При реализации системы управления положением объекта часто применяют двухконтурную структуру, включающую в себя два регулятора: положения нагрузки и скорости исполнительного устройства. В таком случае возникает необходимость одновременной настройки обоих регуляторов. Данная задача может быть решена с использованием инструмента Control System Tuner.
Модель системы
Структурная схема двухконтурной системы и ее модель, созданная на основе этой схемы, показаны ниже.


Параметры электропривода и нагрузки указаны в первой части серии.
Отличие моделей Electric actuator и Load заключается в добавлении новых датчиков: датчик угловой скорости измеряет скорость ротора исполнительного двигателя привода и датчик положения измеряет положение объекта управления.
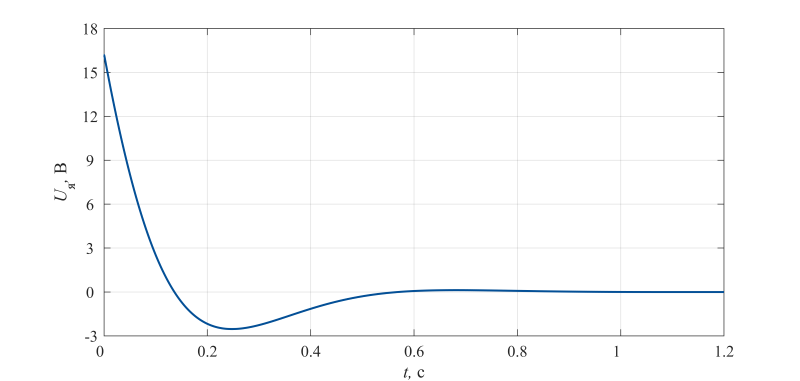
В качестве регуляторов положения и скорости будем использовать П и ПИ регуляторы соответственно, причем последний имеет ограничение по выходному сигналу ±24 В, и в нем реализован метод clamping для борьбы с интегральным насыщением.
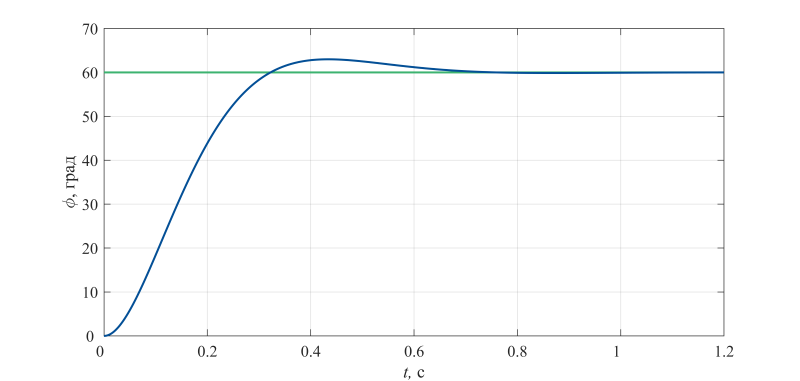
Входным сигналом для системы является требуемый угол поворота нагрузки, который должен изменяться в диапазоне ±60°.
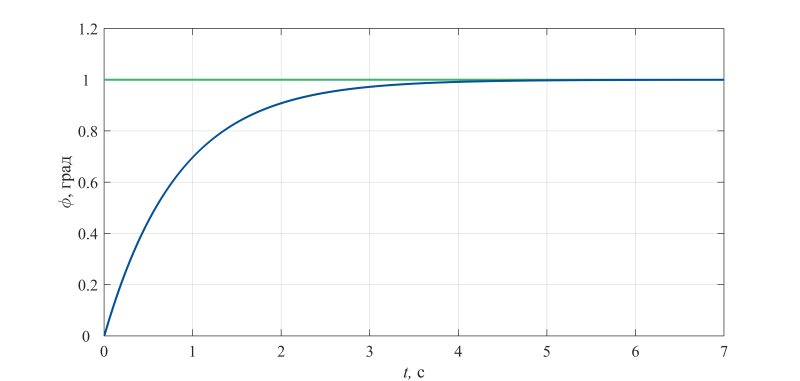
Без регуляторов, т.е. предположив  , переходный процесс, апериодический с временем переходного процесса, равным 2.5 с.
, переходный процесс, апериодический с временем переходного процесса, равным 2.5 с.
Предъявим следующие требования к переходному процессу системы:
- Перерегулирование (Overshoot) не более 5%;
- Время переходного процесса (Settling time) менее чем 1 с.
Настраиваем контроллеры
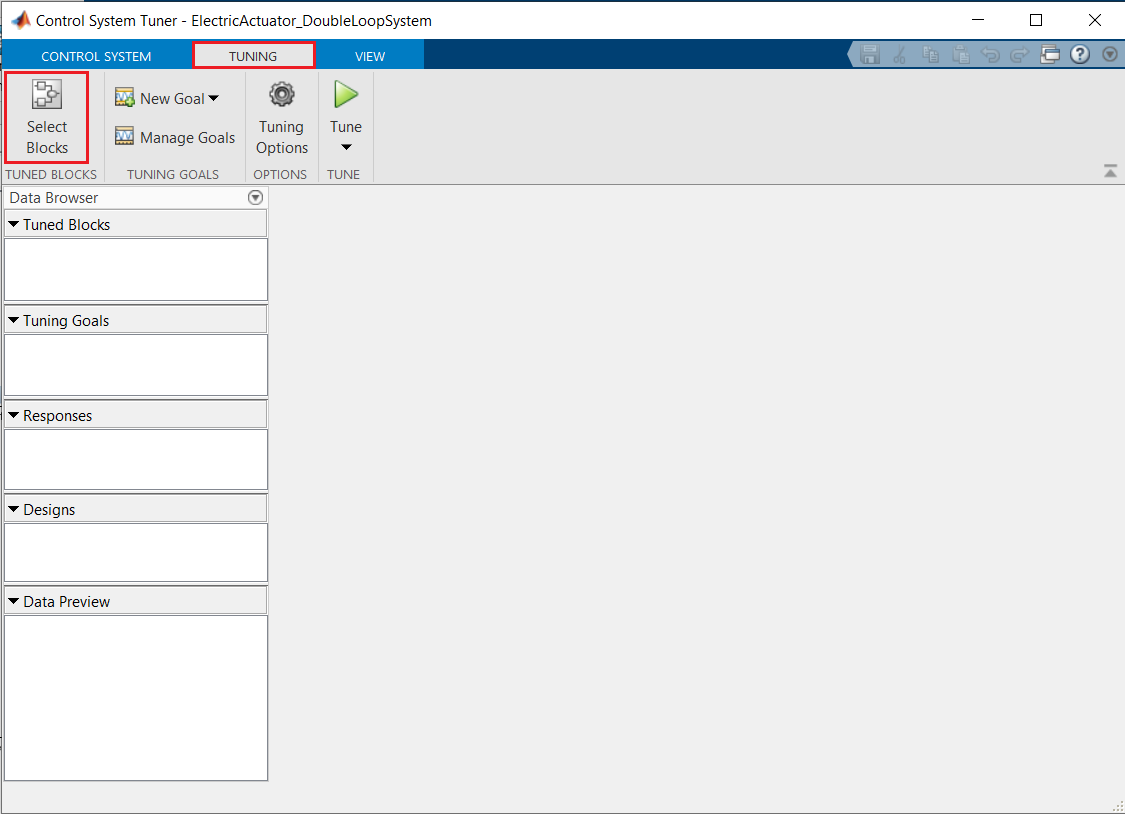
Приложение Control System Tuner располагается во вкладке APPS окна модели Simulink в разделе CONTROL SYSTEMS.
Настройка регуляторов осуществляется в соответствии со следующим алгоритмом:
После открытия окна приложения переходим во вкладку TUNING и нажимаем кнопку Select Block.
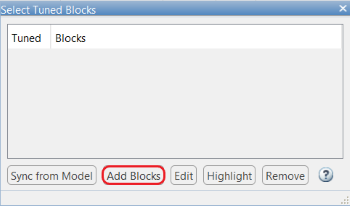
В открывшемся диалоговом окне нажимаем на кнопку Add Blocks для добавления блоков регуляторов.
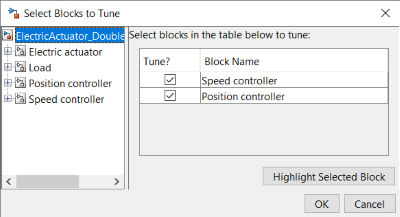
Устанавливаем флажок рядом с требуемыми блоками подтверждаем выбор нажатием кнопки OK. В результате выбранные блоки отобразятся в разделе Tuned Blocks панели Data Browser.
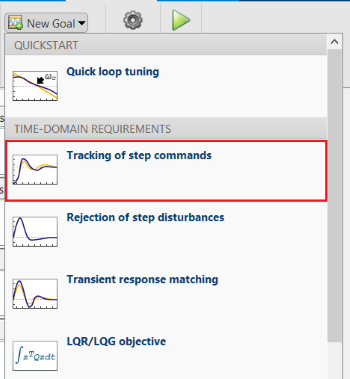
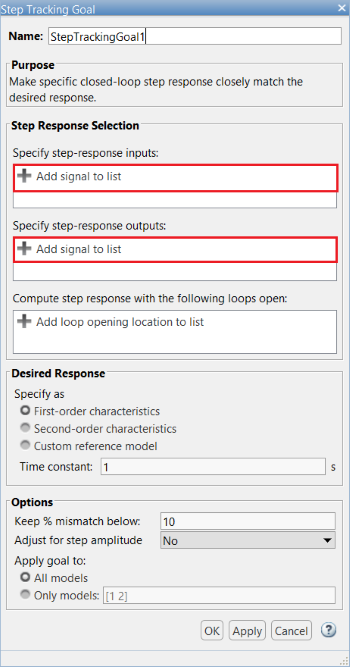
Создаем новую задачу для настройки. Для этого нажимаем кнопку New Goal и в выпадающем меню выбираем опцию Tracking of step commands в разделе TIME-DOMAIN REQUIREMENTS. В результате откроется диалоговое окно Step Tracking Goal.
Необходимо указать входной и выходной сигналы системы. Для этого в полях
Specify step-response inputs и Specify step-response inputs нажимаем на кнопку
Add signal to list → Select signal from model.
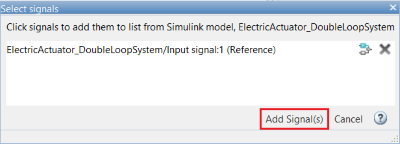
Переходим в окно модели и выбираем соответствующие сигналы, в нашем случае Reference и Position. Возвращаемся в окно приложения. В диалоговом окне Select Signals должен отобразиться выбранный сигнал. Нажимаем на кнопку Add Signal(s).
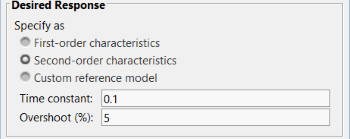
Задаем желаемый вид переходного процесса на панели Desired Response и соответственно вид передаточной функции процесса. Можно выбрать апериодический процесс (First-order characteristics), колебательный процесс (Second-order characteristics) или иной вид процесса (Custom reference model). Для нашего случая выбираем колебательный процесс.
В поле Time constant указывается постоянная времени (
 ) передаточной функции процесса в секундах. В поле Overshoot (%) — величина перерегулирования (
) передаточной функции процесса в секундах. В поле Overshoot (%) — величина перерегулирования ( ). Соотношения между постоянной времени колебательного звена и временем переходного процесса (
). Соотношения между постоянной времени колебательного звена и временем переходного процесса ( ) и коэффициентом демпфирования (
) и коэффициентом демпфирования ( ) и перерегулированием выражаются зависимостями [1]:
) и перерегулированием выражаются зависимостями [1]:


Таким образом, максимальное значение постоянной времени, удовлетворяющее требованию, составляет 0.1725 с. Укажем постоянную времени, равную 0.1 с. Также вводим требуемое значение перерегулирования во второе поле. Подтверждаем изменения.
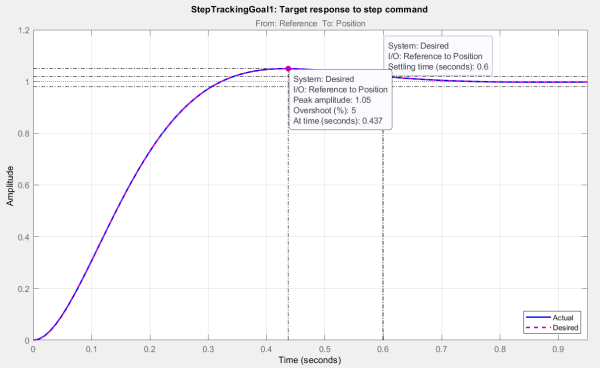
В появившемся графическом окне приложения можно видеть два переходных процесса: текущий, т.е. переходный процесс системы до настройки регуляторов, и желаемый, по заданной передаточной функции. Нажимаем на кнопку Tune для настройки регуляторов. Выбирая настраиваемые блоки на панели Data Browser в разделе Data Preview, можно просмотреть вид передаточной функции контроллера и подобранные параметры. При выборе текущей задачи настройки в разделе Tuning Goals отображаются входные и выходные сигналы системы, а также передаточная функция процесса. Ниже показаны характеристики переходного процесса. Видно, что эти значения соответствуют требуемым.
Для автоматического обновления параметров регуляторов переходим во вкладку CONTROL SYSTEM и нажимаем кнопку Update Blocks.

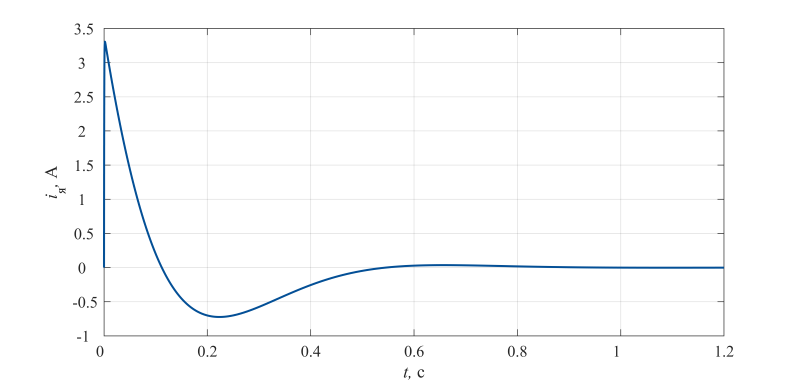
Результаты моделирования системы с настроенным регулятором для максимального уровня входного сигнала показаны ниже.