Чтобы сделать захват роботов более надёжным, исследователи разрабатывают максимально сложные для манипулирования объекты

Вдохновившись концепцией состязательных изображений, исследователи из Калифорнийского университета в Беркли изучают физические состязательные объекты, тщательно разработанные так, чтобы их было сложно захватывать стандартными роботизированными захватами
В последнее время появилось огромное количество исследований по теме «состязательных изображений», представляющих собой изображения объектов, изменённые таким образом, чтобы алгоритмам компьютерного зрения их было особенно сложно распознавать. Идея в том, чтобы использовать эти изображения для разработки более надёжных алгоритмов компьютерного зрения, поскольку их «состязательная» природа представляет собой специально реализованный «наихудший» вариант – и если уж ваш алгоритм сможет справиться с состязательными изображениями, то он, вероятно, справится с большинством других заданий.
Исследователи из лаборатории автоматизации и инженерного дела (AUTOLAB) при Калифорнийском университете в Беркли под руководством профессора Кена Голдберга расширили эту концепцию на роботизированные захваты. Они специально разработали физические состязательные объекты так, чтобы те было сложно поднимать обычными роботизированными захватами. Нужно лишь немного подправить обычные трёхмерные фигуры, и стандартный двухпальцевый захват столкнётся со всевозможными трудностями, пытаясь как следует ухватить объект.
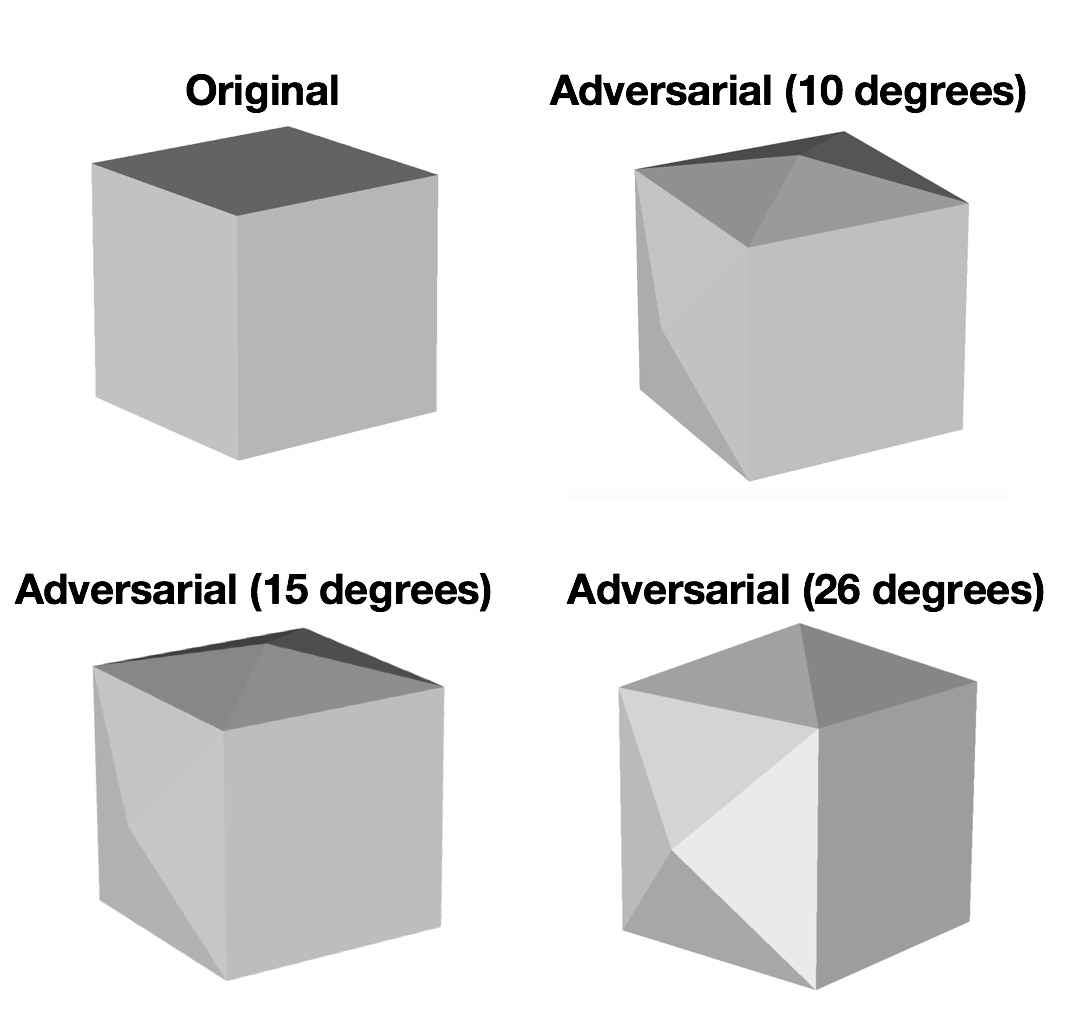
Начиная с куба, состязательный объект эволюционирует, превращаясь во всё более сложный для захвата двухпальцевым зажимом – когда он пытается сжать угловатую поверхность, объект поворачивается и выскальзывает.
Главная особенность этих состязательных объектов в том, что они выглядят так, будто их легко схватить, но, по крайней мере, двухпальцевым зажимом сделать это оказывается сложно. Разница между тем, как объекты выглядят, и их реальной геометрией, незначительна: в одном примере это куб с невысокими пирамидками с трёх из шести сторон – у самой маленькой из них угол наклона рёбер всего 10 градусов. А напротив каждой пирамиды находится обычная плоская грань, поэтому у куба не оказывается противостоящих плоских граней. Из-за этого двухпальцевые захваты, работающие на зажим предметов, сталкиваются с проблемами, поскольку если пытаться зажать расположенную под углом поверхность, сила сжатия заставит предмет повернуться, и он часто будет выпадать из зажима.

Параллельный захват с точечными контактами успешно захватывает обычный куб (слева) и не справляется с состязательным кубом, разработанным исследователями (справа)
Планировщики захватов часто ищут гладкие противостоящие поверхности, которые можно зажать, и поскольку разница между состязательным и обычным кубом достаточно мала, чтобы её мог пропустить 3D-датчик, большинство роботизированных систем подумают: «О, гляньте-ка, это же куб, это очень легко!» И потом они наверняка провалят задачу, когда куб выкрутится и выскользнет из их захвата.
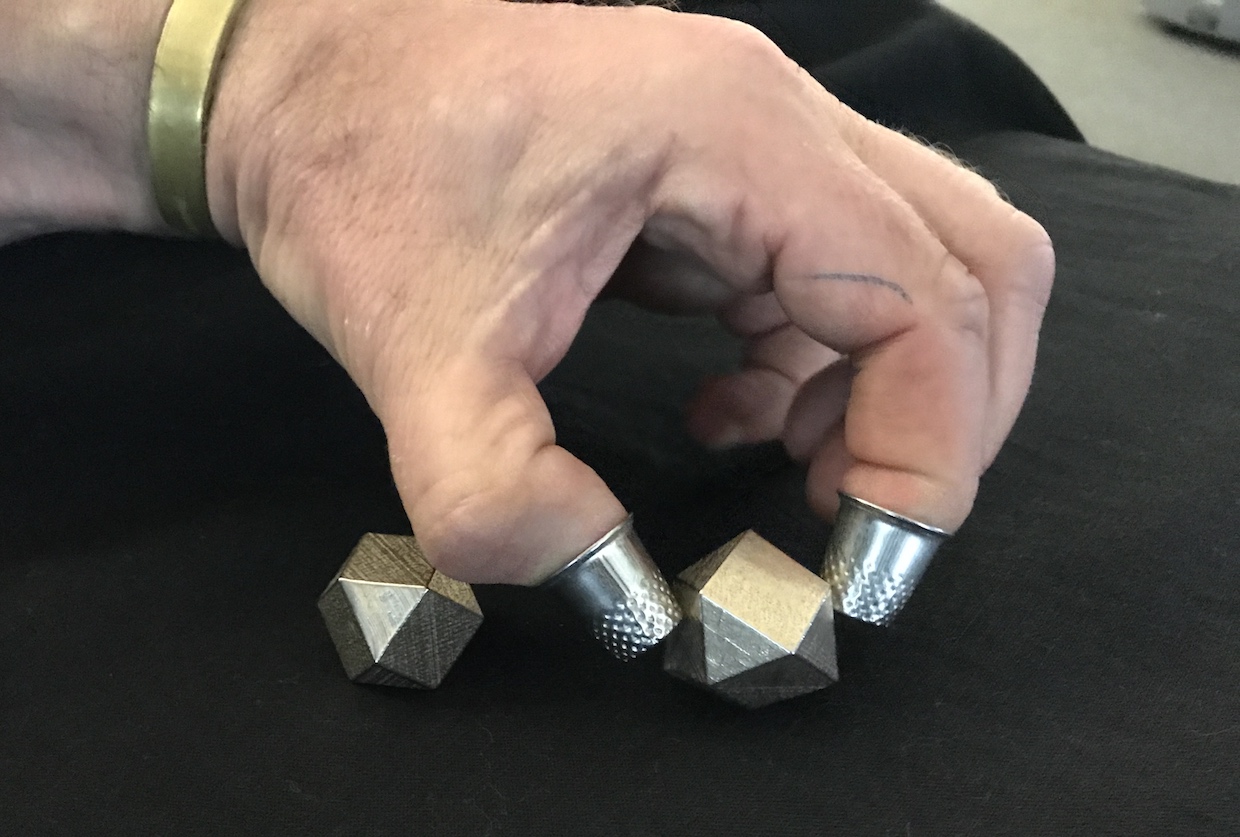
Состязательные формы работают и на людях – надев напёрстки, эмулирующие холодную бесчувственную сталь робота, и используя два пальца для зажима объекта, исследователи подтвердили, что эти объекты поднимать сложно
С увеличением сложности формы становится всё труднее разработать его состязательную версию. Взяв кубооктаэдр (многогранник с восемью треугольными и шестью квадратными гранями), исследователи случайным образом изменяли вершины фигуры (в симуляции), пока не получили форму, у которой нет прямо противоположных граней. А для более сложных форм, типа пересекающихся цилиндров, состязательные примеры были получены с помощью алгоритма глубокого обучения.

Для более сложных форм, типа пересекающихся цилиндров, состязательные примеры были получены с помощью алгоритмов глубокого обучения
В предварительных тестах в реальном мире параллельный точечный захват пытался поднимать некоторые из этих состязательных объектов. В каждом случае расчетная вероятность захвата объекта составила 100% (на основе политики Dex-Net, испытанной в симуляции), однако на деле оказалось, что успешные захваты состязательных кубов и кубооктаэдров удавались лишь в 13% случаев.
Исследователи говорят, что планируют проверить эти объекты с различными типами захватов, а также с вакуумными захватами, чтобы понять, смогут ли они создать наиболее состязательные объекты из всех. И помните, что цель всего этого – не просто обмануть несчастные алгоритмы захвата, а разработать инструменты, которые помогут сделать работу роботизированного захвата достаточно (надеемся) надёжной для реального мира.
