Сергей Белёв, старший математик‑программист, C3D Labs, знакомит с новым компонентом C3D Toolkit — модулем C3D Collision Detection, рассказывает о том, что детектор столкновений представляет собой изнутри, и о том, какие возможности он предоставляет пользователям.
Детектор столкновений — новый компонент инструмента C3D Toolkit. В статье перечислим математические задачи, которые поставлены перед детектором, узнаем его основной функционал, рассмотрим несложный пример, демонстрирующий интерфейс модуля, и обратимся к планам и дорожной карте.
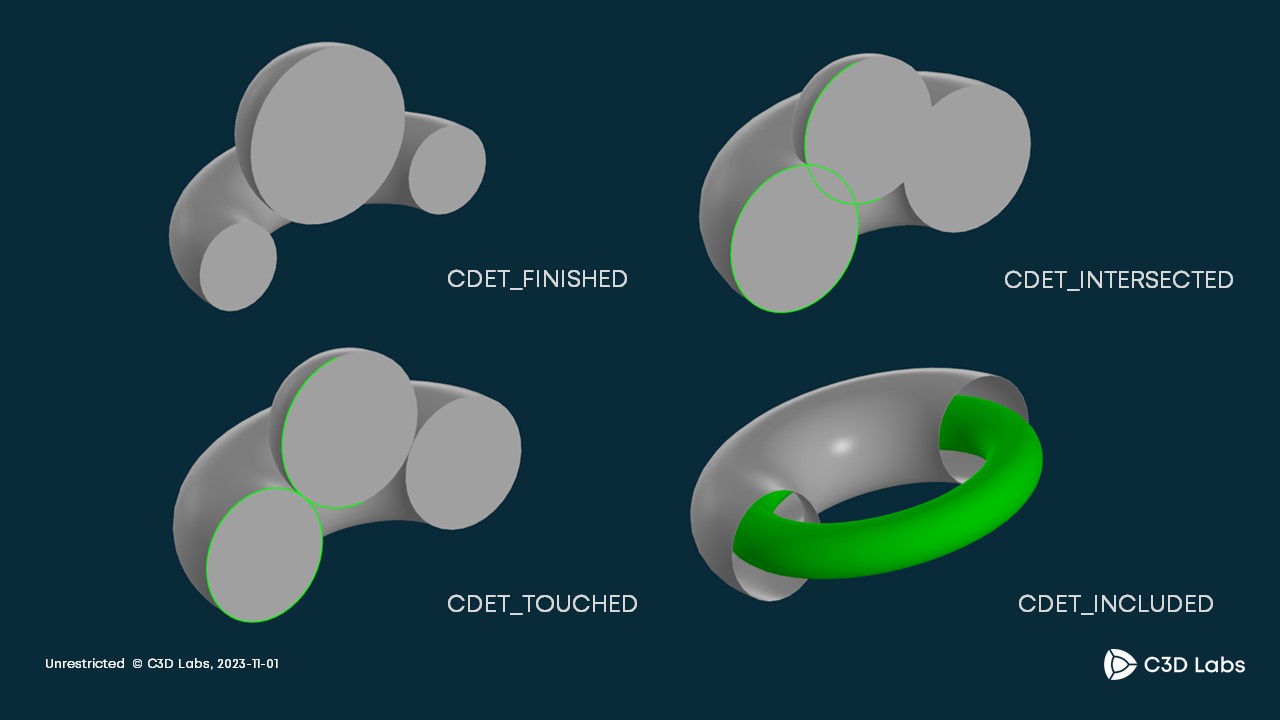
Обнаружение столкновений подразумевает постановку следующих математических задач. Первая — это возможность уметь находить пересечения между собой среди множества объектов и делать это быстро, без поиска самого пересечения. Требуется оперативно отвечать на соответствующий вопрос — «да, пересекаются» / «нет, не пересекаются». Следующая задача состоит в классификации касаний между собой этого множества объектов. Каждое касание является пересечением, но не наоборот, и важно уметь выделять этот частный случай пересечения. Помимо этого, актуальна задача поиска минимального расстояния между сборками тел и телами, а также задача классификации взаимного расположения объектов. Примером служит детектирование «вложения тел» («тело в теле»), недавно внедренное нами в ответ на многочисленные запросы пользователей. Важно отметить, что все эти задачи нужно уметь решать как в статике, так и в динамике.
Модуль C3D Collision Detection, во‑первых, реализует «эффективные» алгоритмы решения всех поставленных задач — как в статических сценах, например контроль зазоров, так и в динамических сценах, в частности контроль соударений между элементами сборки. Во‑вторых, у нас есть возможность тонкой настройки всех формулируемых задач — можно даже создавать их комбинации. В‑третьих, исходя из необходимости быстро детектировать касание/пересечение, применяется принципиально иной подход, чем в булевой операции: мы не строим какие‑либо дополнительные объекты.