Комментарии 218
Основная проблема, которую преодолевают на пути к точности, физическая — нестабильность задержки электромагнитной волны в ионосфере
А уход опорного генератора тактовой частоты приемника? А тропосфера? Недостаточная точность эфемерид спутников?
Погрешность из-за ионосферы можно вообще не учитывать, если делать RTK между двумя приемниками на расстоянии до 10-20 км. Ионосферные задержки у обоих приемников будут одинаковы и просто вычитаются друг из друга.
Что касается SDR у Trimble — гм, маловероятно. Вероятнее передача частичной псевдодальности (корреляторы!!) и фазы в полуциклах. А вот расшифровка эфемерид, восстановление псевдодальностей до полной, сведение полуциклов в циклы — на стороне мобильника.
То есть обычное деление между ПЛИС и ARM. В том же NV08 довольно слабый ARM 7 сидит. Но корреляторы явно не в нем реализованы. В GEOS-3 корреляторы совсем аппаратно сделаны, ARM там тоже довольно слабый.
Обещают в этом году продавать какие-то SDK.
Спасибо за интерес и замечания по теме!
Strint имел дело только с GPS L1.
Еще у Микрософта есть проект CLEO по вычислению навигационного решения в облаке по выборке сигнала. Эта штука точно работает, проверено.
Максимальная скорость загрузки в LTE — 75,4 мегабита. То есть тупо не хватит никогда. Не говоря уж о том, что 75.4 мегабита — это 4 базовых станции, занятых только под передачу.
Кроме того, 40 мегабит на диапазон — излишне. Сигнал может быть и однобитным, тогда GPS, например, можно упихнуть в 8 мегабит прям по выходу АЦП (компаратора).
Далее, можно сделать преднакопление, т.к. доплер известен, диапазон ужмется в килобиты.
Длина бита GPS — 300 метров. Коррелятор выдает порядка 3 метров, то есть сотой доли бита GPS. и я не понимаю, как на потоке в 8 мегабит будет такая точность корреляции. Примерно то же самое и с фазой, точность определения доплера — 0.01 герца. Хватит на это 8 мегабит?
Но про время накопления сложно спорить. Правда, по-моему, это все еще связано с ОСШ. Мы считаем его более-менее одинаковым для всех приемников. Так вот, если повысить его неким образом в несколько раз, например, с помощью разнесенного приема, то, я думаю, во столько же раз можно снизить требования к потоку или к времени накопления. Что думаете?
А про прореживание, я пытаюсь донести идею, что для геодезии необязательна непрерывная запись сигнала в течении всего часа. Т.к. мы в сети, то наш опорник неплохо известен. Можно устроить большую скважность записи, пропорционально порезать поток данных в среднем.
Ну в общем я в этом не разбираюсь, приемники я не писал.
Так что если можно с одним разрешением фазовой неоднозначности — то все хорошо (соседние измерения мало информации несут для разрешения). А если каждый раз разрешаться — точность будет маленькая.
Но вот как удержать кольца слежения, если у нас оцифровка идет кусками — я не понимаю.
Но вот как удержать кольца слежения, если у нас оцифровка идет кусками — я не понимаю.
Давайте упростим себе задачу. Пусть у нас идеальный опорник, поведение которого мы можем предсказать. Можем ли мы с точностью в +-10 см предсказать наперед фазовое сигнальное время (дальность до спутника и т.п.)?
Ответ на вопрос, очевидно, зависит от того, насколько «наперед». Можно провести исследование, тогда мы получим ответ на вопрос «насколько можно прореживать выборку сигнала».
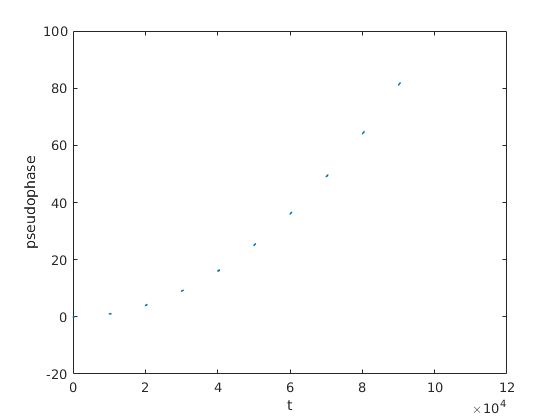
Например, если мы можем предсказать фазовое сигнальное время на 10 секунд вперед, то записываем, скажем, 0.5 секунды, остальные 9.5 выкидываем. По 0.5 секундной выборке двойным проходом получаем кучочек процесса неразрешенной фазовой псевдодальности. Имея с прошлого раза экстраполяцию (которая была точнее длины волны) восстанавливаем обратно разрешенную фазу.
Получим примерно такой процесс, по которому легко можно решаться и выделять систематические процессы:
Это где-то минимум минут 15. Быстрой статикой можно разрешиться быстрее, копим — и на каждой секунде смотрим, хватает ли для разрешения. Но это тоже пара минут минимум (лучше минуты 4-5).
Это цифры для одночастотного приемника? Я так понимаю, что если подтянем вторую частоту, то всё будет намного лучше?
Да, для одночастника, время разрешения с проверкой по второй базе. Типичное от 120 до 240 секунд. NV08 побольше, GEOS поменьше.
Для сантиметров — нужно фазовое решение. Или вы синхронизируетесь с точностью сильно меньше полуволны — или каждый раз заново ищите неоднозначность. Так что частота процессора тут очень даже причем. Вы же должны понимать, сколько целых волн пришло в паузе?
Давайте я напомню, что именно мы обсуждаем в этой ветке: можно ли сократить поток обрабатываемых сырых данных с АЦП от геодезического ровера за счет нарезки этих данных на небольшие кусочки с последующим выкидыванием некоторого их числа (прореживанием)?
Для наглядности, скажем: 500 мс выборка, потом 9500 мс выкидываем, потом ещё 500 мс и т.д.
По 500 мс оценить кодовую и фазовую псевдодальность можно. Но, если не применять дополнительных приседаний, то для каждого 500 мс участка придется заново разрешать фазовую неоднозначность.
Как можно избежать разрешения? Нам надо уметь экстраполировать псевдофазу на следующий интервал (который будет через 9500 мс).
Псевдодальность — разность сигнального времени (кодового или фазового) и времени приемника.
Время приемника можно пока оставить в покое (научиться синхронизироваться от сотовой сети, поставить водородник и т.п.).
Остается фазовое сигнальное время приходящего сигнала (полная фаза, иначе говоря). Она определяется движением спутника в основном. Можем ли мы на 9500 мс вперед предугадать изменение положение спутника с точностью порядка сантиметров? А на 1000 мс? А на 100000 мс? Если можем, то можем и «подхватывать» фазу в нужном цикле, продолжать давать решение. При этом имеем падение среднего цифрового потока в разы.
Положение спутника предугадать мы можем. А положение потребителя? Если мы стоим на месте, то нам первого решения хватит. Если движемся — то ничего предугадать невозможно.
Вдогонку: а что, если фазу не непрерывной считать, а дискретной, и вычисления свести к вычислению над полем Галуа?
3.1 Величина фазовой псевдодальности выражается в виде целого числа длин волн и дробной части длины волны. Дробная часть фазы может быть получена с высокой точностью, характеризуемой СКП на уровне первых единиц миллиметров. Прямое измерение целочисленной части фазы не представляется возможным, вследствие чего возникает неоднозначность фазовых измерений, требующая разрешения.
Решение действительно идет перебором с выяснением отношения качества лучшего решения к следующему. Когда это отношение превышает некий порог — считается. что мы разрешились. То есть разрешение неоднозначностей — процесс вероятностный.
Насчет поля Галуа не понял, не математик я.
Не очень понимаю, что именно вы не поняли. Мы рассчитываем неоднозначности один раз и дальше тянем фазовое решение. Если нам понятно, сколько прошло времени — мы знаем, что добавить в фазу, чтобы не разрешатся заново. Если знаем неточно — то увы…
Но, похоже, я тоже кое в чем неправ и если нарезать куски больше 6 секунд — то их можно наряжать неточно.
Кто будет отмерять выкинутые 9500мс? Какое устройство? А точность отмерки — очень важна для фазового решения. Она должна быть меньше половины длины волны. То есть меньше 0.3нс
Все шкалы времени в нормальном приемнике задаются его опорным генератором. От этого опорного генератора, в частности, тактируется АЦП. Скажем, тактовая частота 10 МГц. 5e6 отсчетов отправляем, 95e6 отчетов выбрасываем, потом отправляем ещё 5e6 отчетов. Как-то так))
Да, если не принять мер, у нас этот ОГ будет валять. Но с ним что-нибудь можно сделать — взять водородник (у него за 10 секунд отклонение фазы на 1.5 ГГц оборот не сделает), попытаться засинхронизироваться от сотовой сети и т.п. Этот мне как первичнику понятно. Интереснее ваш опыт точных эфемерид ;)
А с эфемеридами — всё пока в процессе. Но на 2 часа расхождение пока в полуметре при апроксимации по одной точке. То есть мы берем на одно время бортовые и точные эфемериды, вычисляем их разницу (поправку) и смотрим, сколько времени мы можем протянуть на этой поправке. Ну до следующей поправки (через 15 минут) в общем уже тянем с нужной вам точностью.
Ну до следующей поправки (через 15 минут) в общем уже тянем с нужной вам точностью.
Отсюда я делаю вывод, что такое прореживание потока можно без проблем устроить, если мы в качестве опорного генератора возьмем водородник и если нам не подгадят какие-нибудь ionospheric scintillation или другие процессы, вдруг резко меняющие наблюдаемую дальность по линии визирования.
Всё это для статики, конечно. И на 15 минутные паузы рассчитывать не приходится, за это время вальнет фазы на спутниках.
Осталось дело за малым — выкинуть из схемы водородник, заменить его на дешевое решение. Тут надо лезть в точность синхронизации в современных сотовых сетях.
Весь смысл статики — найти неоднозначность по большой матрице. Но для 10 см на спутник — нам уже нужно знать фазовое решение.
В итоге смысл статики после нахождения фазового решения просто непонятен.
Нужно отбить точку на плане (пенек на полянке в лесу). Расчехляем Trimble. Ставим на треногу, включаем, ждем минут 20.
Что происходит за эти 20 минут?
Ровер (в облаке от АЦП, по корреляционным суммам, по псевдофазам непосредственно в местном вычислителе/в облаке — это вопрос реализации и спора на шоколадку) начинает обрабатывать сигналы. Так или иначе он их находит, переводит на слежение, синхронизируется, начинает формировать псевдофазы и псевдодальности. На это у него уходит порядка минуты.
Вот мы имеем псевдофазы и псевдодальности от 10-20 спутников. Учитываем тропосферу, ионосферу и т.д., получаем float решение и его ковариационную матрицу.
Если приемник двухчастотный, то ионосферу мы отсеили хорошо, ковариационная матрица приличная, мы почти сразу с помощью LAMBDA разрешаем неоднозначость, получаем fixed решение. Это если нам повезло с многолучевостью, иначе немного ждем.
Весь смысл статики — найти неоднозначность по большой матрице.
Я эту фразу понимаю так. Если приемник одночастотный, то LAMBDA с ходу может и не сойтись. Тогда в матрицу начинаем запихивать измерения для нескольких моментов времени для получения избыточности.Так?
Оставшееся время ровер стоит усредняя разные картины многолучевости. В статике в 10-20 минут как раз войдут несколько периодов многолучевости.
Всё что написано выше, только кратко: по моему мнению, ровер оставляют в статике ради того, чтобы он успел пронаблюдать процессы с большим временем корреляции (многолучевость, спутниковое созвездие).
Малое время накопления чревато ложными решениями. При этом соседние измерения — хорошо коррелированы друг с другом. Как там по двум частотам не знаю, а при решении по одной частоте ложное решение может держаться секунд 15. А вот суммарная матрица — имеет намного меньшие шансы для ложного решения. И чем за больший период мы накопим — тем большая вероятность истинного решения.
Но то, о чем вы говорите — тоже имеет место.
Вообще у геодезии довольно сильная нормативная база. как пример ГКИНП 01-271-03 «Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС/GPS»
У микрософтовского CLEO выборка 2 мс и через 20 мс следующая. Вот у них можно что-то тянуть от предыдущей выборки.
Но ни те, ни другие не делают RTK. Пока по крайней мере.
Вот функции CPU они и выкинули на мобильник.
Устройство 1879ВЯ1Я видели?

Нижняя часть схемы легко выкидывается на мобильник. А вот верхней (собственно SDR) — нужно не только быстродействие вообще, но ещё и малое время реакции. Если идет рывок — надо быстро развести кольца слежения. Быстро — это думаю, что до 10мс.
Геодезисты пишут ещё жестче:
"Антенка" Catalyst DA1 это не что иное как сетевой ровер с ограниченным списком принимаемых поправок за близкую к себестоимости цену.
Размеры: диаметр 130мм, высота 60мм, вес 300грамм.
Порты 1 x micro USB для передачи данных, 1 x micro USB для внешнего питания.
Принимаемые сигналы: GPS: L1C/A, L1C, L2C, Galileo: E1, Trimble: RTX SBAS: QZSS, WAAS, EGNOS, GAGAN
Поправки формат: Trimble RTXTM, Trimble VRSTM, SBAS
Частота: 1Hz, 5HzНу то есть обозвали приемник «цифровой антенной» и продают поправки как сервис. Причем по такой цене, что выгоднее купить нормальный ровер.
У Trimble в России есть разработчики. Пора им тут высказаться)
С точки зрения маркетинга, геодезистам будет выгодно покупать точность только в те месяцы, когда она им нужна. Следующий уровень — платить не за время, а за навигационные отметки.
А потом себестоимость приемника — это больше плата софт, а не за железо. Железо при массовом тираже стоит копейки. Мобильник на андроиде можно купить за 40 баксов, и это не себестоимость, а продажная цена. Так что цена железа — баксов 10, не больше. Все остальное — оплата за софт и разработку.
Исключение — антенны. Дешевых геодезических антенн не бывает… :-)
Значительное удешевление антенн возможно при большом количестве.
Это согласуется с ценами на GEOS-3 и U-Blox. Продажные 15-20 баксов, себестоимость 7-10 баксов.
Дорогие части у нас в антенне — это сам приемный элемент и полосовой фильтр.
Насколько дешевой может быть RTK-антенна при массовом производстве? И почему этого пока никто не сделал?
Антенну можно сделать за несколько долларов. Особенно будет хорошо, если интегрировать ее сразу с модулем. Но нужны количества в порядках десятков тысяч.Я думаю, Tallysman уже сделал это)
Тут главный вопрос — куда деть потом эти десятки тысяч? Кому оно надо столько штук?
Речь ещё о том, какой именно RTK нужен. У GEOS чистая фаза, но много слипов. Более того — полуцикловых слипов. Автор обещал побороть, пока что ждем. У NV08 слипов мало, но шум фазы побольше.
Наш выбор: для статики лучше NV08, для динамики (собственно RTK) — GEOS.
Для темы борьбы с помехами навигации важно, что NT1065 позволяет преобразовать в цифру синхронно четыре канала. На его базе можно строить пространственные компенсаторы помех.
А ещё при работе с NT1065 мы заметили на спектроанализаторе достаточно сильную третью гармонику, что немного огорчило
А про третью гармонику можете подробнее рассказать. Как ее смотрели?
Подавали гармонику на вход с частотой ±1590 МГц и смотрели выход спектроанализатором. На сколько она была ослаблена относительно основной я не помню, но, если интересует, в понедельник спрошу у коллег.
Гораздо больше поразило при работе с этим РПУ следующее:
1. На выходе тактового сигнала стоит трансформатор, который режет клок с частотой меньше ~40-50 МГц. Такой трансформатор стоит на старой отладочной плате (которая без встроенного USB) и, если судить по документации, на новой.
2. Если на вход подавать одну гармонику, то при включённом АРУ практически нет разницы, какие настройки фильтра установлены. У нас получилась полоса фильтра порядка 70 МГц при установленных 11. Связались с белорусами и узнали, что дело в АРУ и полосы фильтров указаны при фиксированных значениях усиления.
Я вот прямо сейчас снял спектры, подав частоту 1587 МГц. На первом уровень сигнала такой, что гармоники еще не вылезают из-под шумов.
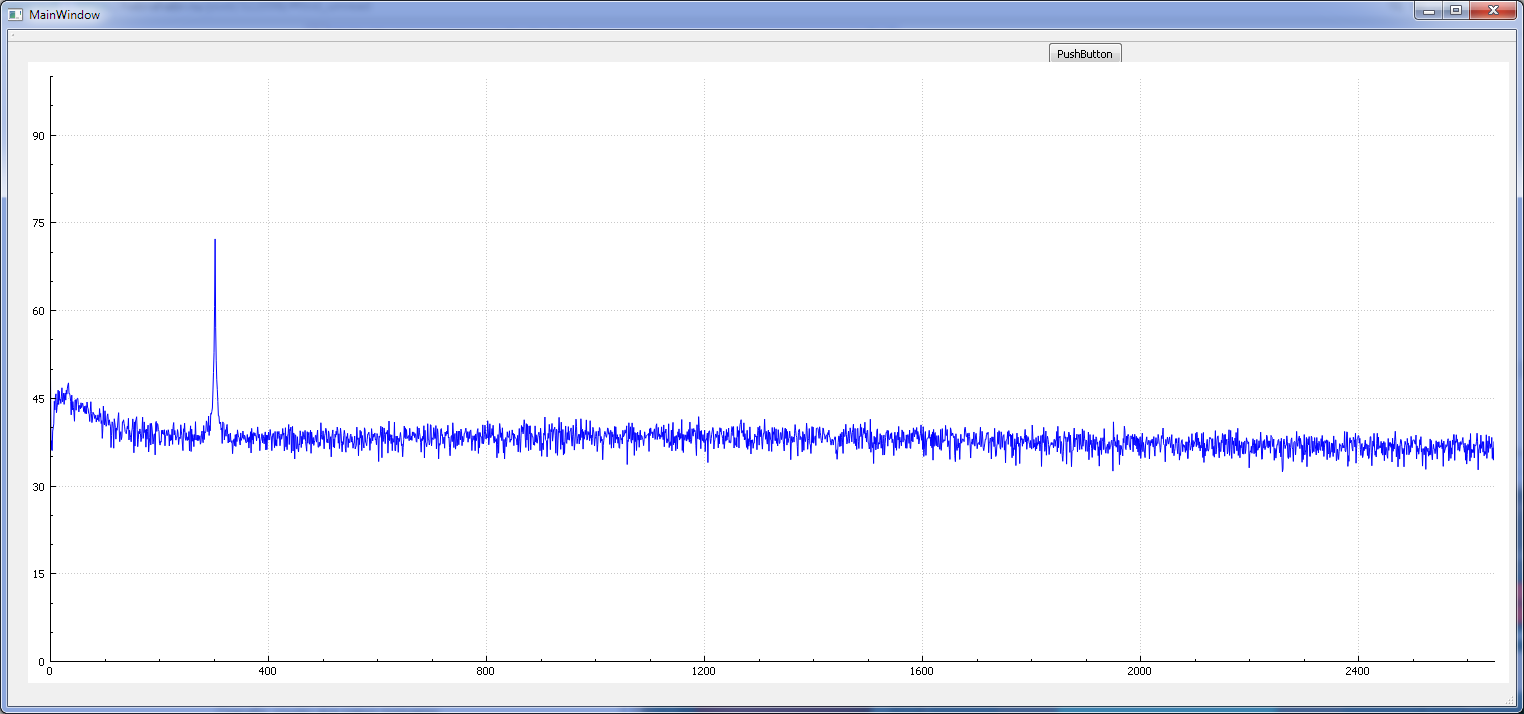
На втором уровень сигнала на 10 дБ больше и помехи уже вылезают из под шумов.
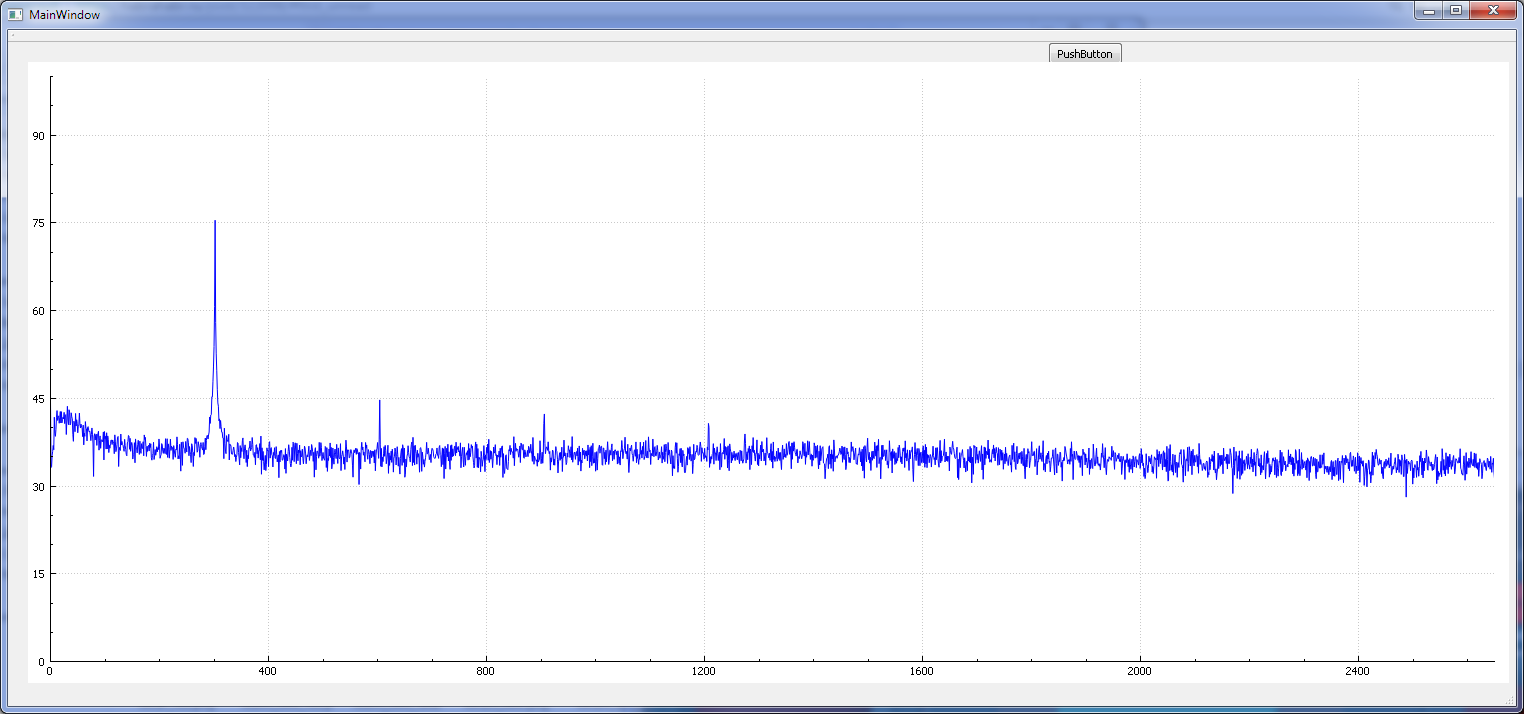
В гармониках самое хорошее то, что они уменьшаются быстрее, чем уменьшается основная сигнал. Таким образом при уровнях на входе менее некоторых, влияние гармоник будет незначительным. Это демонстрируется графиками спектра.
1. Что касается трансформатора на клоке. Клок можно вывести в режиме CMOS, но тогда его гармоника наводится на вход РПУ и снижает характеристики при работе в некоторых диапазонах частот. При клоке LVDS наводка меньше, поэтому у них там стоит трансформатор. У меня на плате стоит LVDS-преобразователь, который пропускает и маленькие частоты. Они, видимо, посчитали непрактичным использование частот дискретизации менее 40 МГц. Я пока тоже не сталкивался в надобностью маленьких частот дискретизации.
2. Измерить АЧХ фильтров в режиме АРУ нельзя в принципе. Собственно, они Вам об этом и сказали. АЧХ фильтров у них приведены в даташите. Я их проверять не пробовал, верю им на слово. Да и вопрос это для обычного приема не очень важный, дальше все равно навигационный сигнал фильтруется. Для практической помехозащиты это имеет значение. Если Вы выявите несоответствие полосы заявленной, прошу сообщить общественности.
Большое спасибо за интересные комментарии!
Если я правильно помню, то при уровне входного сигнала порядка -70 dBm третья гармоника была сильнее. Увы, сейчас не могу проверить, дома нет оборудования.
2. «Дальше навигационный сигнал фильтруется». Какую фильтрацию вы имеете в виду? Хотелось бы узнать поподробнее.

И попробуйте для сравнения подать два близких тона.
Надо аккуратнее покрутить модели, т. к. мои качественные оценки могут плохо работать при низких уровнях квантования. Обычно всё упирается в disturtion, а в вашем случае упирается в noise. Поэтому формально коэффициент подавления помехи может оказаться высоким, но кого это волнует, если суммарная мощность помеха+шум будет меняться слабо?
Если посчитать SINAD, то там около 10 дБ получается. Палка на спектре действительно торчит на 30 дБ в случае одного сигнала. Но это палка, а нас интересует соотношение мощностей.
Согласен, SINAD в основном за счет шума близок к указанному. Но соотношение каких мощностей нас интересует? С мощностью сигнала все понятно, а вот мощность шума в какой полосе брать? Вы в какой полосе предлагаете рассматривать мощность шума?
И попробуйте для сравнения подать два близких тона.
Не могу технически, да и нет смысла. Вы считаете, что если я подам второй сигнал на 20 дБ меньше первого, то не смогу различить их на спектре? Если так, то я напрошусь к коллегам на хороший двухчастотный генератор.
Обычно всё упирается в disturtion, а в вашем случае упирается в noise. Поэтому формально коэффициент подавления помехи может оказаться высоким, но кого это волнует, если суммарная мощность помеха+шум будет меняться слабо?
Опять тот же вопрос: шум в какой полосе? На приведенном мной спектре полоса одной точки спектра около 60 кГц. Я могу выбрать один фильтр (одну точку спектра), настроить туда сигнал (помеху) и увеличивать ее от уровня шума до перегрузки на 30 дБ. Таким образом, суммарная мощность помеха+шум на выходе этого фильтры изменится на 30 дБ.
Согласен, SINAD в основном за счет шума близок к указанному. Но соотношение каких мощностей нас интересует? С мощностью сигнала все понятно, а вот мощность шума в какой полосе брать? Вы в какой полосе предлагаете рассматривать мощность шума?
В полосе навигационного сигнала.
Вы считаете, что если я подам второй сигнал на 20 дБ меньше первого, то не смогу различить их на спектре?
Уже на двух тонах картинка будет ужасна. Вы ведь компенсатор ни ради гармонической помехи делаете? Для её режекции антенная система не нужна.
В полосе навигационного сигнала.
Таким образом, для сигнала GPS мы теперь можем добавить к 10 дБ динамического диапазона АЦП еще около 10 дБ (25/2 МГц, 25 МГц — половина частоты дискретизации АЦП, то есть полоса по которой размазан его шум). Я правильно понимаю? Вы с этим согласны? Это уже 20 дБ динамического диапазона.
Уже на двух тонах картинка будет ужасна.
Картинка сильно не изменится. Второй сигнал будет меньше первого на 20 дБ и мощность на входе почти не изменится. Ради науки, напрошусь на двухчастотный генератор.
Вы ведь компенсатор ни ради гармонической помехи делаете?
Ни в коем случае не ради гармонической. Просто между гармоническим анализом (фильтром) и «кодовым анализом» (коррелятором, согласованным фильтром) есть полная аналогия в данном случае. Но на гармонических сигналах проще понять суть процессов. И есть картинка гармонического спектра сигнала, снятого с выхода приемника.
Но это все философия. Основной вопрос про 20 дБ. Есть у нас с Вами общее понимание? Стал динамический диапазон около 20 дБ?
Компенсатор, что временной, что пространственный — декорреляторы. Они переваривают входной процесс в белый шум, условно говоря. В представленной выборке соотношение коррелированного процесса к некоррелированному в интересующей нас полосе — порядка 10 дБ. Примерно столько мы можем выиграть с помощью компенсатора.
Второй сигнал будет меньше первого на 20 дБ и мощность на входе почти не изменится.
Я имел в виду эксперимент другого характера. Подать два тона одинаковой мощности как первый шаг к широкополосной помехе. Насколько я помню, они уже должны дать distortion на уровне -10 — -15 дБ от величины тонов.
Я имел в виду эксперимент другого характера. Подать два тона одинаковой мощности как первый шаг к широкополосной помехе. Насколько я помню, они уже должны дать distortion на уровне -10 — -15 дБ от величины тонов.
Заодно и это можно проделать. Решено.
Компенсатор, что временной, что пространственный — декорреляторы. Они переваривают входной процесс в белый шум, условно говоря. В представленной выборке соотношение коррелированного процесса к некоррелированному в интересующей нас полосе — порядка 10 дБ. Примерно столько мы можем выиграть с помощью компенсатора.
А вот здесь надо разбираться. Мы задались полосой C/A-кода GPS. Как у Вас получилось 10 дБ? По моим расчетам будет около 20 дБ.
Я прошу, для общего развития, дайте ссылку на китайцев с двухчастотными модулями за 1500.
А про каналы они пишут не про те, что делает NT1065. Они пишут про каналы приема спутников, которых на одной частоте может быть тьма. А NT1065 — это радио-каналы, про радио-каналы обычно ничего не пишут. На каждом радио-канале может висеть много каналов обработки сигнала спутников. Поэтому у них, скорее всего, там по одному NT1065 и по одной FPGA.
Но вот в чем беда… Теоретически в небе видна треть группировки, то есть 10-11 GPS и 8 ГЛОНАСС. Практически у низколетящих спутников слишком большие шумы для точной и высокоточной навигации. А если отсекать по углу места в 15 градусов, то остается максимум четверть группировки — 8 GPS, 6 ГЛОНАСС, 3 GALILEO (из 13 запущенных). После запуска всей группировки GALILEO будет 8+6+8=22 спутника. Все остальное — больше для понтов.
То есть кому-то хочется принимать все (включая ложный кросскорреляционный прием, низкие спутники, помехи....) и он делает сотни каналов. А уж потом — фильтрует результат на мусор и нормальные данные. А кто-то предварительно (по альманахам) настраивает каналы на прием нужного спутникового сигнала. И тогда 22 — вполне хватает.
Что касается частотных каналов, то все GPS L1 и GALILEO Е1 — это один частотный канал, 1574 Мгц. Так что 4 частотных канала — для GPS/ГЛОНАСС/GALILEO достаточно.
Что касается радиомикросхемы — это некая внутренняя информация, но сильно похоже на правду. Увы, не все можно писать в открытых местах.
Прием дополнительных спутников даст повышение точности, но только когда речь идет о достаточно высоких спутниках. Низкие спутники — скорее ухудшат решение.
Сколько всего спутников может одновременно принимать чип NT1065? Если можно скриншот и лог записи
Поржал. @ itsar, пожалуйста, передайте этот анекдот в NTLAB, пожалуйста.
NТ1065 — это всего-лишь ВЧ-часть. Усилитель, гетеродин, смеситель, детектор + АЦП. Вопрос не в том, сколько он может принять (он примет все), вопрос в том, сколько спутников могут одновременно передавать на одном частотном диапазоне. Это где-то примерно 256 для CDMA и 20 для FDMA.
Скриншот записи — смотрите вверху статьи. Ещё раз. NT1065 — это не приемник, это одна из деталей, из которых строится приемник.
А в количестве спутников есть одна загвоздка. Если крен/тангаж носителя значительны и быстро меняются, то следует, по-моему, следить за всеми спутниками в полунебе, да и еще за теми, которые в него только влетают.
Это не так важно для компаса (угломера) — мы работаем по разности сигналов от двух приемников. Но для автономного режима сантиметровой точности — оно очень важно… Судя по статье — там задержки порядка десятка метров. То есть очень большие.
Количество спутников вы сильно переврали. Хотите разбор?
Кроме GPS (28 спутников) GAlilelo(18 ) и ГЛОНАСС(24) есть еще BeiDou(22) и геостационарные, с которых идет вещание поправок
Берем вашу ссылку. По ссылке GPS 31 — у вас 28. А вот реальные данные на сегодня по GPS и ГЛОНАСС. Как видите, 28 в вики (и 27 в реальности) это общее число спутников ГЛОНАСС, включая резервы, летные испытания и испытания Главного Конструктора.
По ГАЛИЛЕО. На орбите их 18. Но если глянуть в ту же вики, то выясняется, что работают 11. Смотрим в оперативную сводку — там тоже 11.
Теперь смотрим Beidou по вики. Всего 20 работающих спутников из них 6 геостационарных, 6 на обычной средней орбите и 8 низких.
Что касается SBAS — то нам нужен всего один спутник для приема поправок. Ну нет смысла одно и то же принимать с 6 спутников.
Сможет NT1065 принимать сигналы одновременно из начала и конца диапазона 1598 — 1605.4 МГц, если да, то что будет с чувствительностью?
ДА, сможет. С чувствительностью — ровно то же, что и у других приемников. Это стандартная схема построения приемников. Может 25 лет назад и делали по АЦП на частотный канал в военных приемниках с их немереной ценой (могу уточнить), но в массовых никто так не делает. Выделять отдельный частотный канал для каждой литеры ГЛОНАСС имеет смысл только, если для него делать отдельный ПАВ-фильтр. А ПАВ-фильтр — это очень дорого и не сильно компактно.
Сейчас ПАВ-фильтры ставят исключительно в антенны. Этим и отличается антенна GPS L1 от GPS+ГЛОНАСС L1 — в первой ПАВ-фильтр узкий, только на GPS, во второй — или один фильтр пошире (от 1570 до 1609) или два фильтра.
- Dual Frequency RTK GPS L1/L2
- simultaneous tracking of L1 and L2 signals from up to 22 satellites.
- «Hardware-ready» для всех остальных спутников.
- RF front-end and the Xilinx Zynq 7020 system on a chip
Думаю, что вы согласитесь, что для GPS+SBAS 22 канала выше головы. Каналы у них софтверные, будет мало — добавят. Думаю, что на этом спор про Piksi закончен. Разобрались. Моя вина — не глянул, что остальные системы — всего лишь hadware ready,

8 GPS + 6 ГЛОНАСС + 3 GALILEO = 17 спутников.
Тонкостей 3:
- Из SBAS не нужен, ионосферные поправки мы считаем сами, ибо двухчастотник.
- GPS без L2C выкидываем. Он будет только портить двухчастотные измерения.
- Не учитываем BEIDOU (я просто не знаю как с ним работать, их там 3 типа на разных орбитах и точность эфемерид мне непонятна).
Если считать, что приемник не гражданский, то есть принимает L2W, то будет на 4 GPS больше. То есть 21 канал.
С учетом того, что они в любой момент могут увеличить число каналов, просто поменяв прошивку — это решение правильное.

Видим группу G16, G22. G10. Они примерно по одному азимуту. Из них лучше всего взять G16, остальные низкие и вряд ли увеличат точность (а могут и уменьшить). Аналогично из группы G1 и G23 — лучше взять G1.
При выборе спутников и ограниченном числе каналов я бы сделал так
1) SBAS не нужен — у нас двухчастотник
2) По одному высокому спутнику каждой системы для опоры. Итого 3 канала
3) Делим круг на 16 секторов, в каждом секторе берем спутник, ближайший к 30-40 градусам угла места. Итого — 16 спутников.
В итоге получается 19 каналов.
Разумеется, я не математик, а программер. И могу ошибаться. Но из моего опыта — так.
ГНСС плата NovAtel ОЕМ638
(ГЛОНАСС,GPS, L1/L2/L5, SBAS/L-Band/QZSS, RTK-Base/DGPS, поддержка сервиса дифф. коррекций TerraStar, GL1DE/RAIM, выдача сырых данных и решений 20Гц, NTRIP)
Цена — более 9000 уе.
Что из этого надо выкинуть, чтобы опуститься хотя бы до 1500?
Или не париться, а просто написать запрос на цену продавцу?
Большое спасибо за информацию!
Все перечисленные платы лучше Piksi в техническом плане. Но Swift предлагает простое решение, понятное всем, кто хочет побаловаться RTK, а не только матерым геодезистам.
Это как разница между старт-китом Atmega и Arduino: простота покупки, простота начала работы, человеческая поддержка и т.п.
Думаю, что все геодезические монстры с легкостью опустят ценник и до $200 за плату. При одном условии — если вы дадите им большой рынок. Конторы типа Swift'а не имеют каких-либо технологических преимуществ по сравнению с тем же Trimble. Вот только Trimble разработки приходится отбивать продажами, а Swift живет на деньги инвесторов. Легко прикинуть, исходя из себестоимости модулей и количества человек в команде, что они в глубочайшим минусе по прибыли. Те $15 млн, что им дали инвесторы, они должны проесть года за два-три, по моим оценкам
Если быстро съехала на метр — это катастрофа. В обычных случаях такие вещи происходят медленно и будут отслеживаться другими системами.
Роботам без точного позиционирования не выжить никак)
Я согласен с Вами в том смысле, что маркетологам нужно будет хорошо поработать, чтобы продать высокую точность массам. Это большая отдельная тема. Мне же интересна техника и направления ее развития. О чем и пою)
Есть ребята, которые используют мою совсем другую плату (АЦП для КВ приемника), где скорость потока около 250 МБайт/с. Так вот, у них при всплесках нагрузки появляются пропуски. При стабильной средней нагрузке пропусков нет. Это и на Винде, и на Линуксе. Сейчас они отдыхают, чтобы с понедельника полезть в драйвер Линукса.
Я знаю народ, который принимает из USB3 360 МБайт/с, закрывает глаза на возможные пропуски и их система работает, так как пропуски случаются редко и не влияют на систему.
Может ребята из НТЛаба что-то смогут здесь добавить. У них тоже есть плата с USB3.
Для оценки движения стенок шлюза — нужна точность лучше 5 миллиметров СКО, само движение стенок в норме — пара сантиметров на цикл наполнения и опорожнения шлюза.
На стройке… ну скажем отклонение Лахта-центра от вертикали контролируется методами GNSS с тем же 5 миллиметров СКО.
И так далее… Мир не заканчивается системами автовождения, они лишь очень маленькая часть…
- Дешево
- Автоматически (без участия человека)
- Почти 24 на 365
Глобальность есть только на море и в небе. А в городком каньоне — многолучевость. Небо почти закрыто и куча отраженных сигналов от зданий. И это ставит крест на высокоточной навигации.
Если хотите пример высокоточной системы на движущихся объектах — это морской спутниковый компас. Гирокомпас — стоит 10 миллионов, магнитный — от миллиона, спутниковый — полмиллиона. Цена магнитного определяется тем, что судно железное и его собственные магнитные поля сильно мешают.
Ну и как везде: чем больше тираж — тем меньше цена. Использование PPP в навигаторах — думаю, что будет. Субметровая точность в тех же автомобильных навигаторах — тоже не вижу ничего невероятного. Сантиметров на улицах не добиться (многолучевость!), но вот полосу дороги уже можно будет определять напрямую…
Ну вот вам история. Садимся в машину, девушка включает навигатор. Он командует «развернитесь», девушка сдуру начинает искать разворот. А причина — навигатор на стоянке не понял, на какой мы стороне улицы. Точности не хватило.
Ну и много бестолковых команд «перестройтесь в левый ряд». Зачем? Мы и так в левом ряду едем.
Так что участок в 100 метров — ну да, какие-то сбои даст. Но это будет 0.1% от нынешних сбоев. В целом субметровая точность (30-50 см СКО) автонавигатору полезна. Так что это будет массовый продукт.
Если будет массовая точность, то будут и карты. Не будет так, что точность останется без карт.
Достаточно того, что в 95% случаев полоса будет определена верно. Переменная разметка — это проблема лишь трехполосных шоссе с обгонной полосой.
В целом — вы неправильно понимаете задачи. То есть какой уровень системы за что отвечает. Такое впечатление, что вы никогда не водили машину с навигатором. Ну или вообще никогда не водили.
P.S. Вы зонтом тоже не пользуетесь лишь потому, что раз в 3 года его может унести ветер?
А круги — да, приходилось делать (в чужом городе), когда навигатор вовремя не предупредил о смене полосы. Потому как без него — просто вовремя не догадаться, из каких полос куда поворот разрешен.
Но вариант «взять такси и перегрузить туда 30 килограмм вещей» устраивал ещё меньше. Так что да, делали кольца в районе Тимирязевской.
Полностью автономные роботизированные такси компания собирается представить к 2018 году.
В настоящее время каждое авто требует присутствия человека: в такси обязательно находится инженер NuTonomy, который следит за работой автоматики и безопасностью, а также может в случае необходимости взять на себя управление.
А вот и США:
Сообщается, что во всех таких машинах будут находиться инженеры Uber, которые отследят работу системы автопилота и смогут в случае необходимости взять на себя управление автомобилем.
Думаете они ездят без GPS? Очень сильно ошибаетесь. Считать перекрестки — очень тоскливый и глючный метод.
Ваша проблема в том, что вы не различаете навигацию и вождение. То есть работу водителя и штурмана. Почитайте про ралли, там навигацией занимается отдельный человек.
https://geektimes.ru/post/283714/
http://kommersant.ru/doc/3131164
http://kommersant.ru/doc/3071985
http://kommersant.ru/doc/3070975
http://kommersant.ru/doc/3046877
http://tass.ru/ekonomika/3760176
Кто сидит на водительском кресле? В машине находится опытный оператор для соблюдения закона о передвижении беспилотных автомобилей и для обеспечения комфортной поездки.
Остальное и смотреть не стал. Не путайте заявления маркетологов с реальностью. Вот когда машина поедет вообще без человека. И не 100 метров с парковки, а часа два — вот тогда и заявляйте о беспилотном вождении. Только навигация там все равно на GPS будет.
Это будет первый частный термоядерный реактор в США. На его разработку выделили 500 миллионов долларов.
Tri Alpha Energy, Inc. (TAE) is an American company based in Foothill Ranch, California, created for the development of aneutronic fusion power. The company was founded in 1998, and is backed by private capital.
Помните, были одночастотные мобильники? Одни на 900 мегагерц, другие — на 1800. У меня вот 15 лет назад был мобильник на 1800. И я искал оператора с базовыми станциями на 1800 Мгц.
Ну и где теперь одночастотные мобильники? Хоть один найдите? Ровно то же самое будет с одночастотным GNSS. Вымрет как класс. Как почти вымерли GPS-приемники — теперь почти всё принимают и GPS и ГЛОНАСС.

Видеокамере нужна мачта, с крыши машины ряд плохо виден. И любая видеокамера стоит дороже тех 10-20 долларов, что стоит добавление GNSS в мобильник. Там нужны большие мощности для обработки изображений.
Давайте не путать удерживание в полосе (это действительно проще сделать видеокамерой в районе фары) с определением, по какой полосе мы едем и не надо ли нам перестроится для поворота.
Плюс хитрые задачи отстройки от неравномерности вращения земли и неравномерности силы тяжести…
А с контролем полосы по светофорам и знакам — ещё смешнее, чем с GPS. GPS-навигаторы базируется на спутниковых снимках, и они могут обновляться раз в 12 часов (а иногда и чаще, Нью-Йорк на гуглокарте обновляется раз в 5 минут с геостационара). Но светофоров и знаков там не видно. Видно полосы — по идущим машинам. Но увы, не светофоры. И лучше не сделать, там атмосфера мешает.
Так что никуда вы от GPS-навигации не денетесь.
И даже при фиксированной машине — будет и приличный дрейф осей и кросскорреляция. То есть нажатие на тормоз воспримется как ускорение по всем осям, а не только по продольной.
Так что увы, подстраивать оси вам придется раз в минуту.
Что касается определения полосы при помощи положения светофоров. то вопрос в том, что будет с вашей системой, если светофор перевесят.? И откуда она возьмёт верное положение светофора? Светофоры — они не только на краях дороги, они ещё и над полосами висят иногда. Или на лапе над первой полосой.
На гироскопе вы переход с полосы на полосу не отследите. Для него что поворот, что перестроение — все примерно едино. Нужен акселерометр.
Хорошо, что вы поняли, что с задачей калибровки осей вы не справитесь. Акслерометры надо выставлять фиксированно, один по продольной оси машины, другой по поперечной. Ну и гироскоп ло кучи. Полной отстройки у вас не будет, то есть в поперечном канале будут сигналы и при разгоне и при торможении. И выделить именно поперечный канал — это сложная задача.
Поскольку у БИНС есть дрейф нуля и дрейф осей — вам все равно потребуется GPS для периодической перекалибровки. Для БИНС ценой в 4 тысячи долларов нужна перекалибровка раз в 15 минут. Для совсем дешевых — раз в 1-2 секунды,
Поскольку БИНС разместить в произвольном месте не удастся, то непонятно, откуда у вас фантазии о размещении антенны GPS В произвольном месте? Так что её можно ставить по центру машины.
Базовые станции сотовой сети — иногда передвигают. Или репитеры ставят. и пока это изменение дойдет до вашей сисиемы — сотни машин с курса собьются.
То, что вы не понимаете разницы между задачами это уже само собой. У нас есть разные задачи:
- удержание машины внутри полосы
- выяснение, по какой полосе едет машина
- определение координат машины, то есть навигация.
Так вот, удержание, разумеется проще сделать камерами, чем GPS. А вот остальные задачи…
Не видно с водительского места на садовом кольце разметку всех полос. Дай бог разметку соседней полосы увидеть. И камера на крыше не поможет, если рядом фура стоит. Это вам камеры надо метров на 10 поднимать, но увы — на этой высоте провода висят.
И по светофорам вы там не определитесь, их там много висит над разными полосами и они похожие.

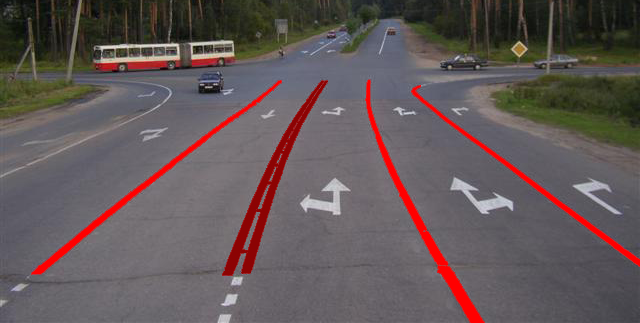
В правом нижнем углу — троллейбус и фура. Ну вот, находясь между ними, определите, на какой именно вы полосе.
Задача определения полосы, увы не решается предисторией. Полосы могут приходить и уходить и справа и слева. Иногда это происходит одновременно и вне светофоров. Например на питерской кольцевой. И ориентиров там нету…
Никогда не ездили по М10? Там в районе Валдая — трехполосная дорога. Причем центральная полоса — обгонная и используется то для одного, то для другого направления движения.

А я разве писал, что радаром можно определить номер полосы от края? Зачем вы все время за меня додумываете? Мне ваши мысли не нужны :) Радаром можно определить безопасную траекторию, если ориентироваться на серийные радары, выпускающиеся миллионный тиражами. У них достаточно скромные характеристики, и невысокая цена. Ваша ошибка, вы все время пытаетесь решить задачу одним каким-то методом, не предполагая совместного использования информации от разных систем. Предполагаете наличие какого-то супер-средства, которое решит все проблемы. И по-вашему, такое средство это спутниковое определение координат с сантиметровой точностью, которое позволит сделать и навигацию, и удержание в полосе, и все прочее. Не думаю, что это возможно, из-за меняющихся внешних условий и дороговизны.
Всё остальное вроде удержания в полосе — это ваши фантазии. Ровно так же как сантиметровая точность в городском каньоне. Речь шла о субметровой точности, то есть примерно полметра СКО. Разница в 50 раз — это вот разница между городской улицей и чистым полем.
Задача GNSS — это навигация. Включая определение номера полосы. Все остальное — делается иными средствами.
Комплексирование без повышение цены в разы — возможно лишь на диапазоне в несколько секунд.
Для простейщей задачи (определение железнодорожного пути при проезде туннеля) нам пришлось использовать БИНС ценой в 4 тысячи долларов. Все остальное — не дает нужной точности. на протяжении 15 минут.
При этом поезд на рельсах удерживается сам, конструкцией своих колес. И все равно, даже дорогая инерциалка — 15 минут максимум.
Так что давайте не спорить о вкусе устриц с теми, кто их ел… Дешевых и точных инерциалок — в ближайшие 20 лет не будет. Сам процесс интегрирования такой, чуть мелкая ошибка — и всё, показания поехали.
Но на интервале в пару секунд — использовать инерциалку стоит. Как часть сглаживающего фильтра для GNSS дешевые инерциалки подходят. Думаю, что через год мы такое решение покажем.
Насчёт железнодорожного пути я тоже в курсе, не далее как полгода назад ездили в Москву к железнодорожникам, предлагали им нашу БИНС, но она их не устроила по причине цены, которая заметно больше 4000 долларов. Не о таких БИНС речь. Давайте подитожим нашу беседу, я уже узнал о себе много нового и интересного, мне пока достаточно :) Итак, вы утверждаете, что для определения номера полосы необходима субметровая точность, которая не достижима обычным, массовым и дешёвым GPS. Я сослался на системы автоматического вождения, которые очевидно как-то определяют номер полосы, иначе, они нарушали бы ПДД, и при этом так же очевидно, не используют GPS с субметровой точностью, хотя бы потому, что ни на каких гуглкартах разметку не видно, и неизвестно, откуда бы они могли взять карты городской разметки. Вы заявили, что таких систем нет и долго ещё не будет. Ссылки на описания коммерческого использование подобных систем вы смотреть не захотели. Мои версии, как бы это могло быть реализовано, отвергли. Ну что же, не вижу смысла навязывать вам свое видение вопроса. Было интересно пообщаться. Желаю удачи в революционных начинаниях :)
Мой вам совет — поездите с навигатором. И вы вполне услышите советы занять ту или иную полосу. Причем эти советы не идут на однополосных дорогах. И на многополосных — не всегда, а только когда автоматически полоса не определилась.
Нынешний подход по определению полосы — это усреднение данных за минуты + куча эвристик. Да, сейчас у массовых навигаторов СКО 4 метра и определение полосы работает ненадежно. Но примерно в 30-50% случаев работает. Как пример — определение полос в навигаторе ПроГород.
В автовождении используются субметровая (или даже сантиметровая) точность. Просто приемники там сильно дороже. Как пример — промышленная система автовождения тракторов Ag Leader — точность вплоть до сантиметровой. Поскольку трактора ездят не по дорогам (и при этом ПДД не подчиняются), системы автовождения для них — это вполне зрелая коммерческая технология.
Революция не в том, что появилась субметровая точность. Она в том, что скоро субметровая точность станет дешевой. При цене системы автовождения в сто тысяч долларов пара тысяч за двухчастотник не важна. При цене навигатора меньше 100 долларов — уже существенна.

Вот с таких вот карт и рисуются карты для навигаторов.
Для определения положения навигатора в машине статистики 5 минут хватит. Сбой сразу после переноса навигатора с левого на правый край кабины возможен. Но это временный сбой.
По секрету. Навигаторы уже сейчас, при точности 3 метра КВО-50, определяют полосу. Только далеко не всегда верно, ошибка примерно в 50 процентах. Но рекомендация сменить полосу дается далеко не всегда. А лишь когда навигатор считает, что вы едете не по той полосе.
Это вот эвристики + статистика. И с увеличением точности -они будут лишь лучше работать Меньше будет ложных рекомендаций сменить полосу.
Простой случай — антенна GPS посредине машин машины. ширина машины 2 метра ширина полосы 2.75 метра. До центра своей полосы будет 2.75/2 -2/2 = 37.5 см. До центра соседней полосы будет 2.75/2 + 2/2 = 2.37 метра.
Координат полосы мы получаем от пробочного сервиса. Грубо говоря, машины шлют свои координаты на сервер, он вычисляет загруженность дороги и наличие пробок. Ничего не мешает этому же серверу определять и средние координаты по полосе.
Если у нас антенна на краю машины — то это тоже выясняется осреднением. Ну не будете вы долго ехать не в потоке. А в потоке — уже видно, что для конкретной машины с среднем есть смещение. Определяем положение антенны относительно оси машины и учитываем его дальше.
Проблемы будут лишь в первые минут после перестановки антенны с левого крыла на правое.
Двухчастотник + эфемериды в SP3 + GALILEO. Просто дорого пока что…
Кажется, это самое интересное утверждение в этом топике! Есть ли реальный опыт или статьи? Какой можно достичь % fixed решения при поездках по Москве в такой конфигурации?
Моё мнение, что при нынешней структуре сигналов стабильных фазовых измерений достичь не получится из-за многолучевости.
Вот, например, картинка кодового решения Геоса в городских условиях, если отключить всю магию по отбраковке и сглаживанию измерений:

Я боюсь представить, что там с фазовыми измерениями. Неужто реально тащить фазу без разрывов в таких условиях?
У GEOS слипов очень много. В том числе — полно и полуцикловых слипов. Но фаза у него зато чистая, шум порядка 1%.
По Питеру NV08 в режиме компаса (3 антенны на крыше) дает порядка 55% fixed. GEOS — думаю где-то 75% (больших трасс не делали). Вся фишка в том, что на GEOS быстрее восстанавливается решение.
Самое неприятное — это узкая улица с девятиэтажками. Если в створе спутников мало — пока с этого каньона не уйдем, фиксации не будет.
А зачем для определения полосы нужен fixed? Вполне хватит float. собственно он и имелся ввиду.
Разве float не имеет права оказаться на соседней полосе?
По Питеру NV08 в режиме компаса (3 антенны на крыше) дает порядка 55% fixed. GEOS — думаю где-то 75% (больших трасс не делали). Вся фишка в том, что на GEOS быстрее восстанавливается решение.
Самое неприятное — это узкая улица с девятиэтажками. Если в створе спутников мало — пока с этого каньона не уйдем, фиксации не будет.
Спасибо, это очень ценная информация! Я докторскую пишу на тему решения проблемы многолучевости в корне на системном уровне, и надежный RTK в городе в этом случае — одно из основных преимуществ.
У GEOS слипов очень много. В том числе — полно и полуцикловых слипов. Но фаза у него зато чистая, шум порядка 1%.
Все признаки того, что они перетянули полосу и не успевают её расширить при появлении динамики. Шумы маленькие, но саму фазу там должно систематически валять.
Если Татьяна Юрьевна разрешит — могу дать данные проездов. Но это проще в личке обсуждать. В свою очередь — нам интересны любые решения по поводу многолучевости.
Да, это даже мне понятно, что у GEOS кольцо слежения слишком затянуто. Точнее на динамике — успевают, а на многолучевости — нет. Если бы они обнаруживали все слипы — было бы нормально.
Вот такая штука. Пока в стремной коробке, но если положить ее в пакет, то можно прилепить даже на крышу авто и сделать запись в движении даже в мокрую погоду.

Оборудование для проверки идеи есть. И антенны, и фронтенды, и цифровая часть. Но там всё не просто, раньше сентября результатов не будет.
ровно то же, что и команда Swift'а в штатах в техническом плане. Тот же Zynq,
те же фазовые измерения. Вот только потребитель у нас совершенно другой.
Когда несколько лет назад начали появляться новости о Swift, мы только
смеялись. Приемник на FPGA для беспилотников? Что правда?! Потребеление в 3 Вт,
цена порядка $1000. Кому такое решение нужно!? Есть ведь u-blox, есть Геос и
NV-08C.
Жизнь показала, что нужно! Нужно именно законченное решение, которое работает
из коробки. В итоге наш поезд ушел, а Свифты в топе.
За это время они переориентировались на другую нишу — automotive. В этой нише
их недостатки нивелировались, а плюсы выросли. И сила их не в технике (судя по
исходникам, работать в реальных условиях оно будет кое как), а в том, что это
полноценная компания, предлагающая законченное решение и готовая развиваться
дальше!
Вы скажете, что $600 — слишком много для automotive. Но у этих ребят уже $15млн
инвестиций. Когда дойдут до следующего уровня развития и расширят рынок, то
выпустят ASIC, Опустят стоимость до $100.
- На RTKLib можно собрать демонстрашку. В чистом поле она даже будет работать. В реальных условиях — будет работать плохо. Слишком многое приходится подтачивать под особенности конкретного приемника.
- Двухчастотные системы работают до дальности в 500 км, одночастотные до 10-20 км.
- Точность 1 метр — это СКО (или КВО-50%). Максимальная ошибка — плюс-минус три сигмы, то есть 3 метра. Этого мало для автоматической посадки и в большой и в малой авиации. Представьте себе, вы летите на самолете и на высоте 3 метра выключаются двигатели. Ну как, приятно полетали? Ещё смешнее, если самолет думает, что она высоте трех метров, а тут «привет, Земля». Ну в общем стойки шасси вряд-ли такое выдержат.
- С чего вы взяли, что трехчастотные системы сильно лучше двухчастотных? Очень прошу объяснений.
- Задержки в передаче RTK поправок могут достигать 5 секунд, Если передавать измерений (а не поправки), то до 1 секунды. 0.1 секунды просто никому не нужно.
- В мобильной технике никогда не будет приемников, способных работать в режиме RTK. Просто потому, что антенна, которую можно всадить в мобильник, не даст нужной стабильности фазового центра. Почему именно так — это вам @ itsar, как разработчик хороших антенн, может подробно рассказать.
Теперь объясняю суть революции. У нас есть много разных ошибок, которые мешают достигнуть сантиметровой точности. В первую очередь это ошибка бортовых эфемерид. Она устраняется при помощи PPP (в русском варианте СВО ЭВИ), то есть передачи высокоточных эфемерид (и ошибок часов спутников) через инет в формате SP3. В том числе и прогноза эфемерид до 48 часов. Уже на базе этого в экспериментальном режиме было достигнуто фиксированное решение RTK (сантиметровая точность в динамике) на одном приемнике в одночастотном режиме.
Следующая проблема — это ионосфера. Она неоднородна, для её коррекции действительно нужна густая сеть базовых станций. Но эта проблема решается двухчастотным приемником. А самое главное — дешевым двухчастотным приемником.
Все остальное — или зависит от самого приемника или достаточно однородно, чтобы иметь небольшую сеть коррекции.
Если интересно — то думаю, что через полгода мы вам покажем RTK на одном приемнике производства НИИ КП
Кстати, на счёт RTK и одночастотников — тайваньцы выпустили модуль, в котором приёмник и ARM кристалл для вычислений, $50 за 1Hz версию, $100 за 10Hz: http://navspark.mybigcommerce.com/ns-hp-rtk-capable-gps-gnss-receiver/
Если не RTK — ищите сами. Для RTK нужен малы размер фазового центра, а это означает дорогую антенну.
ARM для вычислений есть в любом приемнике, основной вопрос в прошивке… :-) Ну и размерах ПЗУ/ОЗУ, чтобы прошивку запихать…
Конкретно этот чип для России не годится — там нету ГЛОНАСС. Совсем, как класса. Вместо него — Beidou.
Глонасс нужен в основном, чтобы не иметь проблем с регулирующими органами. Остальное зависит от близости к Китаю. Если это забайкалье — так Beidou скорее всего сильно лучше ГЛОНАСС.
По антеннам — обращайтесь.
Обращаться к вам готов, но точно не за кастомной разработкой — это же хобби для меня, совсем много денег вбрасывать (возможно, пока?) не готов.
Если Вы про такую штуку — https://lirias.kuleuven.be/bitstream/123456789/286189/1/04459030.pdf, то она не особо дешевая вещь. Может, если ее сделать на текстолите будет и дешево, но потери могут быть большие.
Будет время, прикину такую антенну в HFSS. Спасибо!
Так что, прошу прощения, я передумал. Такую антенну моделировать не хочу.
Могу сделать на воздушном резонаторе то же самое, когда руки дойдут.
- Доступность — это бесплатность софта? Тогда ничего.
- RTK на 500 км по часовой записи — да, показать можем, если они реально двухчастотные. Присылайте 1-3 часа записи в формате RINEX 2.12
- Вы будете ржать, в указанном вами документе нету такого требования. Там есть предел для признания GNSS непригодным — но это 40 метров по горизонтали по cat 1. Похоже, что вы спутали документы. hb100 — это охранный детектор движения, точность определения дальности там просто не регламентирована. Все, что он может сказать — это приближается земля или нет.
- Сигнал GPS L2 — закрытый, большинство приемников его не принимают. Открытый сигнал L2C излучает лишь половина спутников. Отсюда и получается, что либо ждать, пока все спутники будут излучать L2C, либо ждать, пока они все будут излучать L5. Судя по вики 19 спутников излучают L2C и всего 12 — L5.
- Пока задержка меньше времени между решениями — деградации нет. То есть 0.1 сек — нужно лишь для решения на 10 герц. Но 10герцевое решения само по себе в 3 раза хуже по точности, чем решение с частотой 1 герц. А дальше деградация зависит от схемы. При нашей схеме (передача измерений) — мы или вообще не синхронизируемся — или выдаем решения с задержкой. О плавной деградации можно говорить лишь при передаче поправок, а не измерений. Но это уже не ко мне.
- Вообще конкретные цены лучше бы обсуждать в личке. Особенно то, что касается ещё не выпущенных на рынок продуктов (как наших, так и смежников). У нас пока до 500 км работает статика. Какая точность вам нужна? Какое время фиксации для RTK? В какой стране (Россия или нет)? Те же талисмановские антенны при импорте в РФ дорожают почти в два раза.
- Не прочлось. Если можно — одним куском (или нарезка не меньше часа) и RINEX 2.10. И только L1 и L2, Мне для эксперимента не хочется адаптировать программу под ваш вариант RINEX (для продажи — само собой, адаптируем).
- Глянул в ICAO Annex 10, vol.I, угу там есть таблица 3.7.2.4-1. Наилучшая точность для посадки 16 метров по горизонтали, 4 по вертикали (КВО95). Это уже реализуемо на одночастотнике с DGNSS. Требования для полета там смешные — 2 мили.
- L2W — не для российских приемников. Это военный сигнал США.
- Что за задача в которой 1 герц не хватает? Вы понимаете, что вообще-то решение поступает с приличной задержкой (у нас в RTK — до 0.7 секунды). Если нужна нулевая задержка — есть смысл брать данные с инерциалки и ежесекундно корректировать её с помощью GNSS.
- Стабильная сантиметровая точность на 1 приемнике? Попробуем, может к зиме и будет.Пока сложно сказать, только приступаем.
Если не трудно — опишите задачу. Пока просто не понимаю, что вам надо. Пиара нету, дешевый RTK c СКО 5 миллиметров можем показать. Но это одночастотники и в городском каньоне все сильно нестабильно. А что в ближайших планах — не очень можно описывать публично.
В мобильной технике никогда не будет приемников, способных работать в режиме RTK. Просто потому, что антенна, которую можно всадить в мобильник, не даст нужной стабильности фазового центра. Почему именно так — это вам @ itsar, как разработчик хороших антенн, может подробно рассказать.
Кстати, я сейчас как раз работаю над тем, как обмануть природу в этом случае. Через пару месяце надеюсь что-то показать.
Да и вещь будет довольно специфическая.
PS. Когда заходит речь про RTK через мобильный телефон, обычно даю ссылку на ИОНовскую статью: Kenneth M. Pesyna, Jr., Robert W. Heath, Jr., and Todd E. Humphreys. Centimeter Positioning with a Smartphone-Quality GNSS Antenna
У них есть пара интересных выводов о других частях нашей дискуссии.
1. Они утверждают, что добавление спутников с плохим ОСШ в любом случае ускоряет сходимость.
2. Сходимость ускоряется также и при движении мобильного устройства.
Что особенно важно — статья дает надежду на реализацию высокоточных режимов в мобильных устройства. Спасибо, уважаемый Korogodin!
Подскажите, пожалуйста.
Опять февраль семнадцатого, готовим революционный наган для спутниковой навигации