К вопросу о тенденции
17 мин
«Если не знаешь, с чего начать, начни сначала, скорее всего, не ошибешься».
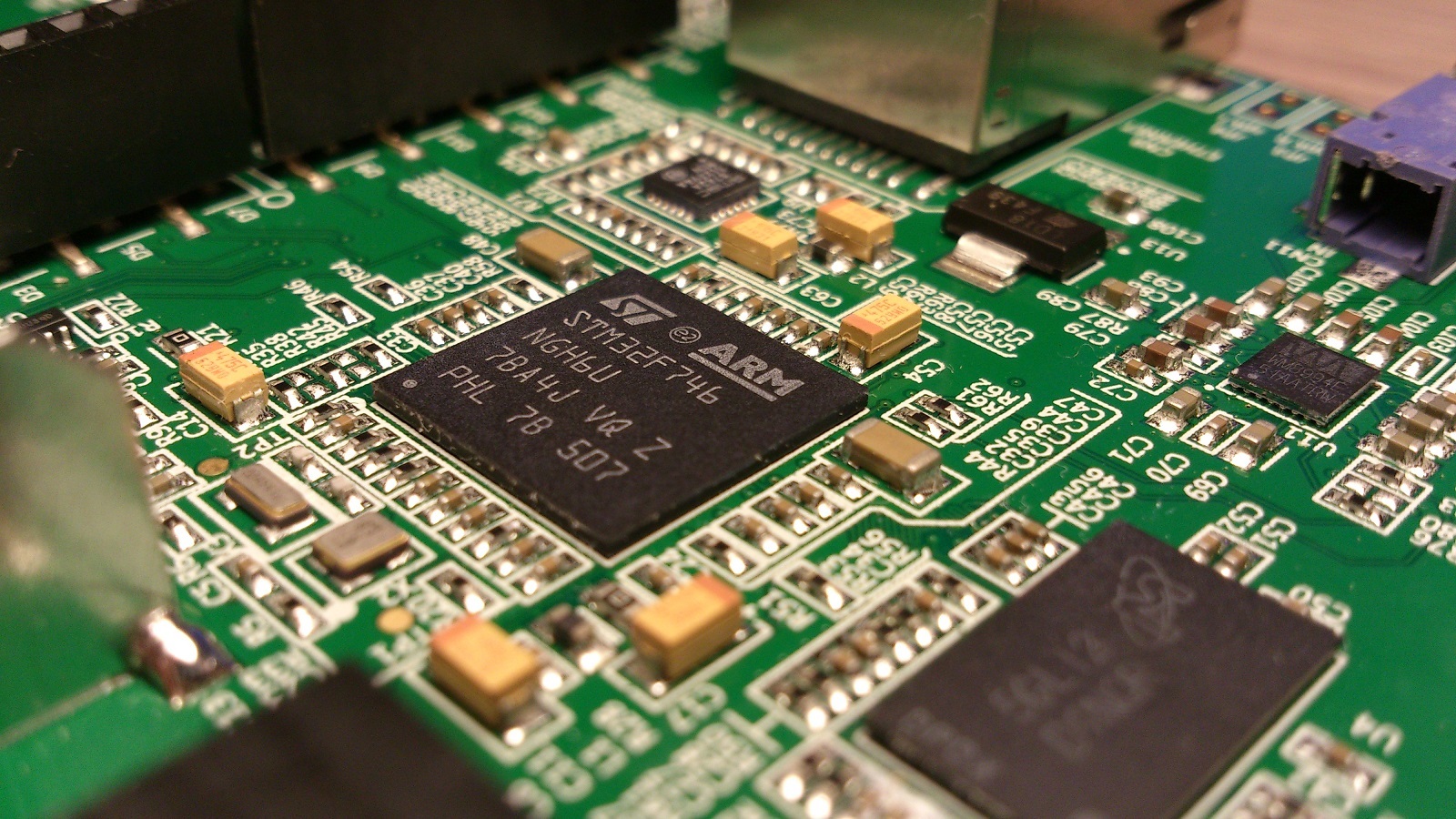
Итак, вначале было (нет не слово, а много слов) тема на одном из сайтов, посвященном любительскому проектированию электроники и программированию (кто сказал «Ардуино» — выйти из класса), называть его не буду, поскольку данная тема могла быть поднята на любом сайте такого профиля и посвящена была медленной работе некоей библиотеки (не будем показывать пальцем, хотя это был Слоненок, а именно LiquidDisplayI2C) на определенной аппаратной платформе. Тема показалось интересной (мои постоянные читатели уже поняли, что быстродействие — это мой пунктик) и, поскольку обсуждение ее (как часто бывает на подобных ресурсах) быстро превратилось в бросание бананами и выяснением, кто на самом деле крутой мачо, а кто так, на минутку зашел, и техническая сторона превратилась в исчезающе малую величину, было предпринято самостоятельное исследование данного вопроса, в процессе которого выяснилось несколько интересных обстоятельств, которые и предлагаются вниманию уважаемой публики.
 Здравствуйте! Сегодня мы познакомимся с новым семейством дешевых и малопотребляющих ПЛИС от Lattice Semiconductor семейств iCE40LP/HX/LM, научимся работать с фирменным компилятором iCEcube2 и редактором кода Sublime Text 3, а также программировать чип на отладочной плате Lattice iCEstick с помощью прошивки, написанной на SystemVerilog.
Здравствуйте! Сегодня мы познакомимся с новым семейством дешевых и малопотребляющих ПЛИС от Lattice Semiconductor семейств iCE40LP/HX/LM, научимся работать с фирменным компилятором iCEcube2 и редактором кода Sublime Text 3, а также программировать чип на отладочной плате Lattice iCEstick с помощью прошивки, написанной на SystemVerilog. 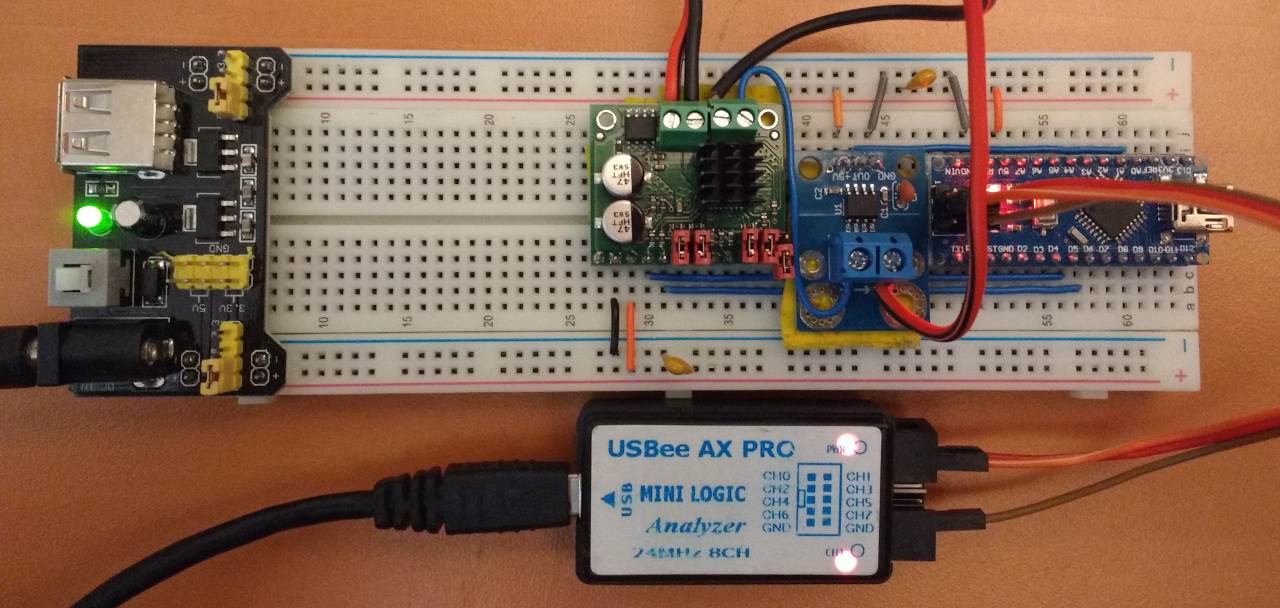




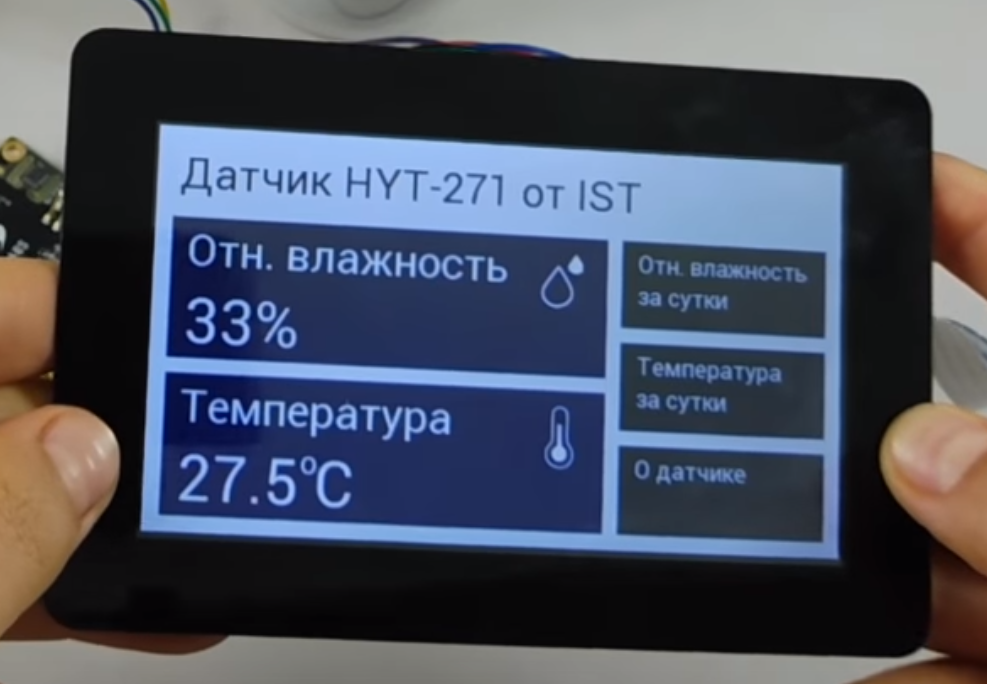
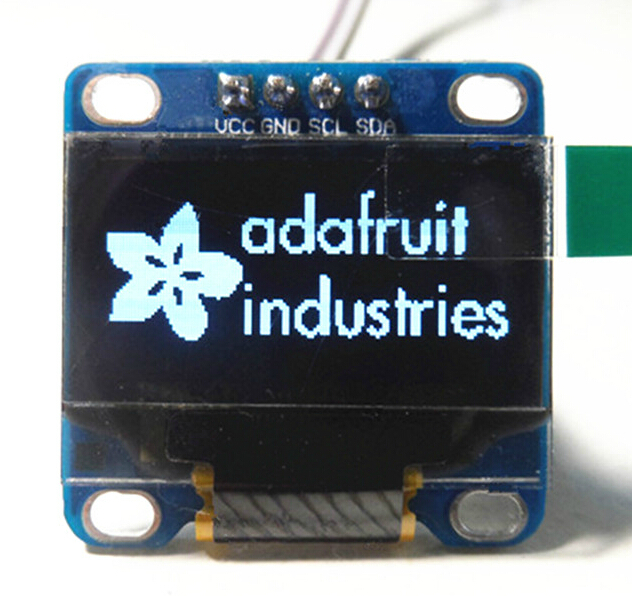 Многие, наверное, знают о таких маленьких дешёвых (меньше $3) OLED дисплеях, которые можно найти в огромном ассортименте на ebay или aliexpress. В интернете существует множество различных статей о том, как подключать эти дисплеи к Arduino и другим МК, но для STM32f10x затруднительно найти даже библиотеку. Поэтому я решил написать эту статью.
Многие, наверное, знают о таких маленьких дешёвых (меньше $3) OLED дисплеях, которые можно найти в огромном ассортименте на ebay или aliexpress. В интернете существует множество различных статей о том, как подключать эти дисплеи к Arduino и другим МК, но для STM32f10x затруднительно найти даже библиотеку. Поэтому я решил написать эту статью.