Привет, GT!
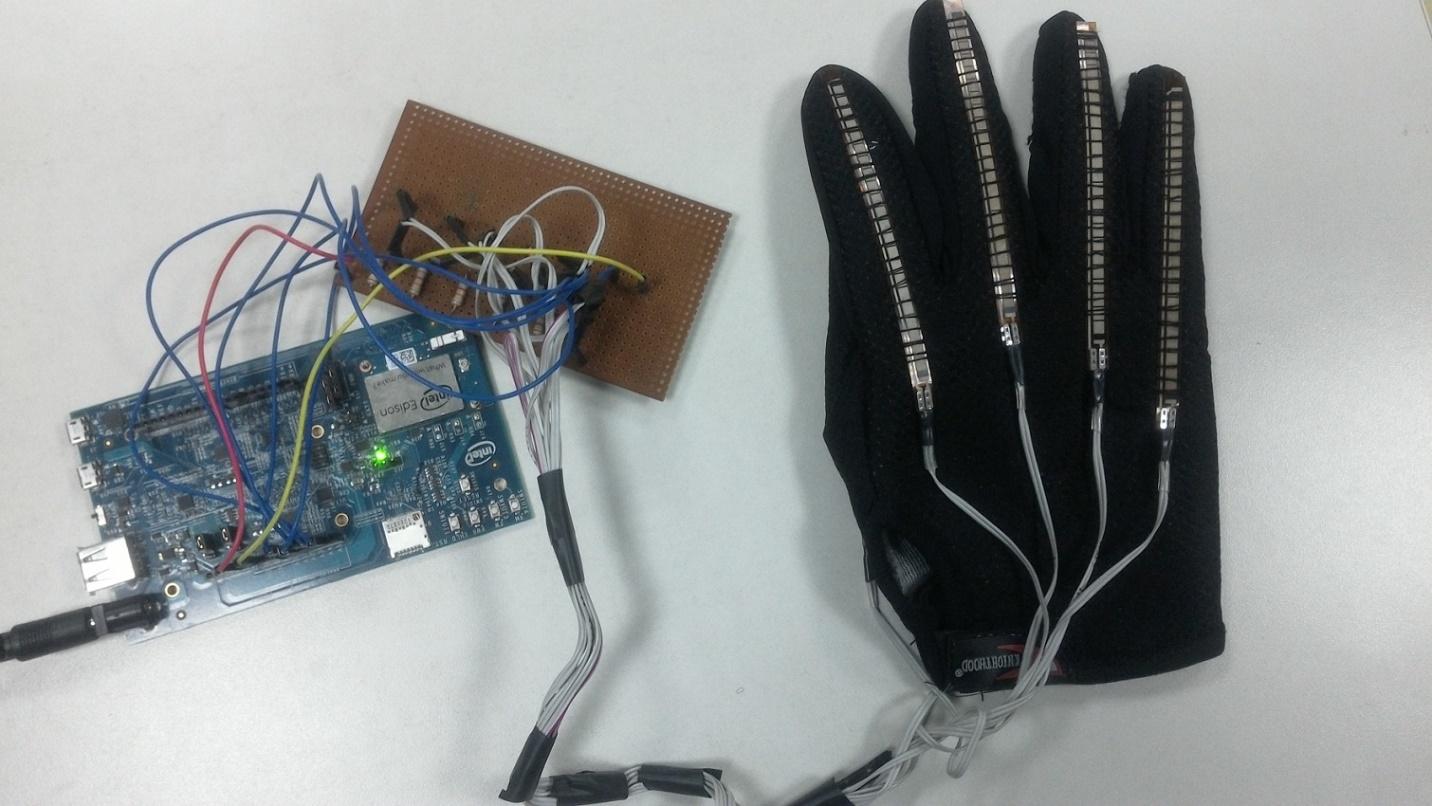
Если вы хотели бы сделать свой собственный «железный» модуль на Intel Edison, но не уверены, с какого бока к нему подступиться — этот текст для вас. Он — про особенности и мелкие нюансы создания своего устройства на Edison, без использования готовых отладочных плат Intel или Sparkfun.
Недавно у нас возникла специфическая задача: нам понадобился IoT-хаб (то есть шлюз между специфическими для «Интернета вещей» сетями 6LoWPAN и LoRa, которыми мы занимаемся, и внешним миром) на архитектуре x86. Наш стандартный вариант — это решение на нашем собственном микрокомпьютере Unwired One на архитектуре MIPS, но в данном случае был нужен именно x86.
Дело в том, что хаб у нас — это не просто транслятор из 6LoWPAN/LoRa во внешний мир всего, что с той стороны прилетело, а во-первых, небольшой сервер IoT-сети, который поддерживает её существование, раздаёт IP-адреса (при наличии в данной сети таковых) и занимается прочей технической работой, во-вторых, собственно border router из IoT во внешний мир, в-третьих, прослойка на уровне приложений, превращающая наши собственные протоколы IoT-сети в распространённый MQTT и унифицирующая сети разных видов, а в-четвёртых, платформа, на которой клиент может сам написать какой-либо интересный ему софт, проводящий накопление и обработку данных до отправки их на большой сервер, в облако и т.п.

Собственно, в последнем и возникла загвоздка. Проблема в том, что при всех разговорах о грядущей победе IoT, с ПО этого уровня в нём всё довольно плохо — его, если говорить коротко, нет. Стандартного, универсального, не привязанного к конкретной железке и не написанного на яве (да простят меня её поклонники, но когда у вас 256 МБ ОЗУ — это много, Java — так себе выбор).