Comments 14
Многие делают пауков, но никто не пишет про ПО.
Ну вот собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки с правильным движением конечностей, но нигде нет статей как это все оживить.
Ну вот собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки с правильным движением конечностей, но нигде нет статей как это все оживить.
//нигде нет статей как это все оживить.
Мне кажется или вы сейчас посягнули на «святые скрижали» от Boston Dynamics?
//собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки
а дальше, ребенку (и его папе) будут интересна любая деятельность с игрушкой.
И это радует.
Увы «правильные» движения из фреймворков исключительно по «правильному» и «плоскому» полу, без проскальзований. Без «чувства» пола(микрик и интеррапт от него куда надо), «свободного» хода мотора(т.е.эффект «повисшей» лапы), моторы с «изменяемым» ускорением. Будут еще долго привелегией богатых лабораторий.
Мне кажется или вы сейчас посягнули на «святые скрижали» от Boston Dynamics?
//собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки
а дальше, ребенку (и его папе) будут интересна любая деятельность с игрушкой.
И это радует.
Увы «правильные» движения из фреймворков исключительно по «правильному» и «плоскому» полу, без проскальзований. Без «чувства» пола(микрик и интеррапт от него куда надо), «свободного» хода мотора(т.е.эффект «повисшей» лапы), моторы с «изменяемым» ускорением. Будут еще долго привелегией богатых лабораторий.
Нужна самообучающаяся нейросеть.
А какие есть фреймфорки и библиотеки для этого?
А скольку ушло пластика? Хочется повторить, хотелось бы прикинуть сколько будет стоить печать рамы
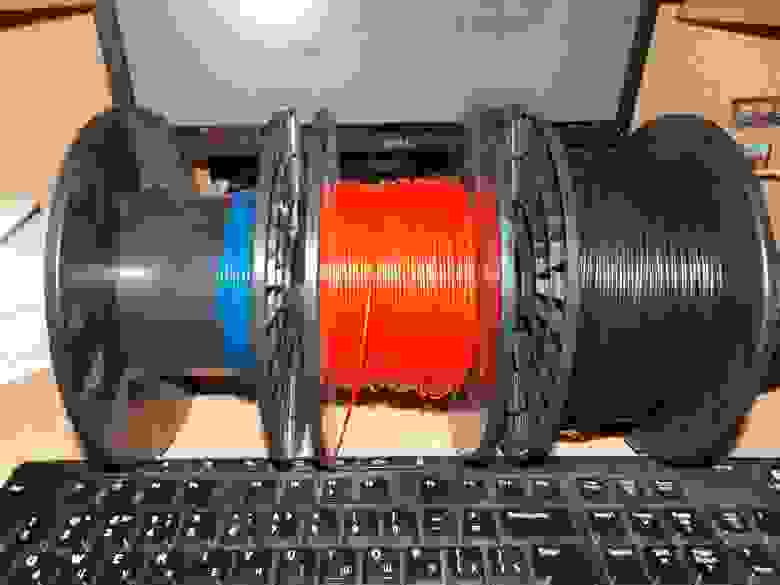
Как видно из фотографий в статье, печать осуществлялась пластиком трех цветов: синим, красным и черным. Прототип лапы и пробные образцы изготовлены из белого пластика, поэтому его можно не учитывать. Синего пластика ушло больше всего. Он лег в основу монолитных частей. Фактически на печать синим цветом ушла целая килограммовая катушка (примерно 1400 рублей). Красного пластика потрачено чуть больше половины, но из него еще планируем напечатать финишную крышку корпуса. Думаю после этого будет потрачена вся катушка. (то есть еще 1400 руб.) Чёрного пластика ушло меньше всего.

Буду рад, если моя первая и надеюсь не последняя публикация была кому-нибудь интересна и полезна.
Интересна! Спасибо!
Хороший паучок получился.
Вопросы. Зачем вам 6 стабилизаторов? Лучше же один, но мощный.
На сколько хватает аккумуляторов и какой вес может переносить паук?
И да, ждём вторую статью.
Вопросы. Зачем вам 6 стабилизаторов? Лучше же один, но мощный.
На сколько хватает аккумуляторов и какой вес может переносить паук?
И да, ждём вторую статью.
По поводу количества стабилизаторов отписал чуть ниже, но в целом могу сказать: так получилось. Сейчас робот может передвигаться вперед — назад, разворачиваться на месте. Но алгоритмы движения на мой взгляд еще требуют доработки. Сейчас планирую написать цикл статей по программной части, и есть опасение на правах начинающего автора описать «велосипед» )).
А зачем на каждую лапу по стабилизатору, да таких мощных? К тому же, это не стабилизаторы, а понижающие преобразователи dc-dc. Для электроники (ардуино и прочее) нужно 5 вольт, для сервоприводов примерно столько же. Вы могли бы использовать последовательно соединенные 2 банки аккумуляторов либо 2 последовательно и 2 в параллель. А сервоприводы запитать от одного dc-dc и какой-нибудь линейный стабилизатор для ардуино (не думаю что сервы будут "кушать" 9 ампер даже все вместе). При этом уменьшились бы вес и габариты. А в целом мне понравилось
Согласно даташиту на сервопривод mg996r: ток в удержании может достигать 2,5 А. Поэтому суммарно все 18 сервов не ограничивают себя потреблением тока в 9 А. И на мой взгляд логично было иметь некоторый запас прочности, чтобы преобразователи не работали на пределе своих заявленных возможностей. Поэтому было использовано 6 штук: по одному на каждую конечность. Не обладая опытом в самостоятельной разработке компонентов, были вынуждены использовать готовые, что привело к увеличению веса и габаритов.
По картинке похоже что за вертикальное перемещение лапы отвечает 2 моторчика, получается 2*6 = 12, а не 18. Ну и если для простого удержания веса модели нужна полная мощность всех 6 ног, как он двигаться-то будет? Сколько помню, простейший алгоритм движения — поочередное перемещение двух троек ног, значит нагрузка еще вдвое меньше.
Подскажите, сервы от какого производителя брали, tower pro или Китай нонейм?
Можно фото шестеренок сервы?
Хватает ли мощности Вашему пауку на данных сервах, Neoprog, вроде, сменил часть серв на более мощные.
Можно фото шестеренок сервы?
Хватает ли мощности Вашему пауку на данных сервах, Neoprog, вроде, сменил часть серв на более мощные.
Заказывал в Китае две партии, все НЕ оригиналы. Из первой партии уже вышло из строя шесть сервоприводов, из второй пока один. При разборе видно, что выгорают ключи. Скорее всего транзисторы не соответствуют заявленным параметрам, но не исключаю что сервоприводы попадают под повышенную нагрузку. Планирую приобрести оригинальную партию для дальнейшей для исключения первой версии. Кстати вычитал на форумах, что у оригинала метал не должен быть желтым.

Малиновая этикетка — первая партия, черная — вторая.

Выгоревший транзистор

Так должен выглядеть оригинал


Малиновая этикетка — первая партия, черная — вторая.

Выгоревший транзистор

Так должен выглядеть оригинал

Sign up to leave a comment.
Как мы печатали гексапода и что из этого получилось