Не подумайте, что я какой-нибудь преступный элемент, параноик или неверный муж, но как-то раз я решил купить глушилку GPS. Во-первых, был интересен сам процесс. Ведь дело вроде нелегальное, продавец как будто рискует. Хотелось в этом поучаствовать, а не просто послушать или почитать. Во-вторых, чисто технически и чисто экономически было интересно — как сделано и сколько стоит.
К чему это привело читайте дальше.
Эпиграф
У нас потерялся робот. Работы прекратились и должны стоять, пока мы его
не обнаружим.
А. Азимов, «Как потерялся робот»
Ко дню рождения одного товарища
И. Царик, «Пользуясь случаем»
не обнаружим.
А. Азимов, «Как потерялся робот»
Ко дню рождения одного товарища
И. Царик, «Пользуясь случаем»
Зачем нужны GPS-глушилки и GPS-спуферы особо рассказывать не нужно. Сегодня все знают, что даже «новая аристократия» их использует для пущей безопасности. Особенно это знают жители Москвы. Что уж тогда говорить о простых людях. Ну когда у нас кому было какое дело до мелких неудобств соседа? «Если „Им“ наплевать, то мне тем более. Если мне нужно — врубил и поехал».
Но мир серьезно увяз в технике. Сегодня навигатор является продолжением мозга немалого числа водителей, особенно «светловолосых» их представительниц. Можно улыбаться и сетовать, но этот процесс развивается. И что будет, если им всем отрубить навигацию?
А теперь представьте себе робо-водителя будущего…
Не то чтобы я лично призывал не использовать глушилки. Напротив, мне лично без них было бы менее интересно заниматься техникой, описанной ниже. Кому война, а кому…
Резюме — врага надо знать в лицо. Я знаю, что глушилка — вещь мелкая и что есть работа профессора Эбинумы по более «тонкой настройке» спутниковой навигации, но простейший метод противника тоже мне интересен.
Самый дешевый способ вырубить навигацию стоил мне 2500 рублей.

Вещь простая, но в упаковке, вид которой отдает болезнями мозга. Я, по крайней мере, сразу заразился. Вот, думаю, хороший саркофаг для любимой мышки (
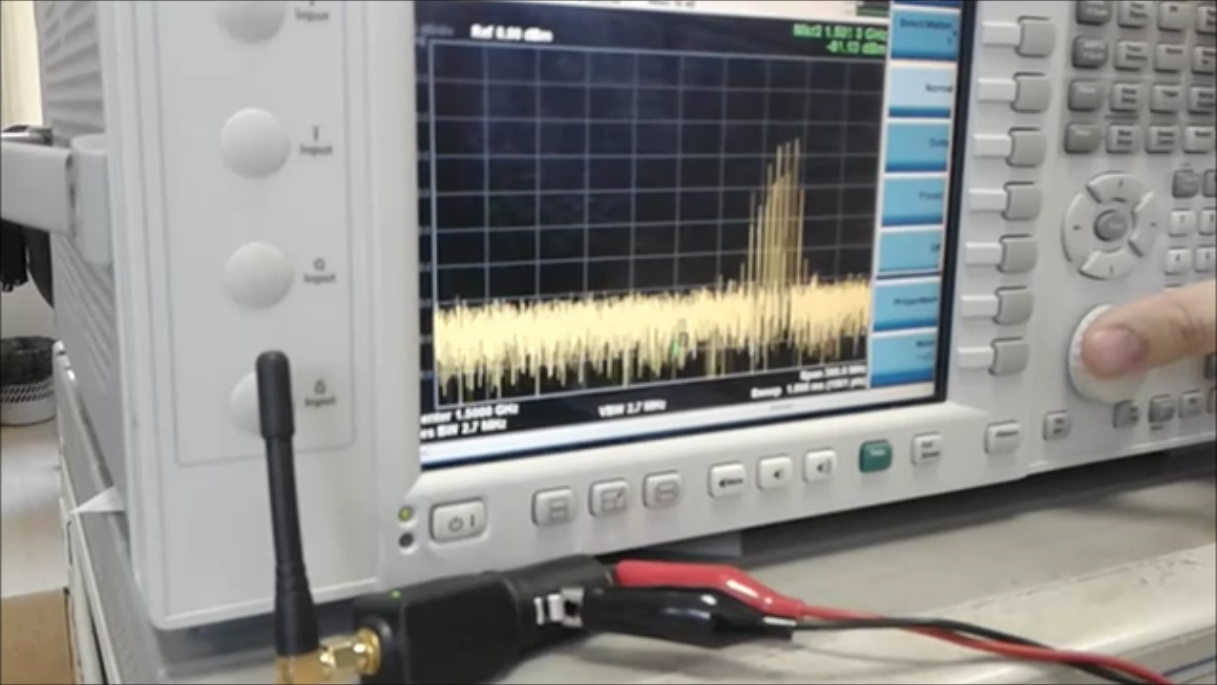
А какой богатый у него спектр (видео)!
Далее эта зараза во мне прогрессировала в деструктивные действия и я разобрал его:
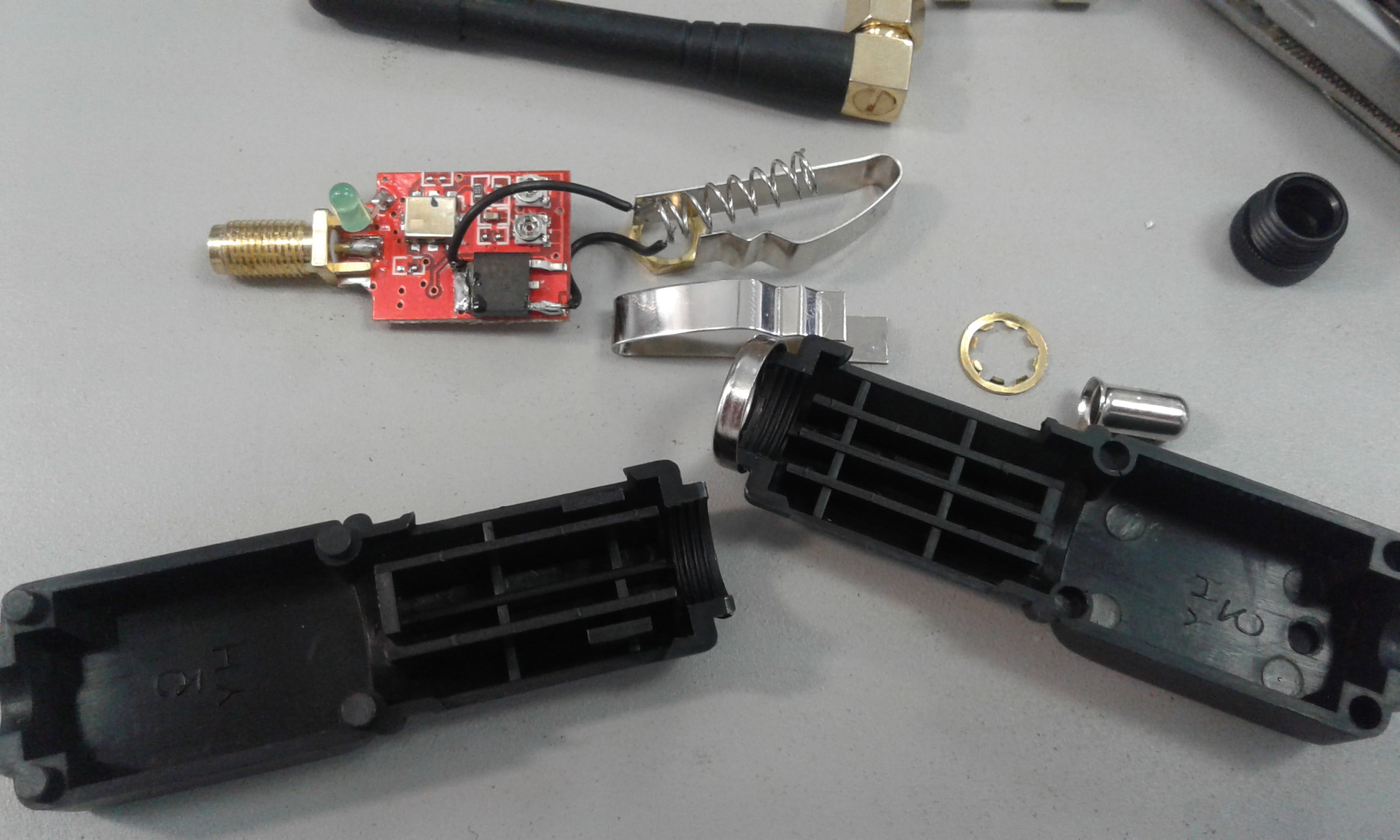
Все очень просто и со вкусом, почти по-деревенски. И теперь вы все понимаете, почему демон рыжый. (Хотя и «История рыжего демона» мне тоже нравится.)
Но каково оно в действии!
Разящий огонь инквизиции! Теперь каждый пацан, сэкономив на пиве 30 раз, может «сжечь» всю навигацию на районе. Здесь хочу заметить, что запускал я эту штуку за городом. Ни один автолюбитель не пострадал.
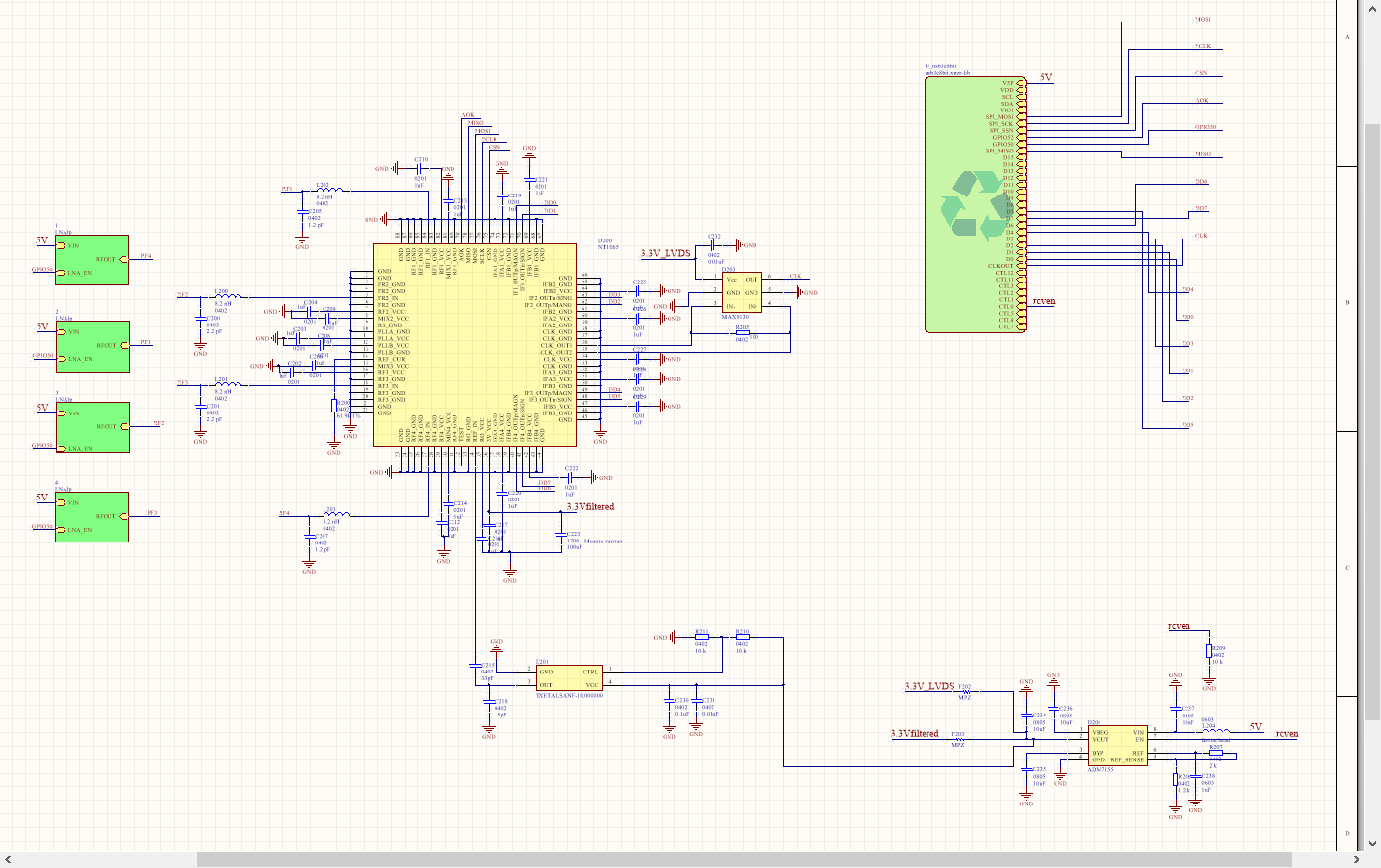
И повинуясь судьбе, я воспылал желанием запеленговать сие исчадье. Пеленгатор я стал делать с использованием моей любимой дополненной реальности и чудесной микросхемы NT1065.
NT1065 содержит четыре радио-тракта, которые можно настроить на использование одного гетеродина. Это видно по структурной схеме:

Тогда все четыре канала будут синфазны с точностью до неидентичностей радио-трактов. На рисунке ниже показан спектр разностей фаз.

Видно, что разности фаз стабильны, таким образом, возможно создание на базе NT1065 четырехканального фазового пеленгатора.
Берем плату из предыдущей статьи, добавляем к ней четыре антенны с малошумящими усилителями (МШУ). Можно было и без МШУ, но хотелось немного поднять сигнал в диапазонах, где антенна согласована плохо.
ВЧ-фильтры, рекомендуемые к установке на входе NT1065, для простоты и для гибкости пеленгатора, опускаем. Антенны настроены только на верхний навигационный диапазон (L1), но, закрыв глаза на чувствительность, можно будет попробовать использовать пеленгатор и на нижних диапазонах (L2, L3, L5 и т.д.). Позже посмотрим, что получится.
Вот такая получилась железяка:
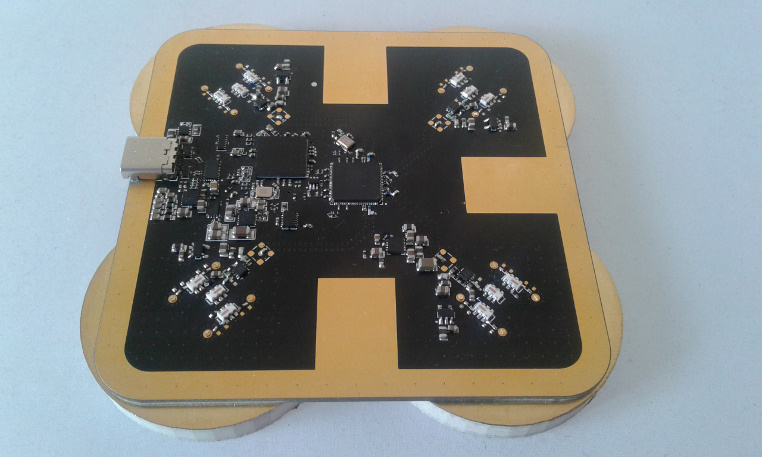
Пришлось повозиться. чтобы уложить все на одну сторону, потому что с другой стороны только антенны. Без игнорирования рекомендаций по разводке микросхем не обошлось. Вылизывать буду потом.
А сейчас — софт (видео).

Исходники — здесь.
Вкратце софт работает так: берем сколько-то непрерывных отсчетов, делаем их БПФ (с окном, естественно), усредняем частотные отсчеты БПФ (бины) в выбранной пользователем полосе и вычисляем пеленг. Все это операции стандартные, которые скучно описывать образованной публике, кроме вычисления пеленга.
Здесь все сделано по-простому: алгоритм можно назвать «формирование диаграммы направленности», по-английски наверное будет beamformer — находим направление основного лепестка диаграммы направленности, наиболее соответствующее принятому антенной решеткой сигналу. Формула будет такая:
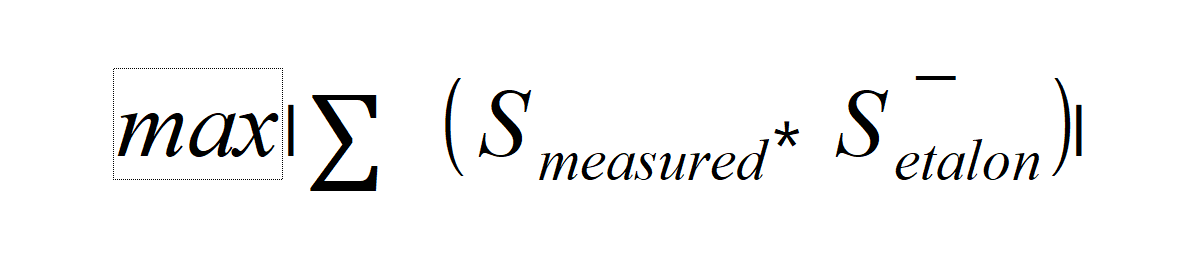
Конкретный код смотрите в GitHub'е, кому интересно.
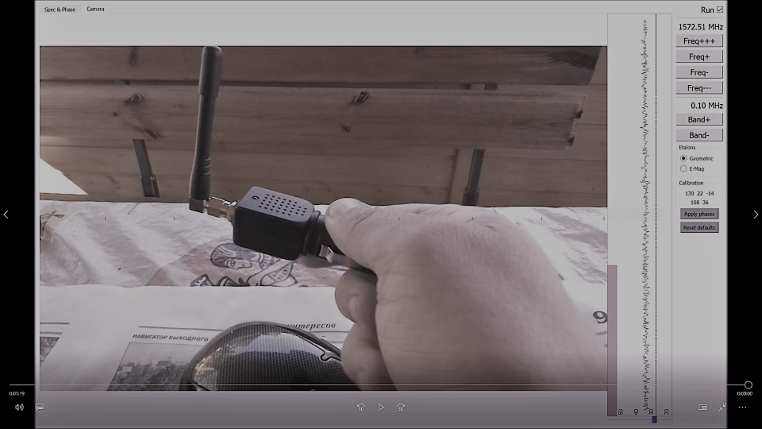
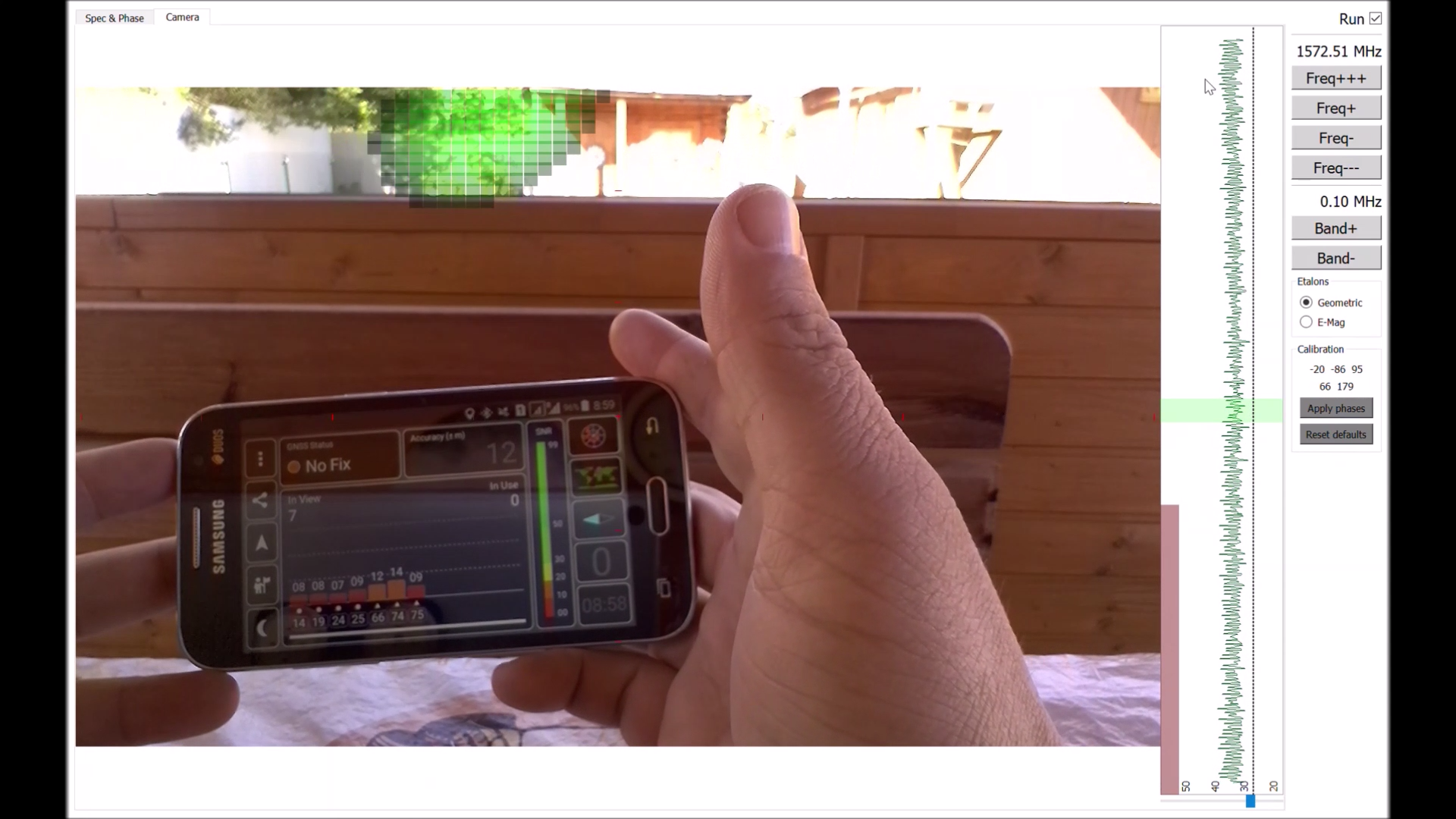
Далее от максимума диаграммы направленности откладываем 1 процент и делаем срез. Получаем угловую область, некоторое «облако» углов, на которых вероятнее всего находится источник сигнала. Эту область углов затеняем на реальном видео с камеры планшета. В целом железяка выглядит так (как обычно смонтирована на задней стенке планшета):

И работает так: (видео).
Еще можно выбрать положение и ширину обрабатываемой полосы частот и установить порог по уровню сигнала. Также есть индикатор суммарной мощности в полосе, что позволяет сначала грубо найти сектор.
Если сравнивать такой фазовый пеленгатор с моим предыдущим амплитудным для WiFi, то этот принципиально более чувствителен. Ну и он уже не ручной, а автоматический. То есть в принципе им уже вращать не обязательно. Но все еще желательно это делать, так как точность лучше всего в фокусе. И с обратной стороны он не работает тоже. Там меньше всяких внутренних антенных искажений.
Но, как показывает видео, интерференцию никто не отменял. Если нет прямого луча, искажения могут быть значительными. И поляризационная зависимость тоже некоторая есть.
Вот на это я и хочу направить дальше свои усилия.
P.S.: На нижнем диапазоне, в навигационной формулировке L2, L3, L5 и т.д., пока работает не очень. Надо курить калибровку.
