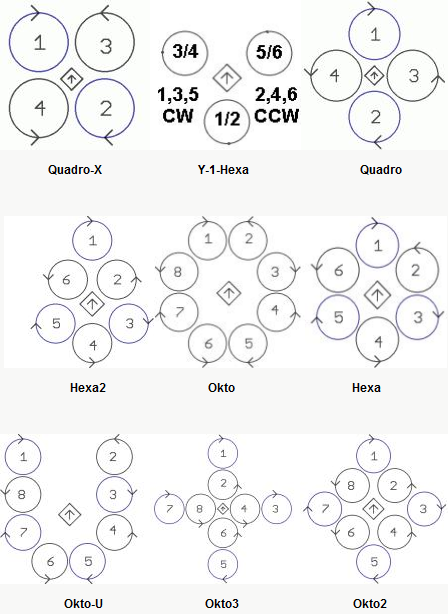
Вся информация довольно детально описана тут, от себя лишь добавлю, что довольно удобно было купить провода двух цветов, и припаивать по очереди комбинации ч-к-ч — к-ч-к, а затем припаивать к белому и черному проводам мотора один цвет, а к красному — другой. В таком случае, моторы крутятся в противоположных направлениях, через один. Однако не спешите нагревать термоусадочную трубку, пока не проверите, в правильную ли сторону крутятся моторы. Для того, чтобы мотор крутился в другом направлении, достаточно поменять местами любые два провода.
Для начала припаяем шесть контроллеров к распределительной плате (впрочем, это необязательно, можно контроллеры располагать ближе к моторам, но тогда необходимо предусмотреть крепления для них), к соответствующим контактным площадкам провода 12AWG (с разъемом для батареи, соблюдая полярность), а к выходам контроллеров провода 16AWG. Адресные площадки оставляем пока нетронутыми.


 К главной плате нужно припаять разъемы для сервомашинок (3,4,8) и связи с компьютером(1), провода питания (уже от распределительной платы, 14 и 16), шину i2c (9), ведущую к распределительной плате и приемник (13, или 11). Полная информация тут и тут. И еще, про приемник. Вместе с главной платой я сразу купил радиомодемы, это очень удобно. Их нужно спаять и настроить в точности по этому или этому руководству.
К главной плате нужно припаять разъемы для сервомашинок (3,4,8) и связи с компьютером(1), провода питания (уже от распределительной платы, 14 и 16), шину i2c (9), ведущую к распределительной плате и приемник (13, или 11). Полная информация тут и тут. И еще, про приемник. Вместе с главной платой я сразу купил радиомодемы, это очень удобно. Их нужно спаять и настроить в точности по этому или этому руководству.
Мультикоптер, на самом деле, уже почти готов. Осталось собрать воедино раму, распределительную плату, главную плату, прикрепить радиомодем, батарею и приемник. Настройка параметров замечательно описана на сайте Андрея тут и тут, так что я не вижу нужды переписывать это руководство еще раз.



Ноги пришлось делать уж совсем из чего попало, но это не критично. В итоге, вышла не особо внушающая доверие конструкция, однако она неплохо себя показала на испытаниях.
Спустя месяцы (не)плодотворной работы и перепаивания неправильно припаянных проводов, настал час «Ч». Относительно безветренное морозное утро — прекрасный день, чтобы угробить почти две тысячи долларов.




Управлять летающим аппаратом с непривычки очень сложно. Особенно, когда он кривовато собран, а в автопилоте не настроены соответствующие коэффициенты. Испытания нужно было проводить с привязанным мультикоптером, ну или хотя бы включить контроль высоты, что я сделать забыл. В итоге, аппарат взмыл в небо, а оттуда его понесло на зазевавшегося на испытание прохожего. К этому времени я уже совершенно не понимал, в каком направлении смотрит бортовая плата, и мягко посадить аппарат не удалось. Впрочем, мне снова повезло, и повреждения оказались небольшими: сломана одна несущая труба, ноги мультикоптера, и отбиты почти все пропеллеры.


Теперь предстоит немного переделать раму, предусмотрев защитный каркас, ноги и прочее, а после этого — еще пару испытаний, на этот раз осторожнее. Кроме того, вопрос с подвесом камеры остается открытым.
Прошу прощения за несколько сумбурный и скомканный стиль изложения, под конец оказалось, что большинство информации довольно детально описано на других сайтах, а мои собственные «достижения» относятся скорее к исправлению собственных же ляпов, и внимания не заслуживают.
Спасибо, что летали нашими авиалиниями.
Наполеоновские планы, описанные в предыдущих частях, оказались практически неосуществимыми моими далеко не ровными руками и скудными силами двух-трех человек. Поэтому, вдохновившись одной из дельных мыслей книги ReWork, я решил все же собрать летающий аппарат. Максимально быстро и с минимумом усилий на этот раз.
Но не тут-то было.
Детали
Из огромного количества готовых проектов больше всего мне понравился немецкий, особенно учитывая, что на нем же остановился Андрей, основатель и вдохновитель сайта большого русскоязычного сообщества любителей мультикоптеров. Какие еще потребуются детали, я приблизительно описывал в предыдущих частях. Соберем все воедино, добавив конкретики:
| компоненты | где брать | сколько | почем 1 | за все |
|---|---|---|---|---|
| Моторы | 700kV или 860kV | 7-82 | 12$-16$ | 85$-130$ |
| Контроллеры моторов | V1.2 или V2.03 | 6 | 56$-76$ | 336$-456$ |
| Пропеллеры | 10х4,5 или 12х4,5 | >16 | 2,7$-3,7$ | 40,5$-55,5$ |
| Батареи | 5000mAh 3S1P | 2-4 | 28$ | 56$-112$ |
| Зарядник | IMAX B6 | 1 | 28$ | 28$ |
| Пульт и приемник | простой4 или покруче | 1 | 66$-190$ | 66$-190$ |
| Коннекторы | с золотым покрытием | десяток | 4$-6$ | 4$-6$ |
| Провода | 12AWG и 16AWG | 2 м + 7м | 2,5$; 1,4$ | 15$ |
| Главная плата | Flight-Ctrl V2.1 | 1 | 485$ | 485$ |
| USB-адаптер | MK USB | 1 | 25,5$ | 25,5$ |
| Материалы для рамы | в магазинах, на рынках | - | 20$-50$ | 20$-50$ |
| Сервомашинки | неплохие и еще лучше | 2-3 | 23$-47$ | 46$-140$ |
| Плата для контроллеров | Hexa power distribution board* | 1 | 35$ | 35$ |
| Радиомодемы | Wi232 + Adapter board* | 2 | 67$ | 134$ |
| Видеолинк | 900MHZ 100mW +camera* | 1 | 47$ | 47$ |
2. В зависимости от того, сколько моторов предполагается в аппарате плюс один-два запасных.
3. Отличаются мощностью и дополнительными плюшками. Если я правильно понял, дополнительные плюшки контроллеров V2.0 нам не нужны, а мощность V1.2 можно нарастить, заменив прошивку и мосфеты.
4. К нему понадобится купить или спаять PPM-преобразователь. Есть и другой передатчик, но его нет в наличии.
* — опциональная деталь.
Итого: 1415$ — 1905$.
Если остались еще деньги, можно докупить навигационных модулей: магнитный сенсор, навигационная плата и GPS (90$+170$+112$). На самом деле, верхний потолок цен практически не ограничен. Можно заказать сверхпрочный углепластиковый корпус, трехкилограммовые мотороы на 20 лошадиных сил и склепать мультикоптер, способный поднять в воздух сотню кг… Но что-то я замечтался.
Итак, предположим, детали к нам благополучно приехали (ох не за один раз это было! Хорошо хоть без растаможки). Приступим к сборке. Дальнейший материал будет тесно перекликаться с сайтом Андрея, на котором есть огромная куча статей по отдельным деталям и сборке в частности, так что для расширения кругозора можно поглядывать и туда.
Рама и подвес камеры
Чем-то мне не понравилась классическая центральная пластина круглой формы и профили квадратного сечения, так что я запасся алюминиевыми пластинами (толщина 1,5-2,5 мм, цена 5$ за 900 см², да, чуть-чуть грязный), алюминиевыми трубами (внешний диаметр 10 мм, толщина стенки 1 мм, цена 4$ за 2 м), бумагой и фантазией.
Меряем плату-адаптер для контроллеров моторов и крепление моторов и рисуем зачем-то в Компасе:

Несмотря на то, что крепление моторов к несущим трубам довольно простое, пришлось изрядно попотеть, выпиливая из алюминиевой пластины площадки:

Также сложно сверлить в трубах отверстия строго перпендикулярно трубе. Для этого нужно где-то раздобыть специальное устройство, которого я не нашел, поэтому получилось кривовато. С этой точки зрения было бы правильней использовать алюминиевые профили квадратного сечения, хотя и поговаривают, что круглая труба лучше гасит вибрацию.
Центральная пластина моего авторства, трубы крепятся между двух таких пластин и прокладок из микропоры:
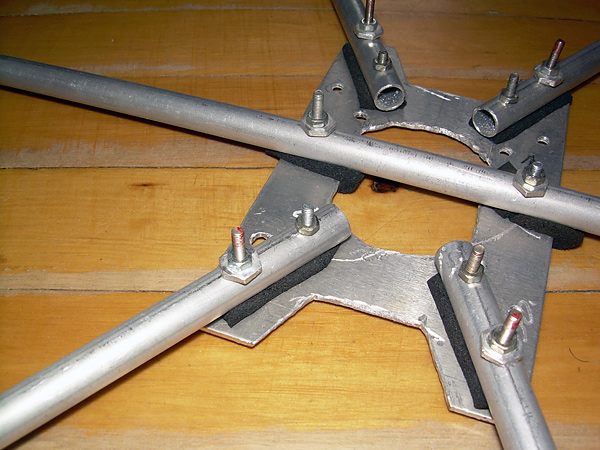
Кусочек рамы в сборе. Вес с моторами 700 г, гашение вибраций замечательное, пока неплохо.

Очень важный урок, который я вынес из недель выпиливания и килограммов стружки: «на коленке» такие вещи не делаются, нужно искать профессиональное оборудование. Ну или у меня просто руки из жопы. Параллельно с этой мыслью ко мне пришла информация, что уже давно существуют конторы, которые лазером режут из металла все, что нарисуешь, причем относительно недорого (~4,3$ за метр реза в наших широтах). Вдохновившись, я прикинул «выкройку» подвеса камеры, чтобы вырезать заодно с другими деталями:
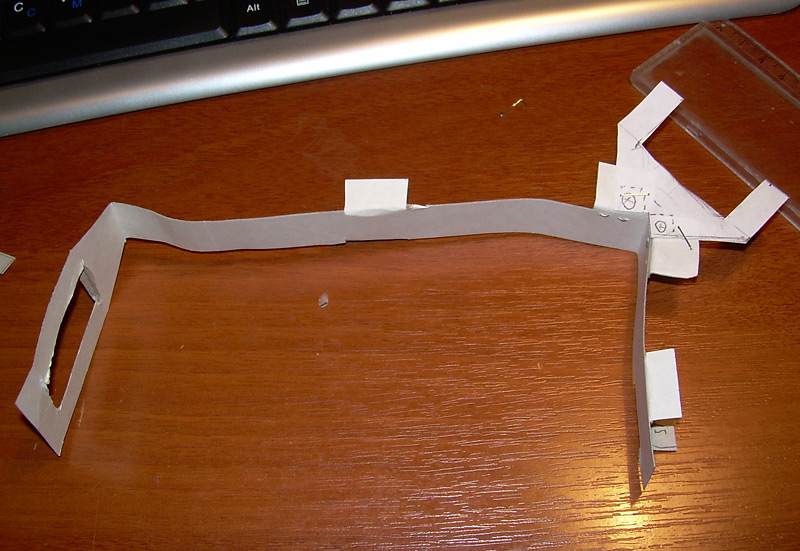
Рисовать в АвтоКаде было просто сказочно удобно и увлекательно, не думаю, что найдется инженерная CAD лучше этой. Однако меня ждало разочарование: в конторе лазер перестал брать дюраль толще 1,5 мм. А по ощущениям от ощупывания этого дюраля, полутора миллиметров явно не хватало. Пришлось снова самому, и снова ручками:

При проектировании своего варианта рамы, нужно сразу предусмотреть места крепления всех компонентов, иначе потом это вылезет боком, придется лепить детали куда попало.
- Крепление несущих труб. Можно одну трубу оставить целой (как на моих фото выше), остальные крепить к пластинам в двух местах болтами, на расстоянии 2 см один от другого
- Крепление главной платы. Как оказалось, ее нельзя ставить как попало, а можно только несколькими способами
- Крепление подвеса камеры. Замечательную виброзащиту подвешивание пластины крепления камеры на отрезках толстого садового шланга.
- Крепление батареи. Мне повезло, батарею удалось прикрепить на подвесе камеры. В комментариях к предыдущим статьям предлагали делать в качестве подвеса steadycam, у которого батарея вместо груза.
- Крепление модема и приемника. Я про них забыл, поэтому пришлось приматывать скотчем прямо к несущим трубам. Не очень эстетично, но вполне надежно, так как эти платы почти ничего не весят.
- Крепление «ног». Про него тоже нужно было помнить, потому что ноги крепить опять-таки к несущим трубам — плохая затея.
Еще по поводу подвеса камеры. Мне не удалось сделать нормальный подвес, получилась монструозная конструкция с немаленьким люфтом. У сервомашинок не хватает силы двигать этот подвес, поэтому даже ненагруженный, он наклоняется рывками. Надо делать с редуктором. И вообще, на мой взгляд, это самая сложная деталь аппарата, ее нужно тщательно спроектировать и изготовить на профессиональном оборудовании.
Еще про рамы можно почитать на сайте Андрея и на форуме там же. Надо заметить, на этом форуме много замечательных идей, их только нужно поискать.
Контроллеры моторов
Вся информация довольно детально описана тут, от себя лишь добавлю, что довольно удобно было купить провода двух цветов, и припаивать по очереди комбинации ч-к-ч — к-ч-к, а затем припаивать к белому и черному проводам мотора один цвет, а к красному — другой. В таком случае, моторы крутятся в противоположных направлениях, через один. Однако не спешите нагревать термоусадочную трубку, пока не проверите, в правильную ли сторону крутятся моторы. Для того, чтобы мотор крутился в другом направлении, достаточно поменять местами любые два провода.
Для начала припаяем шесть контроллеров к распределительной плате (впрочем, это необязательно, можно контроллеры располагать ближе к моторам, но тогда необходимо предусмотреть крепления для них), к соответствующим контактным площадкам провода 12AWG (с разъемом для батареи, соблюдая полярность), а к выходам контроллеров провода 16AWG. Адресные площадки оставляем пока нетронутыми.


Главная плата
К главной плате нужно припаять разъемы для сервомашинок (3,4,8) и связи с компьютером(1), провода питания (уже от распределительной платы, 14 и 16), шину i2c (9), ведущую к распределительной плате и приемник (13, или 11). Полная информация тут и тут. И еще, про приемник. Вместе с главной платой я сразу купил радиомодемы, это очень удобно. Их нужно спаять и настроить в точности по этому или этому руководству.Сборка и настройка
Мультикоптер, на самом деле, уже почти готов. Осталось собрать воедино раму, распределительную плату, главную плату, прикрепить радиомодем, батарею и приемник. Настройка параметров замечательно описана на сайте Андрея тут и тут, так что я не вижу нужды переписывать это руководство еще раз.



Ноги пришлось делать уж совсем из чего попало, но это не критично. В итоге, вышла не особо внушающая доверие конструкция, однако она неплохо себя показала на испытаниях.
Испытания
Спустя месяцы (не)плодотворной работы и перепаивания неправильно припаянных проводов, настал час «Ч». Относительно безветренное морозное утро — прекрасный день, чтобы угробить почти две тысячи долларов.



Управлять летающим аппаратом с непривычки очень сложно. Особенно, когда он кривовато собран, а в автопилоте не настроены соответствующие коэффициенты. Испытания нужно было проводить с привязанным мультикоптером, ну или хотя бы включить контроль высоты, что я сделать забыл. В итоге, аппарат взмыл в небо, а оттуда его понесло на зазевавшегося на испытание прохожего. К этому времени я уже совершенно не понимал, в каком направлении смотрит бортовая плата, и мягко посадить аппарат не удалось. Впрочем, мне снова повезло, и повреждения оказались небольшими: сломана одна несущая труба, ноги мультикоптера, и отбиты почти все пропеллеры.


Теперь предстоит немного переделать раму, предусмотрев защитный каркас, ноги и прочее, а после этого — еще пару испытаний, на этот раз осторожнее. Кроме того, вопрос с подвесом камеры остается открытым.
Прошу прощения за несколько сумбурный и скомканный стиль изложения, под конец оказалось, что большинство информации довольно детально описано на других сайтах, а мои собственные «достижения» относятся скорее к исправлению собственных же ляпов, и внимания не заслуживают.
Спасибо, что летали нашими авиалиниями.

{kind=link}
{kind=link}