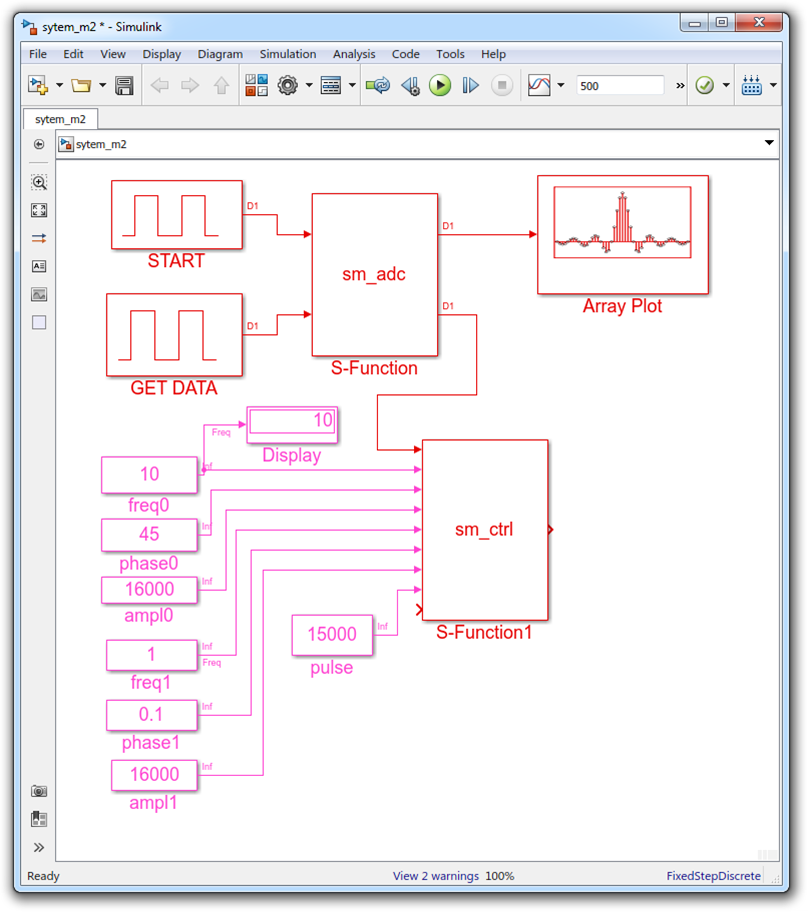
Важной практической задачей является использование Matlab/Simulink с реальной аппаратурой которая позволит принять сигнал из реального мира. Это очень полезно для отладки алгоритмов. В данной работе представлена технология подключения к Simulink устройств АЦП производства АО «ИнСис». Для подключения используется DLL, которая видна в Simulink как компонент sm_adc. Для работы с аппаратурой используется отдельная консольная программа. Связь с DLL производится через разделяемую память. По данной технологии могут быть подключены любые АЦП на любых несущих модулях АО «ИнСис». В работе представлена система из генератора A7_DAC и модуля сбора FMC128E/FM412x500M.
Данная работа демонстрировалась на конференции «Технологии разработки и отладки сложных технических систем» 27-28 марта 2018 года.
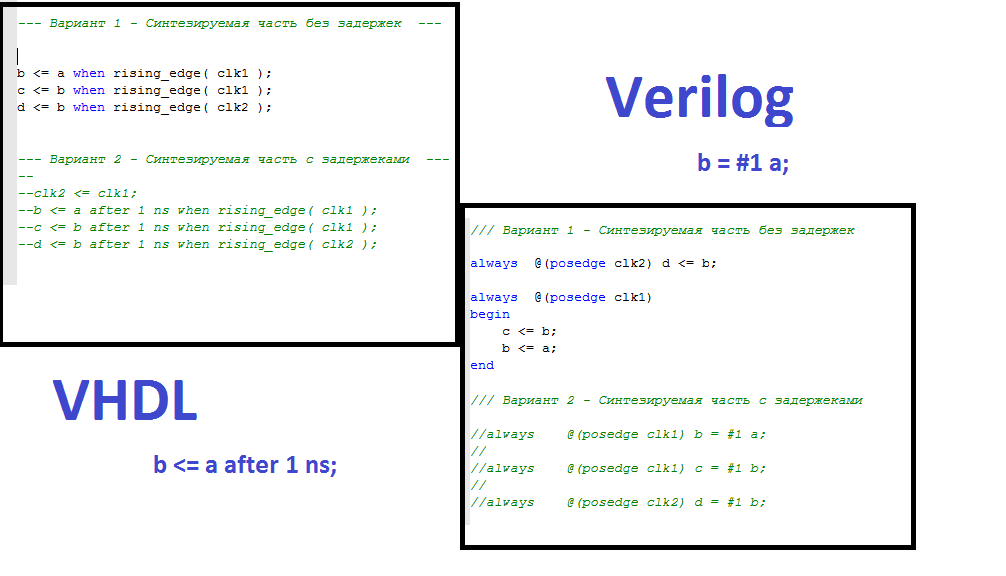
Некоторое время назад при обсуждении в компании профессиональных разработчиков FPGA возникла дискуссия о прохождении собеседования. Какие вопросы там задают, и что можно было бы задать. Я предложил два вопроса:
Приведите пример синхронного кода без использования задержек, который даст разные результаты при моделировании и при работе в реальной аппаратуре
Исправьте этот код при помощи задержек.
После этого вопроса завязалась оживлённая дискуссия, в результате которой я решил более подробно рассмотреть этот вопрос.
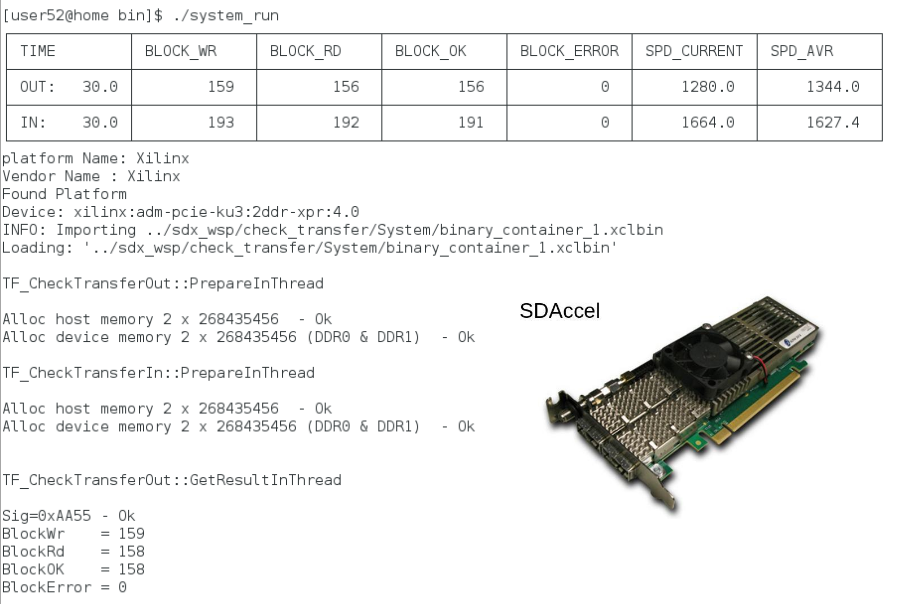
В предыдущей статье «SDAccel – первое знакомство» я попытался описать основы применения OpenCL на ПЛИС Xilinx. Теперь настало время поделиться результатами экспериментов по передаче данных на модуле ADM-PCIe-KU3. Проверяется передача данных в обоих направлениях. Исходный код программ размещён на GitHub: https://github.com/dsmv/sdaccel
SDAccel это система программирования на OpenCL для ПЛИС фирмы Xilinx. В настоящее время всё более обостряется проблема разработки проектов для ПЛИС на традиционных языках описания аппаратуры, таких как VHDL/Verilog. Одним из методов решения проблемы является применение языка C++. OpenCL это один из вариантов применения языка С++ для разработки прошивок ПЛИС.
FIFO это один из ключевых элементов цифровой техники. Это память типа «первым вошёл-первым ушёл» (first input – first output). Меня как разработчика ПЛИС FIFO окружают повсюду. Собственно я только и делаю что беру данные из одного FIFO и перекладываю в другое. Но как оно работает? В современных САПР конечно уже есть готовые элементы, у Altera есть замечательные мегафункции. У Xilinx есть Core Generator. Но что делать если что-то не устраивает в стандартных решениях? Ответ один – разобраться и написать самому.
Современные ПЛИС содержат мультигигабитные линия связи и существует большое количество протоколов для обмена. Однако при ближайшем рассмотрении применять стандартные протоколы в ПЛИС не всегда удобно. Например для ПЛИС Xilinx доступны реализации PCI Express, RapidIO, Aurora; У каждого из них есть недостатки. PCI Express и RapidIO работают с кодировкой 8/10 что сразу ограничивает пропускную способность. Aurora может работать с кодировкой 64/66 но не обеспечивает восстановление данных после сбоя. С учётом недостатков стандартных протоколов и особенностей применения я решил реализовать свой протокол обмена.
В компьютерах уже давно есть шина PCI Express v3.0 x16; Тесты современных видеоадаптеров показывают на этой шине скорость около 12 Гбайт/с. Хотелось бы сделать модуль на ПЛИС который обладает такой же скоростью. Однако доступные ПЛИС имеют HARDWARE контроллер только для PCIe v3.0 x8; Реализации SOFT IP Core есть, но очень дорогие. Но выход есть.
Джиттер это дрожание фронта тактового сигнала. Чем меньше джиттер тем лучше. Большой джиттер ухудшает параметры АЦП, ухудшает трассировку ПЛИС. Однако есть ситуации когда джиттер полезен. Например его можно использовать при автоматической подстройке тактовой частоты.
Конечные автоматы играют очень важную роль при разработке прошивок ПЛИС. Все слышали о двух классических типах автоматов: автомат Мили и автомат Мура, которые были предложены ещё до эпохи ПЛИС. Однако специфика построения ПЛИС вносит свои коррективы и в процессе работы у меня сложился вполне определённый стиль описания автомата.
Интерфейс ADM это внутренний стандарт компании «Инструментальные Системы». Он определяет правила соединения субмодулей ADM и базовых модулей. Ключевым элементом интерфейса является ПЛИС ADM. Изначально использовались ПЛИС серий FLEX10K и Acex 1K фирмы Altera. В 2003 году начался переход на ПЛИС Xilinx. Используются практически все серии ПЛИС от Spartan 2E до Kintex Ultrascale. Базовым элементом проекта ПЛИС является «тетрада». Данная статья именно об этом.