
Фильтр Калмана
10 мин
Туториал
В интернете, в том числе и на хабре, можно найти много информации про фильтр Калмана. Но тяжело найти легкоперевариваемый вывод самих формул. Без вывода вся эта наука воспринимается как некое шаманство, формулы выглядят как безликий набор символов, а главное, многие простые утверждения, лежащие на поверхности теории, оказываются за пределами понимания. Целью этой статьи будет рассказать об этом фильтре на как можно более доступном языке.
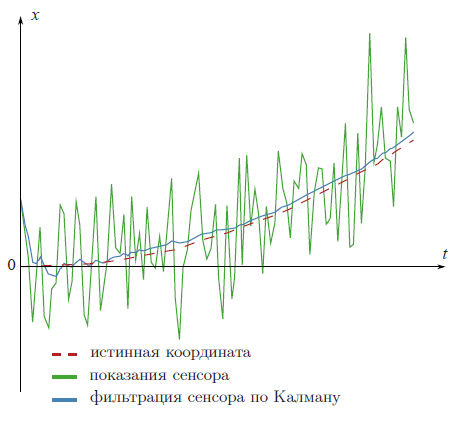
Фильтр Калмана — это мощнейший инструмент фильтрации данных. Основной его принцип состоит в том, что при фильтрации используется информация о физике самого явления. Скажем, если вы фильтруете данные со спидометра машины, то инерционность машины дает вам право воспринимать слишком быстрые скачки скорости как ошибку измерения. Фильтр Калмана интересен тем, что в каком-то смысле, это самый лучший фильтр. Подробнее обсудим ниже, что конкретно означают слова «самый лучший». В конце статьи я покажу, что во многих случаях формулы можно до такой степени упростить, что от них почти ничего и не останется.





 Один из сотрудников Google в 20% свободного времени разработал и выложил под свободной лицензией библиотеку
Один из сотрудников Google в 20% свободного времени разработал и выложил под свободной лицензией библиотеку 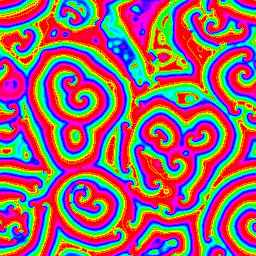


 Различные реализации игры «Жизнь» описывались на Хабре уже неоднократно. В этой статье, в качестве продолжения этой темы, рассматривается ещё один её вариант: в качестве игрового поля используется регулярная решётка на плоскости Лобаческого. Описываются общие методы использования плоскости Лобачевского в программах и необходимые для этого математические приёмы.
Различные реализации игры «Жизнь» описывались на Хабре уже неоднократно. В этой статье, в качестве продолжения этой темы, рассматривается ещё один её вариант: в качестве игрового поля используется регулярная решётка на плоскости Лобаческого. Описываются общие методы использования плоскости Лобачевского в программах и необходимые для этого математические приёмы.