В статье выделены принципиальные недостатки такого летательного аппарата, как вертолет, предложено их решение. Рассмотрено возможное применение данной концепции в робототехнических системах и комплексах. Описанный подход, не претендует на однозначность и точность, а статья имеет цель поделиться технической идеей с читателями GT.
Летательный аппарат(ЛА) – это машина или устройство для полетов в атмосфере или космическом пространстве. На данный момент классификация ЛА имеет огромное множество видов и типов летательных устройств, среди этого множества можно выделить один из активно используемых видов ЛА – вертолет.
Выделим принципиальные недостатки вертолета как класса:
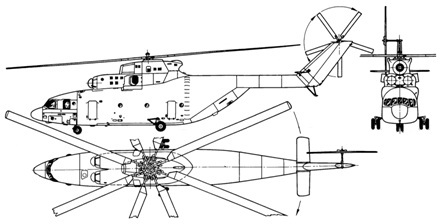
Рисунок 1 — Вертолет Ми-26 в трех проекциях
Ширина грузовой кабины вертолета составляет 320 см, для сравнения, ширина бронетранспортера БТР-70 – 280 см, соответственно между каждым бортом транспортера и стенкой грузовой кабины вертолета остается пространство в 20 см, что является отрицательным фактором при погрузке техники таких габаритов (рис. 2, справа). На рисунке 2 (слева) проиллюстрирована сложность процесса погрузки с использованием автопогрузчика.
Наличие данного фактора вносит неудобства при применении вертолетов в гражданских грузоперевозках и является критичным при использовании таких летательных средств в ЧС и военных действиях.
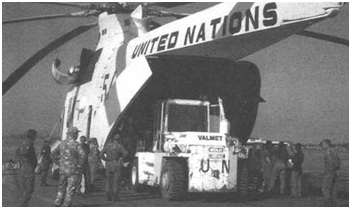
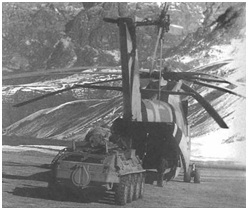
Рисунок 2 – Процесс погрузки автопогрузчиком (слева), погрузка БТР-70 (справа)
Квадрокоптер – это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях. Такая схема размещения несущих винтов позволяет реализовать ЛА с фюзеляжем более широким чем в вертолетах (рис. 3), а наличие четырех несущих винтов обеспечит четыре ометаемые зоны, что позволит выполнять приземление и взлет при боковом крене.
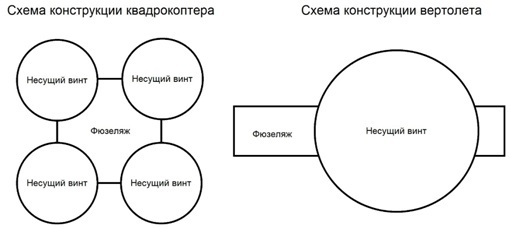
Рисунок 3 – Блок-схема конструкций квадрокоптера и вертолета
При использовании данной схемы такие узлы как топливная система, система управления, радиолокационная система, электрика размещаются в верхней части фюзеляжа в специальной бронекапсуле (рис. 4). Такая компоновка узлов позволяет разместить люки грузовых отсеков и грузовые трапы в любой из 5 сторон фюзеляжа (рис. 5): с четырех боковых сторон и снизу (люк вертикальной погрузки).
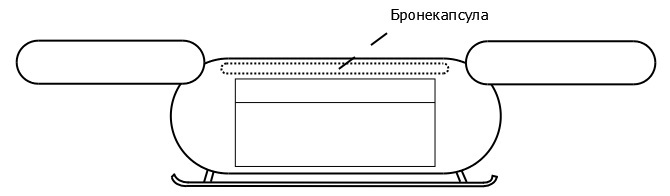
Рисунок 4 – Расположение бронекапсулы
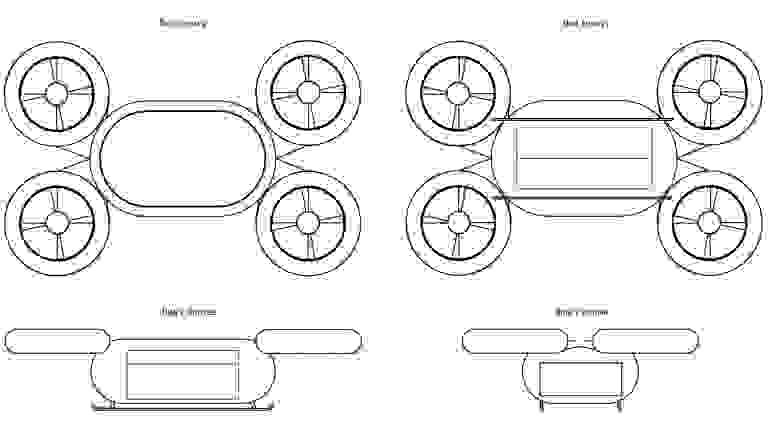
Рисунок 5 – Размещение грузовых люков
Рассмотренный подход имеет следующие недостатки:
Возможные решения:
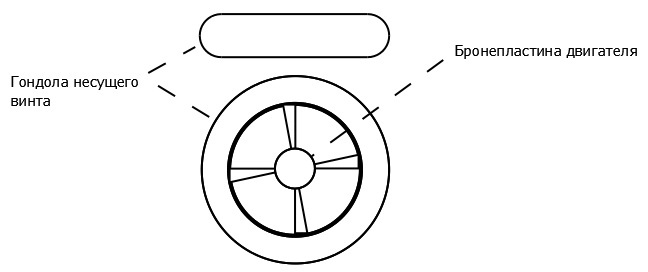
Рисунок 7 – Размещение несущих винтов
ПРИМЕНЕНИЕ КОНЦЕПЦИИ В РОБОТОТЕХНИЧЕСКИХ
Беспилотный летательный аппарат (БПЛА) – летательный аппарат без экипажа на борту, реализованный с использованием средств робототехники. Реализация грузового квадрокоптера, как БПЛА, целесообразна:
Централизованное управление с человеком-оператором (связь “один к одному”).Структура системы управления:
Централизованное управление с диспетчерским пунктом (связь “один ко многим”). Структура системы управления:
Децентрализованное управление (связь “многие ко многим”).Структура системы управления:
ПОСТАНОВКА ЗАДАЧИ
Летательный аппарат(ЛА) – это машина или устройство для полетов в атмосфере или космическом пространстве. На данный момент классификация ЛА имеет огромное множество видов и типов летательных устройств, среди этого множества можно выделить один из активно используемых видов ЛА – вертолет.
Выделим принципиальные недостатки вертолета как класса:
- сложность погрузки грузов и техники больших габаритов из-за узкой грузовой кабины,
- посадка возможна только при отсутствии бокового крена из-за узкого фюзеляжа и одной зоны, ометаемой несущим винтом.

Рисунок 1 — Вертолет Ми-26 в трех проекциях
Ширина грузовой кабины вертолета составляет 320 см, для сравнения, ширина бронетранспортера БТР-70 – 280 см, соответственно между каждым бортом транспортера и стенкой грузовой кабины вертолета остается пространство в 20 см, что является отрицательным фактором при погрузке техники таких габаритов (рис. 2, справа). На рисунке 2 (слева) проиллюстрирована сложность процесса погрузки с использованием автопогрузчика.
Наличие данного фактора вносит неудобства при применении вертолетов в гражданских грузоперевозках и является критичным при использовании таких летательных средств в ЧС и военных действиях.


Рисунок 2 – Процесс погрузки автопогрузчиком (слева), погрузка БТР-70 (справа)
РЕШЕНИЕ ЗАДАЧИ
Квадрокоптер – это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях. Такая схема размещения несущих винтов позволяет реализовать ЛА с фюзеляжем более широким чем в вертолетах (рис. 3), а наличие четырех несущих винтов обеспечит четыре ометаемые зоны, что позволит выполнять приземление и взлет при боковом крене.
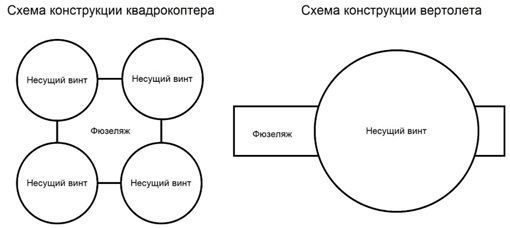
Рисунок 3 – Блок-схема конструкций квадрокоптера и вертолета
При использовании данной схемы такие узлы как топливная система, система управления, радиолокационная система, электрика размещаются в верхней части фюзеляжа в специальной бронекапсуле (рис. 4). Такая компоновка узлов позволяет разместить люки грузовых отсеков и грузовые трапы в любой из 5 сторон фюзеляжа (рис. 5): с четырех боковых сторон и снизу (люк вертикальной погрузки).
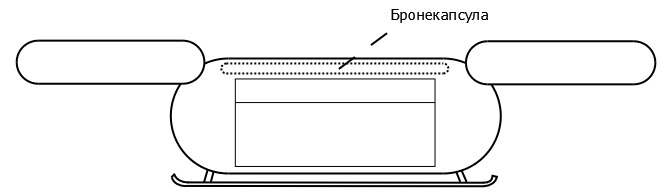
Рисунок 4 – Расположение бронекапсулы

Рисунок 5 – Размещение грузовых люков
НЕДОСТАТКИ РЕШЕНИЯ
Рассмотренный подход имеет следующие недостатки:
- уязвимость двигателей несущих винтов,
- маленький объем топливного бака из-за размещения в верхней части фюзеляжа.
Возможные решения:
- размещение несущих винтов в специальных гондолах и бронепластин, закрывающих двигатели (рис. 7)
- размещение топливных баков с внешней стороны фюзеляжа ЛА.

Рисунок 7 – Размещение несущих винтов
ПРИМЕНЕНИЕ КОНЦЕПЦИИ В РОБОТОТЕХНИЧЕСКИХ
СИСТЕМАХ И КОМПЛЕКСАХ
Беспилотный летательный аппарат (БПЛА) – летательный аппарат без экипажа на борту, реализованный с использованием средств робототехники. Реализация грузового квадрокоптера, как БПЛА, целесообразна:
- в робототехнических комплексах, например, в составе роботизированной транспортно-логистической системы (полностью автоматический процесс хранения и перевозки груза);
- как самостоятельной системы, для использования в условиях повышенной опасности для жизни пилота (ЧС, боевые действия);
- как самостоятельной системы, для решения задач, требующих большого количества ЛА и высокой степени оперативности (боевые действия, грузоперевозки, скорая медицинская помощь).
Централизованное управление с человеком-оператором (связь “один к одному”).Структура системы управления:
- человек-оператор,
- удаленный терминал,
- ЛА с бортовой интеллектуальной системой обработки информации.
Централизованное управление с диспетчерским пунктом (связь “один ко многим”). Структура системы управления:
- человек-оператор,
- удаленный терминал,
- один или группа ЛА с бортовой интеллектуальной системой управления.
Децентрализованное управление (связь “многие ко многим”).Структура системы управления:
- источники запросов (человек, техническая система),
- группа ЛА с бортовой интеллектуальной системой управления.













