Привет Хабр!
Представляем Navio — плату расширения для Raspberry Pi предназначенную для управления самолетами, коптерами, лодками и другими роботами. Мы уже прошли путь от идеи, изготовления прототипов и тестирования до успешной кампании по сбору предзаказов на Indiegogo.
Ранее мы работали над коммерческим автопилотом на микроконтроллере и каждый раз добавляя новый функционал думали “А ведь в Линуксе можно было бы просто подключить libxyz для этого”. Однако на тот момент не существовало удобной аппаратной платформы, на которой можно было бы заниматься разработкой, так мы и пришли к решению сделать Navio.
Малина была выбрана как самая распространенная и недорогая Линукс-плата у которой есть огромное сообщество пользователей, сделавших на ней множество проектов с подробным описанием. В число этих проектов входят коптеры, самолеты, лодки — их создателям приходилось использовать различные шилды и брейкауты, что в итоге приводило к работе с огромной кучей проводов. Navio позволяет избавиться от этого и представляет из себя компактное и удобное решение.
В отличие от текущих автопилотных платформ на микроконтроллерах, на Raspberry Pi + Navio можно программировать почти на любом языке, легко подключать дополнительную нагрузку — можно подключить камеру и WiFi-свисток и получить FPV из коробки. Также у Raspberry Pi большая производительность, что может пригодится при обработке GPS-данных или при распознавании образов.

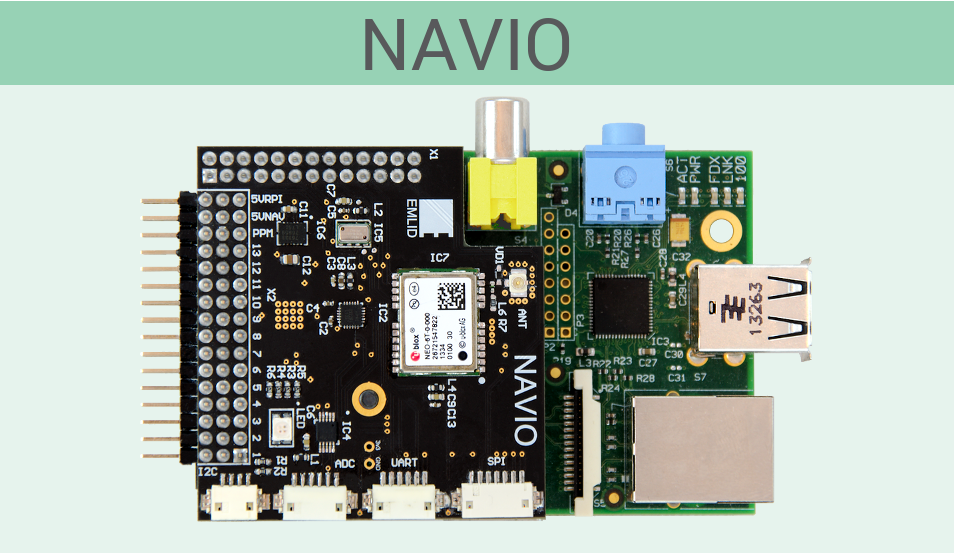
На борту платы
- U-blox NEO — GPS\GNSS приемник. Две версии на выбор: мультисистемный NEO-7M или NEO-6T с возможностью получения фазовых измерений для обработки.
- MPU9250 — акселерометр, гироскоп, магнитометр для определения ориентации.
- MS5611 — датчик давления для расчета высоты, также позволяет измерять температуру.
- ADS1115 — 4-х канальный АЦП для измерения заряда батареи и подключения аналоговых датчиков.
- PCA9685 — 16-канальный ШИМ-генератор для управления сервомоторами, 13 каналов выведены на стандартные серворазъемы.
- MB85RC — FRAM, энергонезависимая память, до 1 триллиона операций записи\стирания.
- RGB LED — для простого визуального отображения статусов.
- PPM вход — для подключения приемника, позволяющего перевести управление в ручной режим с пульта.
- DF13 разъемы — Pixhawk-совместимые разъемы UART, I2C, SPI. Позволяют подключить радиомодем, датчик воздушной скорости и многое другое.
- Также, для поддержавших нашу кампанию на Indiegogo в комплекте с платой будут отправлены GPS\GLONASS антенна и набор проводов с DF13 коннекторами.

Код
Для того чтобы можно было быстро приступить к работе с Navio мы подготовили драйвера для датчиков и сейчас работаем над туториалами, которые покажут как их использовать.
Краудфандинг
Мы решили провести краудфандинговую кампанию для того чтобы оценить спрос на наше устройство и собрать необходимую сумму для производства первой крупной партии плат на заводе. Более подробную информацию можно найти на нашей странице на Indiegogo:
Navio на Indiegogo
К сожалению, все только на английском, но я буду рад ответить на любые вопросы в комментариях или по почте info@emlid.com
