Взбрело мне в голову написать несколько статей, о том как реализованы некоторые структуры данных в Java. Надеюсь, статьи будут полезны визуалам (картинки наше всё), начинающим java-визуалам а также тем кто уже умеет писать new ArrayList(), но слабо представляет что же происходит внутри.
Сегодня поговорим о ArrayList-ах
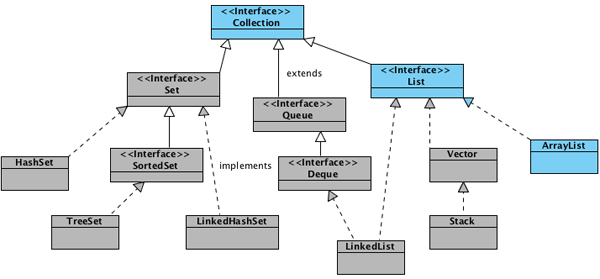
ArrayList — реализует интерфейс List. Как известно, в Java массивы имеют фиксированную длину, и после того как массив создан, он не может расти или уменьшаться. ArrayList может менять свой размер во время исполнения программы, при этом не обязательно указывать размерность при создании объекта. Элементы ArrayList могут быть абсолютно любых типов в том числе и null.
Цифровые и аналоговые датчики, подключенные к Arduino, генерируют большие объёмы информации, которая требует обработки в реальном масштабе времени [1].
В настоящее время данные от Arduino распечатывают из командной строки или отображают в графическом интерфейсе с запаздыванием. Поэтому данные в режиме реального времени и не сохраняются, что делает невозможным их дальнейший анализ.
Данная публикация посвящена программному решению задачи хранения информации от датчиков, работающих с Arduino и её графическому представлению в реальном масштабе времени. В примерах используются широко известными датчиками, такими как потенциометр и датчик движения PIR.
Использование CSV-файлов для хранения данных полученных от датчиков, работающих с Arduino
Для записи данных в CSVфайл можно использовать простой листинг:
import csv
data = [[1, 2, 3], ['a', 'b', 'c'], ['Python', 'Arduino', 'Programming']]
with open('example.csv', 'w') as f:
w = csv.writer (f)
for row in data:
w.writerow(row)
Некоторое время назад я писал о смешном методе-проверке «А не козёл ли ты, пользователь?». Сегодня обнаружил ещё один забавный метод для новенькой Android 8.0.
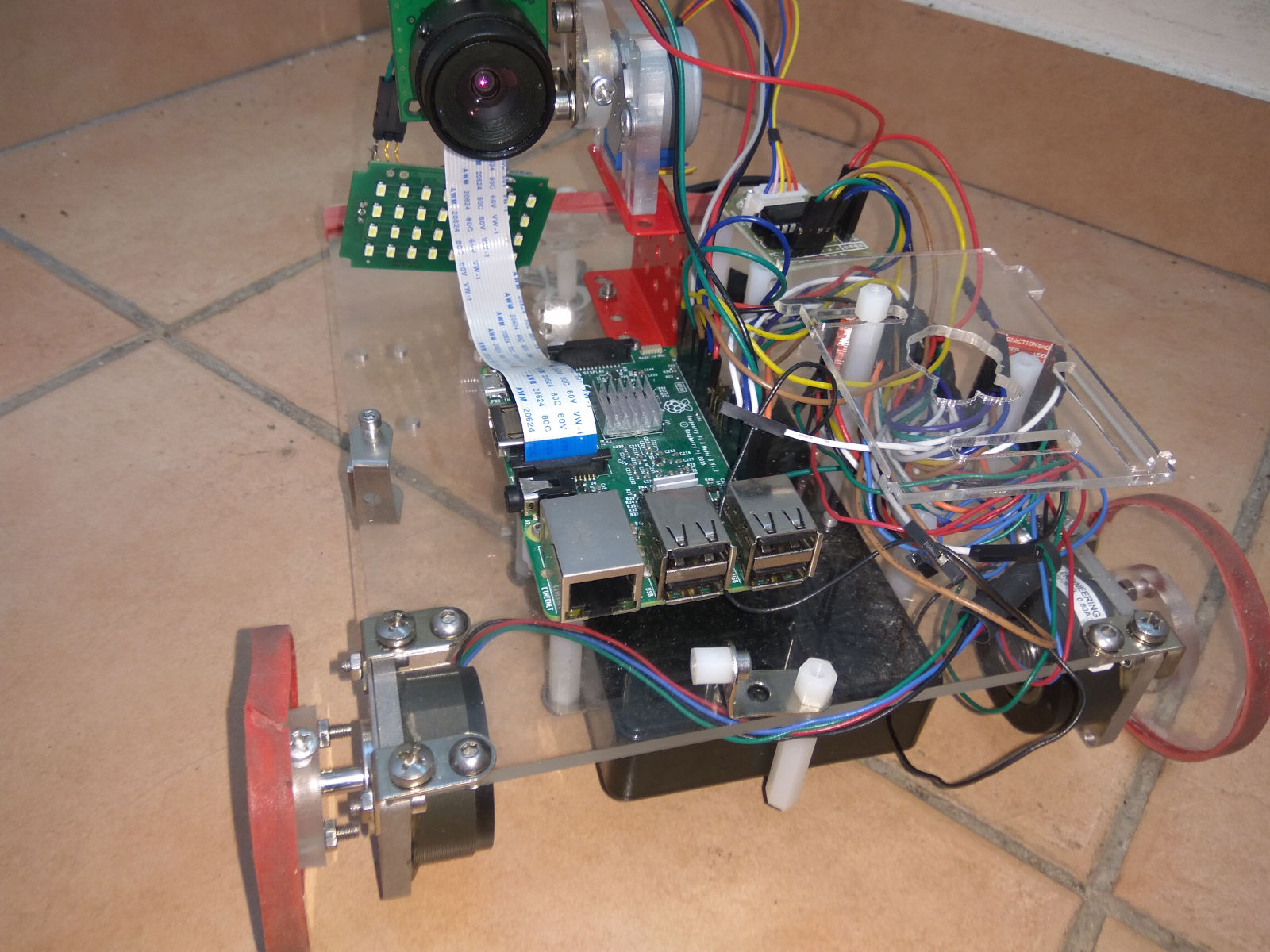
Дело было вечером… все статьи на Хабре были прочитаны, затеял «небольшой» проект по автономной ориентации робота на RaspberryPi 3. С железом проблем нет, собирается недорого из г-на и палок купленных на ебау деталек, камера с хорошей стеклянной оптикой (это важно для стабильности калибраций), привод камеры вверх, вниз и компас, гироскоп и тд прикрепленные к камере:
Существующие системы SLAM не устраивают, или по цене, или по качеству/скорости. Поскольку наработок деталей для Visual SLAM у меня много, решил шаг за шагом писать и выкладывать алгоритмы и код в открытый доступ, с обоснованием причин выбора тех или иных алгоритмов.
В прошлой части я рассказывал о подводных камнях Kotlin, в этой я расскажу что их перевешивает.
Меня несколько раз спрашивали, а что же такого в Kotlin, что могло бы сподвигнуть на переход с Java, в чем его фишка? Да, Kotlin привнес Null-safety и большое количество синтакcического сахара, закрыл часть слабых мест Java. Но это не становится поводом для перехода. Что может стать? Новые возможности и новая философия.
Краткое предисловие-пояснение ко второй части (кому не интересно под спойлером может не читать)
1. Учёл критику и пожелания читателей: цвет убрал, отформатировал и причесал, как смог. Строго не судите: как умею, так и выходит. Учусь и этот процесс будет (для меня) долог. Потерпите и не пинайте.