Частой задачей при обучении теории автоматического управления является расчет корректирующего устройства методом желаемой ЛАЧХ. Эта задача дается для ознакомления с большим миром управления в частотной области. Зачем вообще частотный метод, когда есть модальный? Дело в том, что в 1978 году Джоном Дойлом в статье Guaranteed Stability Margins for LQG Regulators было показано, что для LQG регуляторов не существует гарантированного запаса устойчивости, и поэтому в зависимости от объекта управления, шума и помех в каналах управления и измерения, LQG регулятор может быть сколь угодно чувствительным к неопределенности в модели и временным задержкам, а значит он может быть сколь угодно не надежным (робастным). В данной статье покажем несколько способов расчета компенсатора частотными методами, помимо метода желаемой ЛАЧХ, в пакете Matlab с использованием Control System Toolbox.
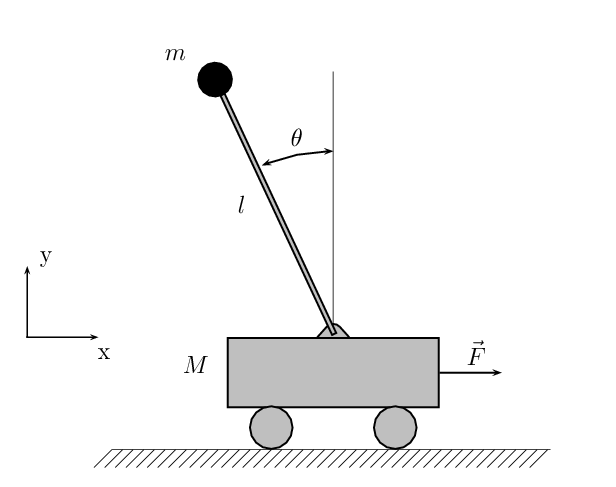
Простой и популярной реализацией закона управления обратным маятником является PID регулятор. Современные средства настройки коэффициентов PID регулятора позволяют решать подобные задачи нажатием пары кнопок даже без знания математики, физики и вообще без каких-либо технических знаний. Рассмотрим пример настройки PID регуляторов в Simulink для классического обратного маятника.
Объект управления (Plant)
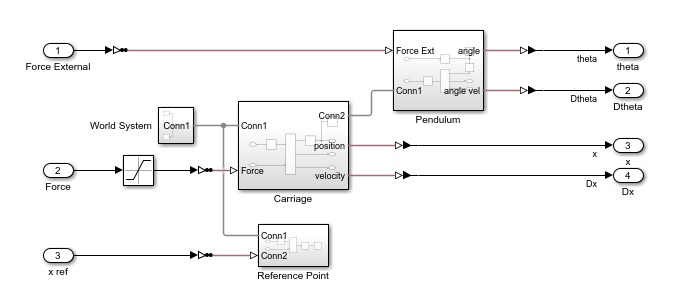
Модель перевернутого маятника соберем в библиотеке Multibody. Для этого нам не понадобится знание физики и математики. Библиотека Multibody предоставляет нам готовые блоки степеней свободы, твердых тел, преобразований координат, которые нужно только верно соединить. Собираем подсистемы отдельно для маятника и отдельно для тележки, и собираем все вместе. Результат на рисунке, модель в прикрепленных файлах.
Классическим примером демонстрации возможностей теории управления является модель обратного маятника на тележке. В данной статье продемонстрируем решение классических проблем классическими методами, но в максимально тепличных условиях, когда всю рутинную работу за нас будут выполнять алгоритмы пакета MATLAB.
Пример решения системы дифференциальных уравнений (ДУ) в MATLAB адаптивным и не адаптивным методами.
В MATLAB встроено множество численных решателей с адаптивным шагом для решения жестких, нежестких и полностью неявных систем. С помощью Symbolic Math Toolbox можно сначала выводить системы ДУ, а затем тут же решать их численными методами.
Описание модели
Для примера решим систему ДУ, которая описывает систему из двух масс m1 и m2, которые жестко соединены невесомым стержнем длинной L.
Частым заданием в различных курсах по теории автоматического управления является нахождение матрицы K для модального управления системой вида dx/dt = Ax+Bu y = Cx.
Такой тип задач легко решается в среде MATLAB.
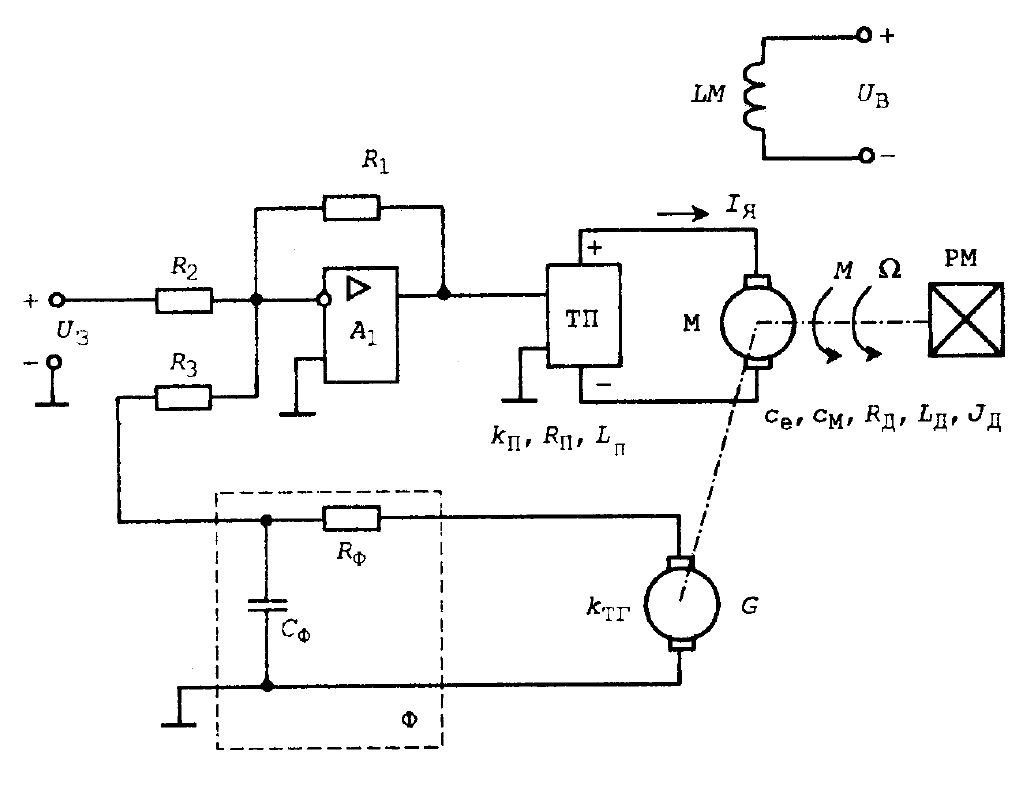
Сперва наперво требуется задать нашу систему. Для примера возьмем типовую модель электродвигателя: