Введение
Задача измерения параметров газовой смеси широко распространена в промышленности и торговле. Проблема получения достоверной информации при измерении параметров состояния газовой среды и её характеристик с помощью технических средств разрешается принятыми в стандартах методиками выполнения измерений (МВИ), например, при измерении расхода и количества газов с помощью стандартных сужающих устройств [1], или с помощью турбинных, ротационных и вихревых расходомеров и счётчиков [2].
Периодический газовый анализ позволяет установить соответствие между реальной анализируемой смесью и её моделью, по которой в МВИ учитываются физико-химические параметры газа: состав газовой смеси и плотность газа при стандартных условиях.
Также в МВИ учитываются теплофизические характеристики газа: плотность при рабочих условиях (давление и температура газа, при которых выполняют измерение его расхода или объёма), вязкость, фактор и коэффициент сжимаемости.

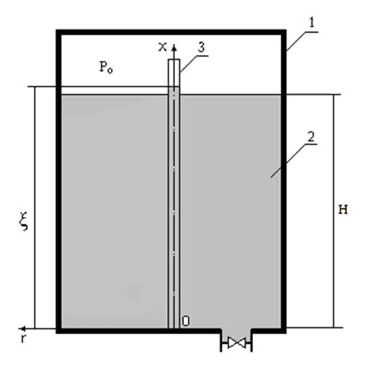
 — уровень жидкости в канале, H — уровень жидкости в баке, r,x — координатные оси.
— уровень жидкости в канале, H — уровень жидкости в баке, r,x — координатные оси.














 и скорость реактивной струи Cn постоянны на каждой ступени, однако на разных ступенях могут принимать различные значения. В обеих задачах в качестве целевой функции принят коэффициент полезной нагрузки ракеты G, который необходимо минимизировать.
и скорость реактивной струи Cn постоянны на каждой ступени, однако на разных ступенях могут принимать различные значения. В обеих задачах в качестве целевой функции принят коэффициент полезной нагрузки ракеты G, который необходимо минимизировать.