Comments 161
99,9% случаев таких ДТП происходит от проблемы, к которой у робомобилей есть иммунитет – а именно, слишком большая скорость езды
Интересно, имунитет обусловлен просто строгому соблюдению скорости на знаках или более точному определению допустимой скорости в текущих условиях.
Если первое, то ни о каком имунитете речь не идет, если только скорость на самих знаках не будет адаптивной и определяться каким-то умным алгоритмом на основе текущих условий, а не просто людьми-чиновниками с крайне нестабильным качеством принятия таких решений и черепашей скоростью обновления значений.
Если второе, то вопрос, за счет чего именно будет достигаться эта более высокая, чем у человека, точность. Конечно, можно исключить эмоциональный фактур, но он нивелируется общей тупостью текущего ИИ по сравнению с интеллектом человека.
Или скажем человек пока до машины шел — три раза чуть не упал по дороге! Он прекрасно понимает, что на дороге каток и никакого сцепления в принципе нет. Он даже в первый раз тронется на машине совсем по другому! Робомобиль в этой ситуации попытается «просто поехать» — выроет себе яму колесами во льду и так в этой яме и останется.
По поводу "типизны" робомобилей, приувеличиваете. Просто современная машина без всяких автопилотов не выроет яму на льду, так как сработает антипробуксовочная система. По поводу скользкой дороги, прекрасно срабатывают датчики курсовой устойчивости.
Но в целом конечно, да, опыт водителя это много значит.
А вообще, первыми потребителями автопилотов всё таки будут люди, у которых автомобили в гаражах стоят и стартануть проблем точно не возникнет. А уж обледенение дороги не должно будет сложно определить.
А при одинаковых гражданских условиях кожаный водитель имхо в сухую сольет технике ибо моментальные реакции, весь объем информации десятки раз в секунду, векторизация момента, имитации блокировок это не про людей.
Мешок с костями сбросит скорость до нуля до тех пор пока неадекватное ТС и все возможные контактеры не примут скорость при которой их поведение будет полностью прогнозируемым для маневров. Робомобиль будет как не в чем не бывало ехать, пока его сбоку как кеглю не подобьют.
В реальном мире робомобили будут ездить с ДВОЙНОЙ дистанцией до впереди идущей машины и контролировать лишь то что перед ними и справа-слева от них — при этом мешки с костями будут лезть в любую дыру и в пробках устраивать цирк тормозя ряды с робомобилями в ноль…
Во всяком случае, так это я себе представляю — и так это описывается обычно.
И да, кожаным мешкам не будет зазора для шашечек. Хотя, скорее всего, робомобили будут уступать им место, так что шашечки всё равно будут возможны. Но тут достаточно просто лечится штрафами — данные-то с робомобилей доступны, можно даже передавать их в ГИБДД/etc прямо риалтайм в случае нарушений.
лепота!
Современные системы не умеют например гарантированно отличать реальное зажигание обычных стоп сигналов от бликов солнца на них же — т.е. даже на это реагировать проблема! Поэтому и ориентируются исключительно на дистанцию. Дистанцию они могут и ультразвуковыми методами и радарами с ФАР видеть. Но это дистанция лишь до впереди идущей машины — а мешок с костями может контролировать сразу несколько рядов на несколько машин вперед… По мельчайшим признакам движения вычислять неадекватов и просто тех кто «в телефон затупил» и повышать приоритет анализа действий в их направлениях…
За счёт моментальных реакций автопилота можно имитировать жёсткую сцепку авто, по сути. То есть при замедлении или ускорении изменения дистанции почти не происходит.
И что это за идиотская ситуация "Вы едете по трассе — через 4 машины впереди видите что из вашего ряда резко уходит направо автомобиль с заблокированными задними колесами и дымом из под них — в правом ряду фура которая по касательной отбивает его снова в ваш ряд!"?
Как она может произойти в случае, если автомобилем управляет робот?
Кстати насчет моментальной реакции. Пусть используем ультразвуковой радар. На скорости 90 км час тормозной путь 52 метра по сухому асфальту. Пусть мы приняли эту дистанцию за ту, которую мы будем поддерживать.
Тогда один импульс измерения занимает время (52/330)*2 — 0.3 сек. Для оценки измерения расстояния нужно минимум два импульса итого 0.6 сек. Плюс нужен какой-то интервал между импульсами, от него будет зависеть расстояние, на которое будет видеть наш радар. Пусть максимальное измеряемое расстояние будет 100 метров. Это еще 0.6 секунды. Плюс, если в принятии решения задействован компьютер и ПО, это тоже даст задержку, но ей давайте пренебрежем.
Ну в общем очень грубо минимальное время реакции 1 секунда. На практике понадобиться надежно оценить изменение скорости впереди идущего автомобиля, это значит несколько импульсов, т.е. минимум 2-3 секунды. И это еще очень оптимистическая оценка.
Т.е. ни о какой «мгновенной» реакции при ультразвуковом локаторе речи быть не может.
И это мы еще не затронули время обработки в компе.
Расчет для ультразвука просто потому, что кто-то в обсуждении упомянул ультразвук. Я пытался показать, что «мгновенной» реакцию датчиков можно считать только пока не касаешься технических деталей.
ДЛя лидара задержки будет вносить время сканирования навскидку.
Добавил:
Вот нашел какой-то лидар для автомобилей роботов. Подробных параметров нет, но как я понял выдает облако точек/картинку с частотой 25 Гц.
XenoLidar Highway Metrics
Long range detection: up to 200m
Data output rate: 25 H
Field-of-view: 30° x 10°
Laser classification: Class 1
Resolution: 0,2°
Но, как я понимаю, нужно еще найти объекты в этом облаке. Ну и проанализровать разницу нескольких кадров и высчитать препятствия и/или изменения скорости.
За счёт моментальных реакций автопилота можно имитировать жёсткую сцепку авто,
Да про какую моментальную реакцию вы все время фантазируете? Реакция робота — это уровень круиза КОГДА МАШИНА ТОРМОЗИТ! Реакция человека — зажигание стопсигналов когда только педаль тормоза потрогали и колодки не прижаты… Человек всегда имеет реакцию быстрее круиза если не пьян или не под наркотиками. И дистанции даже полные чайники с рассадой держат меньшие чем в круизах в прицнипе возможно задать…
А на 4 машины вперёд данные будут от 3й машины, которая будет смотреть не на дым, а на начавшееся скольжение вбок, и реагировать — торможением.
Не своим лидаром смотреть, а получать данные от той машины, что впереди. В этом-то и профит.
Серьезно — сделать фединг-устойчивую скоростную mesh сеть между набором движущихся с разными скоростями в пространстве машин, хотя бы где каждая просто будет точно знать свое, и ближайших соседей пространственное положение и скорость (в условиях jaminga GPS-Глонас само собой тоже!) — это задача сильно так посложнее чем автопилот…
Не думаю, что это сложнее надёжного автопилота. просто автопилоты уже делают, а над этой задачей не особо задумываются, не актуально ещё
а над этой задачей не особо задумываются, не актуально ещёКак бы… нет. Задумываются. Компания Tesla запатентовала технологию для позиционирования транспортных средств.
Мешок с костями сбросит скорость до нуля до тех пор пока неадекватное ТС и все возможные контактеры не примут скорость при которой их поведение будет полностью прогнозируемым для маневров.
Или что более вероятно мешок с костями с физиологическим лагом в секунду шарахнется в сторону, напугав соседей по потоку и собрав завал из таких же в теории ко всему «готовых» прогнозистов.
Обычный гражданский водитель не имеет навыков далекого прогнозирования, и уж тем более в случае препятствия не выполнит лосиный тест без esp. Контроль на 4 машины вперед это фантастика, никто так не ездит в привычных условиях каждый день. У большинства точно такое же поле внимания в 1 ну край 2 машины и даже не вокруг, а градусов на 180 перед собой. Эт мы еще не берем в расчет тот момент, что водитель от управления тс постоянно отвлекается. Можно долго натягивать сову на глобус, но факт в том что 4 из 5 аварий происходит из-за ошибок людей в управлении тс.
Да и вообще о чем разговаривать, если в полно видео где автопилот в тесле пытаются машину в разделительный бордюр загнать. Это уровень какой то демоверсии совсем… Демонстратора принципа… И этот уровень 5 лет как никуда особо не движется…
Как мне нравятся эти байки про суперменов, которые видят через три ряда и предвидят все на неделю вперед. Только почему-то в реальности мне встречались только те, кто умудряется в кювет вылететь на чуть мокрой трассе и бампер помять в пробке.
так как сработает антипробуксовочная система
За 6 зим на машине с антипробуксовочной системой еще ни одна не обошлась без полного отключения антипробуксовочной системы, системы стабилизации и всего этого, чтобы просто выехать со стоянки. Но да, отягчающее обстоятельство в виде заднего монопривода — присутствует. На переднем приводе выезжать сильно легче. Но антипробуксовки знакомым тоже время от времени приходится выключать.
прекрасно срабатывают датчики курсовой устойчивости.
Если водитель знает, как они работают, в каких условиях, как себя вести в случае чего. Опять же, знаком с людьми, которые оказались в кювете из-за того, что сработала система стабилизации, а они, вместо нажатия на газ, начали тормозить. А нужно понимать, что система стабилизации, если уж она включилась в дело, сама затормозит какие надо колеса. А вот если просто давить тормоз — то она просто как любая машина на заблокированных колесах улетит по прямой.
Ни разу не приходилось отключать, даже наоборот — без неё не выехать из грязи и при диагональном вывешивании (имитация блокировок). Хотя, периодически читаю что её надо отключать, иначе не выехать, видимо, производители настраивают её на дорожные условия типа неожиданного льда под колёсами.
> а они, вместо нажатия на газ, начали тормозить
Без ESP они оказывались там же на ПП, а в случае ABS оказывались в жопе впереди едёщей машины, поскольку отпускали тормоз. Просто надо знать используемое оборудование или доверить управление профессионалу (роботу).
> то она просто как любая машина на заблокированных колесах улетит по прямой.
ABS? Ни разу не видел машину с ESP, но без ABS — она стало обязательной сильно раньше и дешевле. Другое дело если ESP включилась поздно и машина уже потеряла сцепление, то тут что торможение, что ничегонеделание, что газ на классическом приводе без грамотной рулёжки приведут к одному результату.
evgenyk
> Нам нужно измерять расстояния или ехать?
Нужно определять расстояние и скорость, чтобы ехать, а устройство делает это быстрее и точнее (траектория — это частое измерение расстояния и скорости), не тратя на это много энергии (специализация). Велосипед — дополнительное усложнение с балансировкой, у роботов же осоновная проблема — хаос, создаваемый живыми водителями, в основном теми, кому «мне же надо», знаки, закрытые ветвями, грязью и снегом(он будет полностью проигнорирован, хотя человек может догадаться что там что-то есть) и места, где обочина выглядит лучше, чем дорога (но на них разработчики автопилота пока не замахиваются).
Между этими задачами стоит целая пропасть. Вот эти ваши «аназилировать состояние дороги и поведение других участников движения» просто только написать. Современный ИИ не так чтобы хорошо умеет решать подобные задачи.
анализ состояния дороги не требует ИИ, скользкая дорога или нет оценивать можно как и человек это делает по поведению машины
Полагаю, нет смысла продолжать.
но я готов к новым знаниям теоритическим или практическим
Я не знаю, какой у вас опыт и что вы считаете ИИ, а что чем-то иным, но, судя по всему, немного другое чем я. И нам будет сложно говорить на одном языке.
там вообще не нужно интелекта чтоб понять когда скользко
Это вам не нужно интеллекта. Не знаю почему. Всем остальным знакомым гонщикам — интеллект очень помогает. Если не скользко — можно идеально пройти поворот «вташниванием» не потеряв скорости. Если скользко — то сильно заранее поставить машину боком и вытянуть тягой. И вот отличить в каком повороте нужно вташнивать, а какой нужно проходить боком — нужно задолго до того, как начали проскальзывать колеса. Еще первый гонщик, который на Ауди Кваттро гонял ралли, говорил (цитирую по памяти интервью с гонщиком, которое я смотрел лет пять назад): «на переднем или заднем приводе можно ездить „на рефлексах“ и реакции на изменения поведения автомобиля. На полном приводе — это не проходит и ты улетаешь в кювет на первом же повороте.»
Роботу не нужно быть умнее всех. Что бы не попадать в аварии, ему достаточно быть умнее пьяных, идиотов и тех, кто купил права. А это уже, фактически, достигнуто.
Большую часть времени, конечно, и человек ездит используя примерно тот же уровень принятия решений (условные рефлексы и мышечную память), эдакий встроенный круиз-контроль, когда все привычно и просто. Но периодически подключается и основное сознание, иначе бы ездить никто не смог.
А до уровня человека, который смог купить права, ИИ еще бесконечно далеко не смотря на все успехи в Го и подобных задачах.
ему достаточно быть умнее пьяных
Ну… например… если специально этому учиться, можно в абсолютно нетрезвом состоянии водить лучше большинства «трезвых». Очень полезный навык для сотрудников спецслужб и дип-представительств.
идиотов
Тут никакой интеллект не поможет. Когда идиот из крайнего правого ряда на трехполосной дороге решает развернуться — это никакой ИИ и ни один опытный водитель не увернется. Мне так правый бок машины пропарывали раза три или четыре. Еду, никого не трогаю, не превышаю скорость, держу дистанцию, все дела. Бам! «ой, а мне развернуться надо было...» А заранее перестроиться в крайний левый ряд, посмотреть по зеркалам, все такое? «А я тут всегда так разворачиваюсь...» Что интересно, все были мужиками…
тех, кто купил права
Во второй половине 90-х был период, когда был выбор: пересдавать экзамен на права 10 раз, или сразу занести денег и получить права без экзамена. Угадайте с трех раз, какой вариант выбирало большинство. Не потому, что водить не умели. Просто сдать экзамен не скинувшись всей остальной автошколой на «сдачу экзамена» — было невозможно. Только где-то в самом начале 2000-х что-то поменялось и появился шанс сдать экзамен без заноса денег, если идеально все сделать.
А это уже, фактически, достигнуто.
Вы про тот случай, когда робот заехал под разворачивающуюся фуру два года назад, или про тот случай, когда робот заехал под разворачивающуюся фуру уже вот, вроде, в этом году?
Или все же про тот случай, когда робот в Германии вышиб с автобана туристический автобус? (к счастью, никто не погиб...)
Я имел ввиду 5% тех, кто водит плохо и постоянно создаёт аварийные ситуации. Конечно, сотрудники спецслужб могут быть обучены водить пьяными, а кого-то принудили дать взятку за права, но они в эти 5% не входят.
Эти роботы, которых вы упомянули, всё же наматывают миллионы километров (у Waymo, по крайней мере). И они уже тоже не входят в эти 5%. Разовые аварии точно будут, к сожалению, но если в расчете на миллион километров аварий у них меньше, значит на дороги можно выпускать. Может пока в нормальных условиях, на хороших дорогах, но уже можно.
С прогнозом, что полностью автономная Тесла в этом году не будет, я согласен, но через пару лет — точно. Опять же, она может будет отказываться ехать в метель, но 95% обычных поездок она сможет покрыть.
Эти роботы, которых вы упомянули, всё же наматывают миллионы километров
Waymo — вообще плохой пример. Их полицейский как-то раз даже оштрафовал за то, что едут слишком медленно и создают помехи другим водителям.
А другие роботы — попадают в опасные ДТП ничуть не реже «мясных» водителей. Просто почитайте статью, которая тут же на хабре недавно была, про NHTSA и частоту аварий Тесл с автопилотом… Без грубых подтасовок — частота аварий с автопилотом примерно та же, что и у всех остальных автомобилей без автопилота.
частота аварий с автопилотом примерно та же, что и у всех остальных
Ну и хорошо. До среднего уровня добрались, разве нет?
едут слишком медленно и создают помехи другим водителям
Это другие едут слишком быстро. Некоторые вообще митингуют за то, что б ограничить в городах скорость до 30 км.
Короче, штраф за скорость — не опровержение. Они едут медленно наверняка для безопасности. Вряд ли у них такой софт тормозной и не оптимизируется. В крайнем случае лишнюю видеокарту поставят, когда начнут продавать.
Некоторые вообще митингуют за то, что б ограничить в городах скорость до 30 км.
А некоторые приводят вполне научно аргументированные доводы, что ограничение скорости — зло и глупость. Почитайте, например, здесь же, статью про «любое ограничение скорости слишком мало» или что-то типа того. Поленюсь в пол одиннадцатого сам искать сслку на статью.
И да, слишком медленный автомобиль в потоке — часто бывает страшнее, чем слишком быстрый. Я сам три раза памперсы поменял, пока доехал по МКАДу от Рублевки до Ленинградки с водителем, который ехал 70 км/ч. Это реально страшно!!!
Можно, конечно, попробовать ограничить скорость везде и всегда 5 км/ч. Но как быть с бегунами и велосипедистами? И да, за свою жизнь я видел людей со сломанными руками-ногами после столкновения двух пешеходов неспеша идущих со скоростью менее 5 км/ч. Кто-то из моих знакомых вообще ногу сломал вставая с кровати. Запретить теперь хомо-сапиенсам вставать с кровати?
Во второй половине 90-х был период, когда был выбор: пересдавать экзамен на права 10 раз, или сразу занести денег и получить права без экзамена. Угадайте с трех раз, какой вариант выбирало большинство. Не потому, что водить не умели. Просто сдать экзамен не скинувшись всей остальной автошколой на «сдачу экзамена» — было невозможно. Только где-то в самом начале 2000-х что-то поменялось и появился шанс сдать экзамен без заноса денег, если идеально все сделать.
Сдавал в 1998 на права в Москве. Не скидывался и не заносил, другие выпускники курсов тоже не заносили, кроме тех, кто несколько раз срезался на экзаменах. Насколько знаю, много хуже было в 2005-2008 — тогда несколько друзей сдавало и с них собирали уже в обязательном порядке.
они ехали бы в одном метре друг от друга, экономя при этом топливо из-за пониженного сопротивления воздуха.
Я часто встречаю такое утверждение. И у меня всегда возникает один и тот же вопрос. Давно существуют такие вещи, как железная дорога и метро. В некоторых даже есть полностью автоматические ветки. Там условия абсолютно тепличные по сравнению с автомобилем.
Но нигде-нигде поезда не едут с расстоянием 1 метр между составами. Почему?
Я лично думаю, что когда (если) робомбили будут ездить по дорогам, они будут выдерживать дистанцию не меньше, а больше, чем сегодня живые аводители. Просто из-за того, что буту соблюдать базовые требования безозпасности.
Допустим робомобиль уверен, что у него тормоза лучше чем у впереди двигающегося робомобиля.
Потом эти робомобили проезжают по лужам.
Потом первый робомобиль тормозит, мокрые колодки сперва тупят, потом резко схватывают.
Следом в метре второй робомобиль тормозит, но его мокрые колодки тоже тупят и он въезжает в зад.
А потом еще добавляется паровозик до той самой лужи.
Вы «на глаз» хорошо можете определить скорость/расстояние стоя или в движении?
Очень хорошо. Я езжу на работу на велосипеде по Лондону. Компьютеров способных на это пока что нет и близко.
даже на сегодня, мощностей достаточно для многозадачности и многопоточности
Только мы не умеем программировать тольком многозадачность. Ну или нейронные сети. Но мы не умеем их эффективно обучать.
Ну и мощности и энергоэффективность пока несравнимы.
Очень хорошо. Я езжу на работу на велосипеде по Лондону. Компьютеров способных на это пока что нет и близко.Как бы, это чудесно, что у вас такой глазомер, но у большинства — нет. А в потоке автомобилей даже 1 товарищ может создать много проблем.
Но мы не умеем их эффективно обучать.Сколько времени занимаются этим вопросом? Того же человек ранее 16-ти лет не пускают за руль. То есть. Нужно же понимать, что у человека преимущества за счет того, что он 16 лет эффективно обучается всему, по сравнению с автопилотом. Да, много нужно учитывать, однако же — вождение автомобиля — это узкие знания и навыки, осталось понять что нужно и что нет и много «пилить». При определенном желании, я не вижу проблем в том, чтобы не сделать автопилот лучше человека.
Ну и мощности и энергоэффективность пока несравнимы.Проблема в том, что человек осознано или непреднамеренно нарушает ПДД, несмотря на высокий КПД мозга по энергоэффективности. Пьяные за рулем — четверть всех ДТП. Где же эта хваленная эффективность. Её нет, поэтому приходится внедрять компьютеры.
Для справки, скажите вычислительную мощность человеческого мозга.
Что бы мы могли сами поделить на мощность компьютера и убедиться, действительно ли на несколько порядков больше или вы просто приукрашиваете цифры.
Где-то так.
Хорошо, предположим. При этом в Nvidia Tesla V100 2*10^10 транзисторов. Конечно мы не можем напрямую сравнивать синапсы и транзисторы, но раз уж вы начали, я поддержу.
При таком подходе разница действительно три порядка. Однако есть три соображения.
- В компьютере Summit 27 тыс таких видеокарт. То есть уже два порядка в пользу компьютера.
- Частота нейронов — 2 Гц в среднем, у обезьян максимум 18, в зрительной коре. 9 порядков не в пользу людей.
- Человек не может думать 5 мыслей одновременно (пробуйте), вся "параллельность" — это одновременная работа нейронов. Однако в процессоре тоже не один транзистор одновременно работает. Никаких преимуществ человека тут не видно.
Вывод — по железу цель уже достигнута, прорыв не обязателен, нужны обучающие алгоритмы.
Во время обучения нарабатываются связи между нейронами. После обучения эти связи работают параллельно.
Иначе человек не то, что водить автомобиль, он ходить и даже ползать бы нормально не мог.
И параллельно работет не только сам мозг, датчики (нервы), скажем в глазу, тоже работают параллельно.
Я бы не сказал, что "немножечко путаю". Скорее предмет обсуждения не точен. Вы описали, что процесс вождения идёт в фоне (да, в процессе можно ещё разговаривать, например). Однако как вы из этого делаете вывод, что мозг эффективнее? (Если делаете). Фоновые задачи на компьютере точно так же возможны.
Я не провожу полную аналогию между компьютером и мозгом. Я лишь утверждаю, что тезис "человеческий мозг на порядки эффективнее" ничем не подвержден. На текущий момент, хороший водитель водит лучше робота, это верно. Но никакого универсального преимущества и мозга нет, это временно.
Сопоставимый компьютер — не знаю на сколько порядков больше.
Одна плата Nvidia Tesla V100 — 300 Вт
Сопоставимый по количеству транзисторов? 300 кВт получается (1000 тесл). 4 порядка. При этом частота выше на 9 порядков.
Но на самом деле потребление не существенно. Электричество стоит крайне мало по сравнению со стоимостью воспитания, содержания и обучения человека. Поэтому даже 300 кВт-ный мозг будет крайне выгоден экономически. Но не в машинах, конечно, там просто негде разместить столько железа, но на некоторых других операциях — вполне.
Однако, повторюсь, если учесть частоту, получается 5 порядков в пользу железа. Упирается всё скорее в алгоритмы, а не в транзисторы.
Нужно сравнивать не частоты, а время выполнения нужных задач. На сегодня компьютеры вообще не могут выполнять сравнимые задачи при вождении автомобиля, скажем вести машину, ориентируясь только на зрение, без разметки. Им нужны дополнительные данные.
мозг в основном работает параллельно
Вы это говорите уже не первый раз, но что вы имеете ввиду? Фоновые процессы? Сердцебиение, дыхание, пищеварение? В компьютере они тоже есть.
С другой стороны, вы можете решать два математических примера одновременно? Вряд ли.
Дайте, пожалуйста, более ясное подтверждение, что мозг более параллелен, чем компьютер. Практика показывает, что наоборот, человек без специальной тренировки даже двумя руками управлять раздельно не может. Компьютер может.
время выполнения нужных задач
Какой тезис вы пытаетесь защитить? Время выполнения почти всех задач у человека намного больше. Если брать только те задачи, которые компьютер тоже может выполнить. Вы же не будете всерьез утверждать, что человек быстрее?
> мозг в основном работает параллельно
Вы это говорите уже не первый раз, но что вы имеете ввиду? Фоновые процессы? Сердцебиение, дыхание, пищеварение? В компьютере они тоже есть.
Я имею в виду то, как работает мозг.
Возьмем например зрение:
К каждому чуствительному элементу (палочки и колбочки), подключен нейрон. Этих желментов примерно 126*10^6 в каждом глазу.
Информация от каждого элемента передается в мозг одновременно. Так же одновременно обрабатывается информация в слоях нейронной сети мозга компьютеров. Таким образом, количество последовательных моментов времени равно количеству слоев нейронной сети мозга. Это десятки-сотни ИМХО.
В компьютерном зрении датчик это обычная видеокамера. В один момент времени передается информация об одном пикселе. Количество последовательных моментов времени только на одном элементе обработки изображения равно количеству передаваемых пикселей. И только в некоторых местах мы научились обрабатывать информацию более-менее параллельно, при перемножении матриц нейронной сети на видеоускорителях.
Разница по количеству тактов между компьютером и мозгом я думаю в десятки сотни порядков.
Например пусть обрабатывается одинаковое количество пикселей, равное количеству элементов глаза. На одном слое нейронной сети (а в глазу ИМХО она начинается прямо в глазу) у глаза будет 1 такт, в аналогичном месте у компьютера (на выходе видеокамеры) будет 126*10^6 тактов.
По моему так.
Даже банальная передача сырых данных — ничто не мешает читать параллельно с разных частей марицы, а не всю матрицу последовательно по одному шлейфу.
Про вычисления — последовательное вычисление наиболее универсально, проще всего написать последовательный алгоритм. Для распараллеливания приходится применять специальные ухищрения, под каждую задачу свои, что усложняет написание. Но там где стандарты уже выработались — сразу же переходят к массовому параллелизму, как в видеокартах, реализующих стандарты (CUDA, Vulcan, OpenGL, OpenCL и т.д.), кластерной обработке BigData (Spark, Akka, etc).
AI алгоритмы просто еще слишком сырые, чтобы зашивать в железо. Появятся стандарты — будет специальное «ускоряющее» железо.
Значит вопрос времени. Если железо уже позволяет, то алгоритмы рано или поздно напишут.
Сейчас в нейросетях проблемы известны: дообучение сети без потери опыта, обучение на малой выборке, в идеале на единичном примере, «воображение» — в сторону создания образа и обратную сторону — в создание описания и плана действий из образа. Их медленно, малыми шагами, ошибаясь на тупиковых направлениях, но решают.
Конечно мы не можем напрямую сравнивать синапсы и транзисторы
Очень правильное замечание. Один синапс — это могут быть сотни связей со сложным алгоритмом какие входы суммировать, какие вычитать, при каком пороговом значении выдавать сигнал в нейрон. Т.е. один синапс электронно эмулировать можно десятками… аналоговых (!!!) электронных устройств. Т.е. очень грубая оценка — большие сотни транзисторов на эмуляцию одного синапса «работающего на ввод». Но он же еще и двунаправленный! Он же еще и на выход работает и этот выход тоже меняется не только от сигнала от нейрона, но и от состояния других вводов на синапсе…
Вывод — по железу цель уже достигнута, прорыв не обязателен, нужны обучающие алгоритмы.
Правильный вывод. По железу уже есть человеческий мозг. Нужно правильное обучение и дрессировка.
Человек не может думать 5 мыслей одновременно (пробуйте)
Так мало — дейсьтвительно очень сложно. Вот прямо сейчас — зрительный ввод с экрана, обдумывание что вам ответить, по ноге дует от окна, т.к. днем было тепло, а сейчас холодает, хочется в туалет, пора бы уже и поужинать, завтра на работу и надо печатать проект, не забыть позвонить партнерам утром, чтобы напечатали свой раздел. Ну и еще всякого приватного по мелочи… И это я тут сижу на расслабоне, отдыхаю.
Но я то уникальный и незаменимый, меня точно не смогут заменить. За мной точно не придут.
Скорей всего заменят не прямым аналогом, а чем-то более простым и оптимальным. Что-то вроде колеса вместо ноги. Меньше универсальность, но несравнимо проще и гораздо лучше справляется в своей области (скоростное движение по ровной поверхности).
С распознаванием картинок уже справились (качественнее оператора и на порядки быстрее), постепенно проделают то же с другими отделами мозга. Не сразу, не в один этап, но постепенно сделают.
Как жестко прошитую систему — ЖД можно автоматизировать даже на уровне реле и механических контакторов, для робомобиля нужны более адаптивные алгоритмы. Считалось что справится только человек, а теперь он еще в одной области становится ненужным звеном.
Теперь, ИМХО, для робомобилей придется превратить автомоиль в подобие жд, только без рельсов.
ЖД ветку к каждому подъезду не проложишь.
Вы обратили внимание, что исторически — сеть железных дорог появилась на десятки лет раньше более-менее адекватной сети автодорог? Дорогу Москва-Рига последний «грунтовый» участок заасфальтировали — только вот буквально лет 3-5 назад. А железная дорога Москва-Рига работает уже сильно больше 100 лет.
Почему?
Правильно. Железная дорога — на порядки менее трудоемкая и на порядки более дешевая, чем автодорога. При современных возможностях автоматизации — построить сеть железных дорог до каждого дома и обеспечить проезд от подъезда до подъезда без пробок и задержек — вообще не проблема! И вся необходимая автоматика уже есть! И да, железная дорога к подъезду может не быть полноразмерной. Узкоколейки в конце 19-го века много где использовались в качестве местного транспорта.
Считалось что справится только человек, а теперь он еще в одной области становится ненужным звеном.
В некоторых ситуациях и местах. Да, на трассе в сухую но пасмурную погоду. Тыр-пыр в пробках при определеных условиях. Параллельная парковка, когда нужно четко выполнить «поверните колеса на 18 градусов 3 минуты 52 секунды, проедьте назад 2571 мм, поверните колеса в другую сторону на 18 градусов 3 минуты 52 секунды, проедьте назад еще 2571 мм, поставьте колеса прямо, проедьте вперед 182 мм.»
Смотрел тут на днях классную рекламу, как здорово уворачивается от выбегающих на дорогу детей новая система автоматического торможения. Очень здорово и красиво. Угадайте с трех раз, кого посадят, если автомобиль все же наедет на внезапно выбежавшего на дорогу ребенка? (дам подсказку, не того, кто писал код, и не кого-то из руководства автопроизводителя.)
Вот когда за ДТП по вине робомобилей будут спокойно сажать директоров автопроизводителя вместе со всеми программистами — вот тогда и можно будет начать говорить, что «еще в одной области становится ненужным звеном.»
Да давно уже все придумано — железная дорога
Которая имеет столько ограничений, что не будет заменой безрельсовому трансорту никогда.
сеть железных дорог появилась на десятки лет раньше
Но при этом она меньше, чем автомобильная. О чём это говорит? О том, что соотношение затрат к эффекту в ж/д выше только в фиксированных направлениях (между узлами, от которых "последнюю милю" добивают автотранспортом). Цена прокладки, обслуживания, сложность маршрутизации, сложность масштабирования накладывают ограничения.
на порядки менее трудоемкая
Сразу видно кто ж/д видел только из окна поезда. Да и то не видел особо.
Угадайте с трех раз, кого посадят,
Никого? Это правильный ответ!
Почему в моду вошли «бампера в цвет кузова»?
Люди не любят ломать ноги рельсой и нужна амортизирующая часть, а уж какого она цвета — всё равно, красить и так и так нужно.
Люди не любят ломать ноги рельсой и нужна амортизирующая часть
Вы, возможно, не в курсе, но примерно все автопроизводители выпускали прототипы автомобилей с резиновыми бамперами и разными системами бамперов, которые полностью восстанавливают свою форму после ДТП. И в том числе с целью снизить повреждения пешеходов. Однако в серийное производство пошли очень немногие из этих концепций и на очень небольшое время.
А уж какого цвета делать резину и пластик… Фиат вполне успешно экспериментировал с окраской пластиковых деталей на всю толщину. В результате чего все царапины на этих деталях… были в цвет кузова и почти не видны. Но, опять же, в серию — так и не пошло.
Никого? Это правильный ответ!
Ээээ… Если пострадает ребенок? Кто-то обязательно сядет. Если не производитель ПО и не производитель автомобиля… Остается водитель. И суду будет не очень интересно, была там система обнаружения выбегающих детей или нет. Оператор средства повышенной опасности несет ответственность за безопасность свою и окружающих.
Сразу видно кто ж/д видел только из окна поезда. Да и то не видел особо.
Я сразу догадался, что вы ЖД не видели никогда. И строительство современной дороги — вы тоже не видели. Основные проблемы на строительство железнных дорог возникают там, где большие перепады высоты и крутые градиенты. Поезда такое не любят. Но если местность относительно плоская — строительство железной дороги намного менее затратно.
сложность маршрутизации
Пожалуй это — единственная проблема… была. Сейчас возможности компьютеров достаточны для того, чтобы реализовать примерно полную маршрутизацию в реальном времени.
Цена прокладки, обслуживания,… сложность масштабирования накладывают ограничения.
Почему же тогда от роторных экскаваторов из карьеров руду/уголь поездами вывозят? Это же железнодорожную ветку нужно чуть ли не каждый месяц перекладывать по новому маршруту! Но… это полностью окупается. А карьерные самосвалы используют в основном там, где приходится закапываться слишком глубоко на небольшой площади, т.к. перепад высот слишком большой, чтобы состав вытянуть.
примерно все автопроизводители выпускали прототипы автомобилей с резиновыми бамперами и разными системами бамперов, которые полностью восстанавливают свою форму после ДТП.
Цена массового производства, всякие штуки с амортизаторами в бамперах, которые позволяли бамперу "играть" на малых скоростях. Только эти системы сложны, могут ломаться, не работают на больших скоростях, всё ещё опасны для пешеходов. Окрашенная резина или пористая или имеет покрытие, которое после аварии так же восстанавливается за деньги (т.е. привет плач о жадных производителях).
Но, опять же, в серию — так и не пошло.
Это задолго до Fiat'а было, даже с деревом экспериментировали. И вы сможете догадаться почему не пошло (подумать чуть-чуть). Ну как, получилось?
- Цвет будет чуть отличаться (или придётся наносить слой поверх).
- Цена изготовления.
- Разнообразие и унификация — сделать 1500 бамперов и окрасить 1499 в белый и 1 в чёрный или сделать 750 белых, 750 чёрных, а потом 749 белых и оставить на складе 749 чёрных в виде связанных средств и оплачиваемого места идея так себе.
Если пострадает ребенок? Кто-то обязательно сядет.
Ребёнок в стране, где нет разработчкиов. Конечно, "это жеребёнок" страшное пугало, но не рабоатет.
Остается водитель
Нет водителя.
строительство железной дороги намного менее затратно.
Вывести подкладку под полотно значинельно ровнее, чем под дорогу, рельсы со шпалами (и укладкой, щебнем), электричество против дороги. Сомнительно.
cейчас возможности компьютеров достаточны для того, чтобы реализовать примерно полную маршрутизацию в реальном времени.
А пути соединять на компьютере будете? Вы правда железную дорогу видели?
Почему же тогда от роторных экскаваторов из карьеров руду/уголь поездами вывозят?
Раз в месяц — это редко, роторный экскаватор переезжает медленно сам по себе, ветка одна (нет маршрутизации), объёмы большие и стабильные.
Нет водителя.
Как нет водителя? Водитель, пока еще, во всех «автономных автомобилях» — есть. Можете назвать его оператором. Если это будет робо-такси без водителя — сядет владелец ТС.
Эти все хи-хи-ха-ха — очень здорово. Но без определения кто и в какой мере отвечает за робомобиль и всяческие авто-тормозилки — у нас и у вас скоро будет «дикий запад», где будет практика «погиб под робомобилем? сам дурак!»
Робомобили собираются останавливаться в начале и конце пути. А метро тормозит каждые несколько минут.
Робомобили собираются останавливаться в начале и конце пути.
Все вместе? :)
Нет. Свернул на второстепенную дорогу, потом на парковку/двор, там остановился. Держать дистанцию в метр ради экономии топлива во дворе никому в голову не придёт.
Но на самом деле я скорее согласен с вами, робомобили не будут притираться друг к другу, в этом нет смысла. Просто равномерное движение без шашек в экспериментах даёт удвоение пропускной способности дорог.
Просто равномерное движение без шашек в экспериментах даёт удвоение пропускной способности дорог.
А можно ссылку? А то вот в моделях, над которыми издевался я, оптимальный результат достигался только если каждый разгон — с «тапкой в пол».
А в других экспериментах (ссылку не приведу, не сохранил) обнаружили, что если каждый из водителей всеми силами маневрирует, газует и разгоняется для того, чтобы максимально быстро добраться до места назначения… то и поток в среднем движется намного быстрее.
Эксперимент не нашел, тезис снимаю. Но нашел хорошую иллюстрацию, на мой взгляд разумную. Про шашечки начинается с 2:20
Две полосы, справа едут медленно и с дырками, слева как получится и тоже как получится. Всегда найдётся спринтер, который лавирует по разрывам, и часто слева встраивается, невзирая на поток.
который лавирует по разрывам
Обратили внимание? Т.е. люди занимаются за рулем чем угодно, кроме смотрения на дорогу. Естественно найдется кто-то, кто оторвал глаза от телефона и перестроится в «разрыв». Это то самое, о чем я писал — люди забывают, что когда впереди машина уезжает на 100 метров — надо ехать. А потом возмущаются, что кто-то имел наглость перед ними «нагло влезть (!!!) их нагло подрезав (!!!)». Просто они были заняты писанием в яндекс про ужасы пробок, и не заметили, что машина, которая их «нагло подрезала» минуту перед этим стояла с включенным поворотником, чтобы перестроиться. И водитель ее, наивный, подумал, что это не тормоз за рулем сидит, а его вежливо пропускают…
Особенно если в правом едут 85, и это таки опережение. Но лавирующие гонщики
Что-то надо делать с определениями…
Две полосы, справа едут медленно и с дырками
Медленно это 85? На трассе с ограничением 90?
Можно я вам напомню мой тезис, с которым вы сейчас спорите?
«Перестроения при вот такой вот примерно нулевой скорости — в глобальном плане ничего не меняют. Опять же, перестроения возникают почти исключительно, когда кто-то в другом ряду решил не ехать, когда все в его ряду поехали».
Обратите внимание я не утверждал, что «гонщиков» не существует. Но они достаточно редки, чтобы не оказывать глобального влияния на движение в пробках. Именно о пробках идет речь по ссылке, приведенной Hardcoin, к которой относился мой комментарий.
Но лично наблюдаю постоянно: две полосы в одном направлении, справа 80 слева 85 (или 50 и 55, не принципиально) и длинный хвост ждущих, когда, наконец, левый достаточно обгонит, чтобы славировать и уйти вперёд на 110+ (или 80+). И как только появляется возможность — весь этот хвост (до 10 машин видел) делает зигзаг и уходит к следующей паре или светофору.
Да, перегоны у нас есть достаточно длинные для таких манёвров, от 2 до 10км внутри города
А если поворачивать и перестраиваться как можно реже, привод на электротяге, то все уже давно изобретено — железная дорога.
у них сейчас разгон до 100 выше
Вы забыли сказать, что у машин за 50+ тысяч долларов. У остальных — хорошо если они в принципе до 100 км/ч разгоняются. Тот же Leaf 2018 года, наконец, доработали. Разгон до 100 км/ч — уже 8 секунд. Неплохо — но это уже уровень бензиновой машины такого же класса со 150 л.с. (то есть — почти любой).
И еще не забывайте, что в США можно получить штраф за слишком быстрое ускорение на дороге. Машину с 3 секундами до сотни продавать можно, но вот разгоняться на ней так — нельзя.
(ну и да, как будем обеспечивать строго идентичную калибровку спидометров всем машинам? В районе 130 км/ч, разрешенных на многих магистралях в Европе, разница показаний спидометров разных моделей машин может быть под 15 км/ч. И опять возникнут, теперь уже автопилоты, которые думают, что все остальные едут слишком медленно и надо их объехать.)
Вы забыли сказать, что у машин за 50+ тысяч долларов.У любых. Пассат на 180 лошадей сравним с Лифом на 150 лошадей. На сейчас электромобили быстрее разгонятся от аналогичных автомобилей с ДВС. Это физика, а не какая-то там реклама или маректинг. Ладно, это одно и тоже, по 10-му кругу.
И еще не забывайте, что в США можно получить штраф за слишком быстрое ускорение на дороге.И к чему это ваше уточнение? Это ваши пожелания по поводу того, как нужно двигаться по дорогам.
Европе, разница показаний спидометров разных моделей машин может быть под 15 км/ч. И опять возникнут, теперь уже автопилоты, которые думают, что все остальные едут слишком медленно и надо их объехать.)И? Это проблема автопилота? Это проблема разных «линеек» (у меня дома 3, на 30 см ни одна не сходится). Более того, я описал цель, вы же сразу нарисовали проблему. Да, проблем и сложностей более, чем достаточно. Даже сейчас с мега классными водителями, которые считают, что им нужнее.
Всё же, хотелось бы увидеть симуляцию движения, которое вы предложили. Ибо теория говорит об обратном.
Пассат на 180 лошадей сравним с Лифом на 150 лошадей
Сравнивать Leaf нужно все же с Гольфом. Гольф с разгоном до сотни за 8.2 с стоит в России 1 689 900 рублей. Примерно 26000 долларов. С нашими офигевшими пошлинами. Лиф — в США стоит от 29500 долларов. С американскими скидками «за экологичность».
Даже в таком варианте — на разницу в цене гольфа и лифа на гольфе можно проехать что-то типа 70 тысяч километров, если считать, что лиф заряжается полностью бесплатно (что чуть-чуть не совсем всегда правда).
Да, проблем и сложностей более, чем достаточно.
Проблем — ровно одна. Существует более одного производителя автомобилей. Как ни крутись — а пока на дорогах больше одной модели автомобилей с роботом, или одна модель автомобиля с роботом, но более чем с одной версией прошивки робота — будут проблемы, аварии и жертвы. Ну и да, как минимум каждый год весной и осенью в один и тот же день у всех и каждого из робомобилей должны менять колеса, чтобы у всех были строго одинаковые сцепные свойства колес с дорогой, строго одинаковая глубина протектроа, строго одинаковая скорость начала аквапланирования в лужах и вот это вот все.
Проблем — ровно одна.Тише едешь, дальше будешь.
Чем выше скорость, тем хуже последствия
Только немцам, пожалуйста, не рассказывайте!
В Германии с отсутствием ограничений на весьма большой части автобанов — 4.2 погибших на миллиард автомобиле-километров. В соседней Голландии с жесткими ограничениями и суровыми наказаниями за превышение скорости, при том, что страна примерно идеально плоская и не имеет, кажется, неосвещенных дорог — 4.7 погибших на миллиард автомобиле-километров.
С другой стороны — Чехия — больше 12 погибших на миллиард автомобиле-километров. И, что интересно, дороги хорошие, ограничения жесткие.
В США, где, если я правильно понимаю, большая часть страны вообще имеет ограничение порядка 80 км/ч — 7.3 погибших на миллиард автомобиле-километров.
Так что, при беглом взгляде на статистику, ваш тезис не подтверждается.
Да, когда нет ДТП — да, отлично, но ДТП при 60 км/ч и 160 км/ч — это большая разница.
И в чем эта разница? Правильно! В том, что значительная часть ДТП на 160 — это удары об отбойник по касательной со скоростью касания в единицы метров в секунду, или удары в другие машины по касательной, или удары в машины движущиеся 140-150. Или попадания под машину, движущуюся 170-180. Если все пристегнуты, погибнуть — достаточно нетривиальная задача.
Что мы имеем при ДТП на 60? Неподвижные автомобили, встречные автомобили, столбы, деревья, здания, пешеходы… Тоже есть вероятность выжить. И даже пешеходы не все гибнут. Но — это тоже вероятность! Выживание при ударе на 60 км/ч на машинах получивших пять звезд по новейшим методикам тестирования — достаточно вероятно. Но все еще далеко не 100%.
Что это значит? А значит это, что «самоочевидное» ваше утверждение про тяжесть последствий — нужно, по-хорошему, чем-то подтвердить. Не просто результатами удара в столб на 160, а хотябы статистикой, сколько таких ДТП в принципе случается.
без ссылок понять сложно о чем речь
List of countries by traffic-related death rate
Статья в википедии с выжимкой информации из публикаций ВОЗ на эту тему. Со ссылками на публикации ВОЗ. Обратите внимание, что самые высокие показатели смертности — в странах, где в принципе разогнаться выше 40 км/ч — физически негде! (на самом деле, конечно, если подготовленная машина для трофи-рейда типа Париж-Дакар — можно и там разогнаться. Но там, если все жители страны скинутся, на одну такую машину денег может не хватить.)
Location characteristics
Most crashes where car occupants get severely injured occur at road sections (66%-
79%) and on rural roads (50%-69%). This agrees with the fact that car occupants get
particularly severely injured at roads where the speed limits are high (≥70km/h).
There are some small speed limit differences between countries, but the general
picture shows mainly a large number of severely injured car occupants with high
speed limits.
Contributing crash factors
For some of the databases, there was evidence for other contributing crash factors.
For severe crashes leading to severely injured car occupants, the following were found
to be most common:
Loss of control (40-58%);
Speeding and/or inappropriate speed (35-56%);
Careless / reckless behaviour (23-49%);
Driver under the influence (drugs/alcohol) (18%);
Failed to look properly (17%);
Road condition (wet/icy/poor surface;
Потеря управления и превышение скорости — основные факторы ДТП, при этом, нужно понимать, что чем больше скорость, тем меньше времени на реакцию.
www.curbed.com/2017/7/28/16051780/us-traffic-death-speeding-statistics-speeding
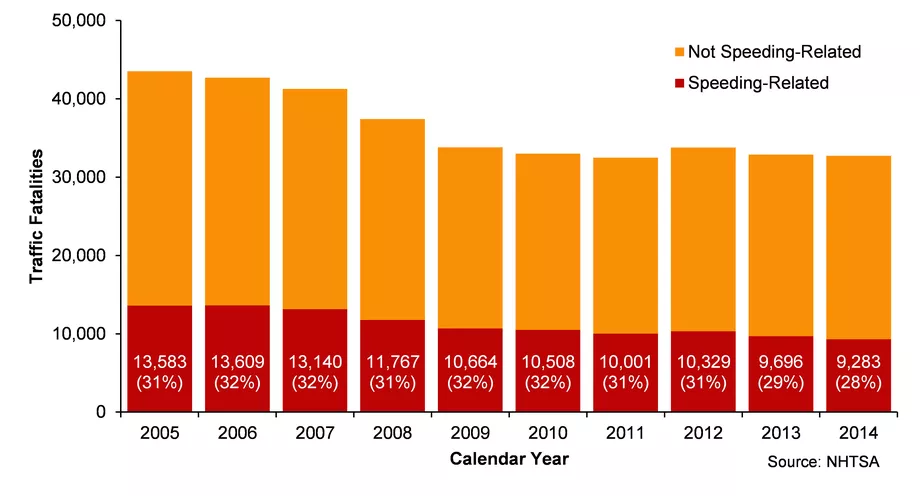
Опять же «speeding related» требует подробного и тщательного разъяснения. Это была потеря управления из-за превышения скорости, или это кто-то не глядя в зеркала и не включая поворотник перестроился, когда кто-то рядом превышал скорость?
Most crashes where car occupants get severely injured occur at road sections (66%-
79%) and on rural roads (50%-69%).
Эээ… В сумме мы получаем 116-148%… Кто и в чем врет? Или мы просто считаем некоторые ДТП по три раза в статистике? Т.к. очень хочется получить разрешение на установку еще одной тысячи камер, которые выписывают штрафы, которые оплачиваются через удобный оффшор?..
Поезда состоят из вагонов. Которые едут вплотную друг за другом.
Насколько я знаю, там дистанция между вагонами выдерживается аппаратными средствами. И это не электроника.
Это до сих пор не реализовано в автомобилях только по одной причине. Бампера на замену — одна из очень больших и важных статей доходов автопроизводителей и страховых компаний. Почему в моду вошли «бампера в цвет кузова»? Правильно, к кормушке еще допустили автосервисы, которые умеют красить, и производителей краски. Я помню бампера на своей зубиле 89-го года выпуска (моя первая машина). Сколько раз я ими куда-нибудь парковался. Сколько раз мне приезжали в зад, сколько раз на меня откатывались впереди стоящие машины на горках… Вообще никаких следов на самих бамперах. Только краску чужую стереть тряпочкой — и не найдешь, кто и что там было. Но уже буквально году в 93-м ВАЗ заменил тип пластика и точно такой же внешне бампер при ударах начал… раскалываться на мелкие части. Которые еще и невозможно было ни склеить, ни сварить. Только менять целиком!
Проблемы робомобилей лежат не в области технологий. Мы практически доделали эту технологию за последнее десятилетие.
Ну конечно. Проблема сейчас именно в технологиях. Сейчас ни один из робомобилей не может:
1. надежно, на уровне человека, определить все имеющиеся препятствия и движущиеся объекты на дороге
2. надежно, на уровне человека, определить дорожное полотно
Если кто сомневается, то попробуйте разработать робота, способного автономно передвигаться как робомобиль. Робота-газонокосильщика или доставщика по городу. Поищите какие алгоритмы и оборудование для этого можно применить на текущем уровне технологий. И сразу все станет ясно.
Если текущие робомобили выпустить в свободное плавание, то они, в силу обозначенных выше проблем, будут регулярно:
1. сбивать людей и врезаться в препятствия
2. иногда произвольно съезжать с дороги
Поэтому их и не выпускают.
Второстепенные проблемы, следующие из основных:
1. робомобили пока не могут предсказать (на уровне человека) траектории других, уже распознанных, объектов. Вроде намерения другой машины затормозить перед поворотом.
2. распознать опасные места и снизить скорость, например если к дороге вплотную подходит угол здания, из-за которого могут выскочить пешеходы
Эти проблемы второстепенные, потому что их можно относительно легко решить: первую чисто алгоритмически, как только сможем распознавать все объекты и препятствия на пути. А вторую либо разметив такие зоны вручную в городах, либо проанализировав статистику живых водителей и автоматически отметив места где они притормаживали.
Как только технологии позволят надежно, не хуже человека, распознавать окружающую трехмерную обстановку, робомобили сразу же появятся на дорогах. И всем будет глубоко плевать на любые этические и прочие проблемы, которые приписывают будущим робомобилям. Это дело чисто технологий, не более того.
Гораздо интереснее, как выкрутятся всякие уберы, мечтающие о беспилотных такси. В такси-то по определению может ехать кто угодно: иностранец, без прав, пьяный, сонный, и т. п. Скорее всего, им придётся держать табун удалённых операторов, смотрящих в камеру и перехватывающих управление в случае необходимости.
По вине человека 90% ДТП
Ну вообще-то, даже в США по вине «состояния улично-дорожной сети» — по разным источникам что-то до 30-50% ДТП — коряво поставленные знаки, противоречивые знаки, отсутствие разметки, ямы на дорогах, снег-лед и т.п. В России — такие ДТП — прочно удерживают первое место, обгоняя «нетрезвых водителей» — чуть ли не в разы. Это при том, что статистику «пьяных ДТП» — натягивают как могут. Если водитель не идеально трезв — в статистику попадет только это. Без упоминания, что у него колесо в яме оторвалось ночью на неосвещенном участке дороги без разметки и знаков, а навстречу ему ехал автомобиль с выключенными фарами.
Вы же привели пример, что «служители правопорядка» могут и ошибиться. 0.2 промилле «в выдохе» можно легко получить, например, если перед выходом из дома побрызгаться одеколоном и попасть на гаишников через минут 5-10. Я даже не говорю про мелочь, что у здорового человека, не являющегося завязавшим за день до белой горячки алкоголиком, спирт в крови — должен быть. «Ноль» быть не может. У человека, который никогда в жизни не употреблял спиртного, в крови легко могут быть те самые 0.2 промилле по жизни. А это уже лишение прав и тюрьма…
в ДТП погибают уже более 1 млн людей в год
Не «уже», а «все еще». «Уже» — было лет 40-50 назад. В Великобритании, например, пик количества погибших пришелся вообще на 1939-1940 годы. Потом был небольшой всплеск в 70-х и с тех пор — постоянное снижение количества погибших.
и это число неумолимо
… снижается ежегодно. Настолько — что даже не публикуются статистические данные «год за годом». Вплоть до того, что Гугль на запрос «car accident deaths per year worldwide» выдает статистику… по погибшим в авиакатастрофах!
Если вдруг у вас есть другие данные — пожалуйста, «пруфы в студию». Графики, желательно хотябы с 1950-го года. Если нет — то с 1970-го. Источники информации, ссылки, все такое.
Проблема не в робомобилях, она в машинах, которые не ведут сами себя, а которые водят такие идиоты, как я.
Если робомобили не умеют ездить в таких условиях то зачем тогда заявлять что с технической стороны они готовы? А то получается что они как бы готовы, но в тепличных условиях. Но в реальности тепличных условий нигде не будет, а значит они не готовы.
Они, может, и готовы показать сравнимый с человеком уровень аварийности, но кто ж им позволит?!
Дело в неготовности общества прощать роботу то, что элементарно прощают человеку.
Миллион жертв в год?
И ничего страшного.
А вот если это будут роботы — не простят и сотен. И речь не о тысячах сотен.
От роботов ждут как минимум на порядки большей безопасности и предсказуемости, чем ожидают от человека за рулём.
Это будет, но не так скоро.
Потому что нетерпимость человека к ошибкам робота растёт быстрее, чем повышается их надёжность.
А требовать от бабушки 90-а лет, которая права получала 20 лет назад, и решила выехать на трассу только сейчас, да ещё в очках, и видит только поверх руля на ближайшие 30 метров (и то в хорошую погоду) не садиться за руль — вы не запретите.
Можно политически ввести новый вид толерантности. Срок за плохое высказывание об автопилоте, например. А еще лучше материальные компенсации роботам за века безжалостной эксплуатации техники человеками :)
т бабушки 90-а лет, которая права получала 20 лет назад… вы не запретите
Кто вам такую глупость сказал? Если водитель не прошел медкомиссию — ему не продлят действие водительских прав. Если человек без водительских прав находится за рулем — ответственность, в зависимости от последствий и ситуации — вплоть до уголовной.
Опять же, если водитель совершил более-менее серьезное ДТП — его могут отправить на медицинское обследование и лишить прав по медицинским показаниям. Да, не во всех странах мира. Но в более-менее развитых — оно работает так.
Кто нибудь запретил эксплуатацию «автопилота» после того, как подслеповатая камера не увидела фуру поперек дороги?.. Кто-нибудь запретил эксплуатацию «автопилота» когда после нескольких «обновлений и улучшений автопилота» снова погиб человек в точно такой же ситуации?
Роботам сейчас прощают примерно все. Люди любят роботов.
кейс с бабушкой там реален
И все, кто в ФИДО — знают это из кино про аварийную посадку MD-какого-то на шоссе, с парнем в Джипе большом широком и бабушкой в Кадиллаке 60-х.
Но кроме мягкости медкомиссии в США есть суд, который после ДТП может просто запретить человеку садиться за руль пожизненно. И такие прецеденты, на сколько я знаю, в отношении попадавших в ДТП старушек — были. Ссылок на штаты, судей и т.п. — не приведу. Просто лень искать. И на ситуацию в Москве — никак не повлияет.
Машины всегда служили по 10 лет
А как же запланированное устаревание, когда "сейчас машины и несколько лет не служат, а вот раааааньше"? Хотя, у некоторых уже тот самый 2006й — это то самое "раньше".
так как в момент страгивания еще нет информации ни о скорости ведомых колес ни о кажущейся скорости и ее вектор
Информация появляется после небольшого поворота (несколько градусов), посмотрите как работает имитация блокировок.
вычислительная мощность человеческого мозга на несколько порядков боьше
В распознавании образов, в определении расстояния с точностью до мм — нет. Сколько от вас до двери точно скажете? Вы только начали на дверь смотреть (отдали команду неспешным мышцам), а аппаратная система уже измерила и передала данные, как следствие — сигнал на исполнительные механизмы пошёл быстро, а у человека должен ещё до мышщ ноги дойти, потом через механическое взаимодействие с педалью, которая пошлёт воздействие к тормозным механизмам. Долго.
Компьютеров способных на это пока что нет и близко.
Компьютер не нужен, копеечный дальномер справится значительно лучше.
А робомобили собираются ездить по кольцу и без остановок?
Они высаживают пассажиров, остановившись посреди полосы на шоссе? Рельсы — причина интервалов (вместе с обозначенными выше), потому метра там не будет никогда.
Компьютер не нужен, копеечный дальномер справится значительно лучше.
Нам нужно измерять расстояния или ехать?
Расстояние лучше измеряет лазерный дальномер. Но ездить лучше получается пока что у велосипедистов. Им нужно не расстояние с точностью до миллиметра, а предстазание будущей траектории. С этим у дальномеров пока ИМХО никак.
Вы или указывайте конкретные модели, где имитация блокировок работает «никак» или посмотрите:
И в каком месте оно опровергает мною сказанное!?
Она работает если лед под ОДНИМ колесом!
Там ролики под тремя колесами и две машины, из трех, справляются с этой задачей.
А лед под ДВУМЯ колесами в моноприводном авто = тележки под ЧЕТЫРЬМЯ колесами в этом вашем видео… (которое непонятно зачем вы притащили ибо про полный привод вообще речи не было).
Что ясно показывает, что имитация блокировок уже давно успешно справляется со своей задачей.
Если это монопривод, понятное дело, что ролики/лед будут под одним колесом, если подключаемый полный привод — ролики будут под тремя колесами.
Ясное дело, если ролики/лед будут под всеми колесами, выбраться из этой ситуации будет непросто и с полноценными блокировками, к чему это было?
Так можно и внедорожник на пузо посадить и сделать вывод, что полноценный полный привод работает «никак».
На этом можно сделать вывод, что миф о «никакой» работе имитации блокировок развеян.
— Как то очень издалека зашли журналисты. Сказали бы прямо — людишки мешают развитию робототехники и социальному прогрессу.
Шагают не строем и не в ногу, некомпетентно мыслят, думают о чем попало, неправильно голосуют, вносят смуту и бардак в стройные ряды.
В этом году не будет никаких робомобилей, что бы там Илон ни рассказывал