Вы, наверное, не знаете как сильно я ценю Хабр. Это не просто сайт с релевантной информацией. Это сообщество людей, нетворкинг. В этом посте краткая история о том, как Habr исполняет мечты. Как за 6 месяцев из идеи можно сделать MVP, найти инвесторов и создать что-то новое. Пост о том, что не стоит бояться реализовывать идеи, не оставлять их пылиться до лучших времен. Под катом много фото с питча, с поездки в Доминикану, метаморфозы робота благодаря хабранетворкингу.
Возможно, наша история мотивирует Вас реализовать свои идеи, которые давно вынашивали, но не осмелились превратить в жизнь. Для этого в статье контакты инвест-фондов в РФ.
В гольфе есть driving range, это тренировочное поле для отработки дальних и средних ударов. В день на нем может оказаться до 20.000 мячей. Эти мячи нужно как-то собирать. Обычно для сбора используют спецтехнику, прикрепленную к автомобилю. Это расходы на персонал, обслуживание техники, повреждение мячей техникой, повреждение поля.
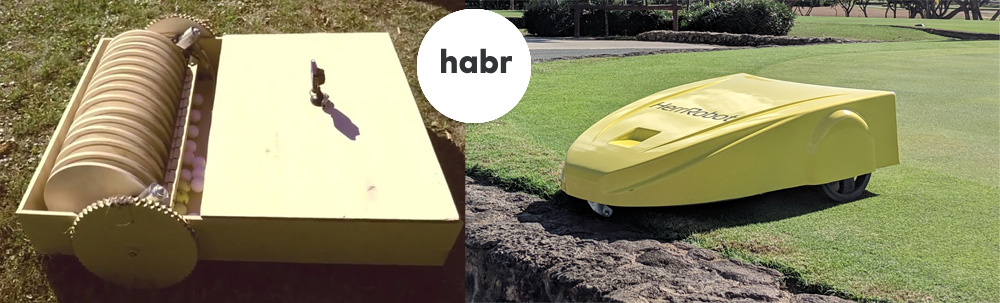
Летом 2018 года мой друг Майкл Викрент, учитель гольфа в Германии рассказал о боли администраторов гольф-клубов, а я нашёл решение в виде робота. Я собрал первый прототип из фанеры и написал об этом статью на сайте habr.com и получил широкий отклик. Сейчас, нас в команде уже 4 человека, профессионалов с опытом работы в мировых компаниях.
Основный посыл поста в том, что у Вас может быть все не идеально, важно действовать. Если бы я хранил бы свою идею, оберегал и лелеял из этого ничего бы не вышло. Я сделал первый вариант(очень далекий от идеала) и рассказал об этом. Это помогло найти единомышленников, с которыми, я надеюсь, мы останемся хорошими друзьями. Ниже фото нашего Московского тимбилдинга!

Далее по корпусу, механике, плате управления и ПО я хотел бы показать что было в начале и как это выглядит сейчас. Прогресс особенно заметен благодаря эффекту низкой базы.
Первый вариант корпуса был ужасен и кричал о том, что нам необходим человек, для решения этой задачи. Хабр помог найти такого человека. Сейчас корпус проектирует NikitaKhvoryk.
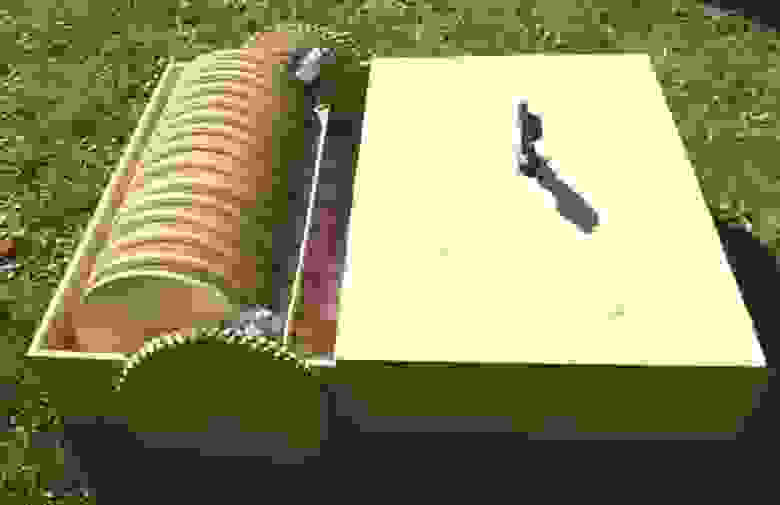
Первый вариант
Вариант из стеклоткани, для оценки габаритов
Вакуумная формовка

Текущий вариант с покраской и усилением стекловолокном.

Прогресс виден невооруженным глазом, и это все результат нетворкинга.
Нижняя часть коруса

Нижнюю часть корпуса для облегчения изготовления конструкции мы делаем из композитного материала и фрезеруем ее. В каждой итерации мы добавляем в корпус новые детали и отверстия, которые в предыдущей дорабатывали руками.

Для тестирования идеи подошло все, даже noname двигатели с али и напечатанные шестерни.

Конечно же для дальнейшего развития это все пришлось заменить, не спасла даже смена двигателя и печать шевронных шестеренок. Данный вариант привода не является конечным, сейчас ждем зубчатый ремень и шкивы, чтобы облегчить конструкцию.
Сначала было слово, потом макетная плата. На что похоже переплетение проводов? Правильно, колыбель для кошки.

Так выглядела первая компактная макетная плата.
Затем за дело взялся пользователь SkyserR. Он спроектировал и собрал плату подключения модулей для версии на raspberry pi.
Версия платы из Резонита
Версию с Ardupilot развивает Владимир Гончаров Shadow_ru. О ней можете почитать здесь.
Благодарим за предложенную помощь и советы Process0169, Trif, tersuren, vasimv, vovaekb90, r00mka, Вячеслава Солдатова, Левона Закаряна, Сергея Помазкина, Vladi Kuban, Karen Musaelyan, Алексея Платонова. Если Вы желаете помочь — просьба написать мне в ЛС или ВК, FB.
Изначально все ПО было самописное. Скрипты на Python и скетчи Arduino. Но, когда велосипедить устали перешли на Ardupilot и ROS.
У нас есть MVP и сейчас мы параллельно развиваем hardware и software часть. Мы используем opensource решения и пишем свой софт. У нас есть партнеры-подрядчики в России и Китае, которые поставляют нам комплектующие.
В октябре стало ясно, что данный проект можно превратить в коммерческий. Подали заявку в «Акселератор от Сбербанка и 500 Startups», но получили ответ о несоответствии инвестиционному фокусу. В целом им нужны были проекты Preseed стадии, под которую мы на тот момент не подходили. Затем заявка в «Конкурс грантов EXPO 2020 Dubai», от них мы не удостоились даже ответа. Подали заявку в Фонд содействия развитию малых форм предприятий (Фонд Бортника) на программу «Старт-1», ждем ответа.
Мы принимали участие в питч-сессии, рассказывали о своем проекте. Получили контакты 3 инвест-фондов и двух независимых инвесторов. Участие бесплатное, мероприятия постоянные. Очень рекомендую, позволяет найти инвесторов, подготовить Вашу презентацию, найти слабые места в проекте. Именно встреча с одним из фондов с мероприятия позволило получить первый оффер.
После мероприятия мы отправили в российский фонды презентацию проекта. Это позволило получить приглашение на вторую встречу и начать переговоры.
Так же хорошим вариантом является обращение к инвестору, который имеет в портфеле схожий проект ил инвестирует в данную тематику. Я использовал сайт rb.ru/company/?niche=119 и выбрал стартапы по робототехнике. Проанализировал кто в них инвестировал и отправил им презентацию. Такой метод подходит для первого касания. Не факт, что кто-то всерьез воспринимает такие email, но это существенно увеличивает базу контактов. Как ими воспользоваться решаете Вы сами.
Если у Вас есть опыт презентации проекта в США и Вы хотите нам помочь в этом — напишите мне в соц.сетях.
«Esto es un robot que collecta las bolas de golf» — говорил я, потому что не знаю как по-испански будет «Нет, это не электроовца», думаю для сеньора из солнечной и братской Гаити это звучало бы примерно одинаково.

Хаброюзер tersuren пригласил нас в Доминикану. Так мы получили возможность протестировать нашего робота зимой и не ждать до мая для отработки алгоритмов построения траектории по GPS. При этом сами тесты проходили в одном из лучших гольф-клубов мира. Мы сняли видео работы робота в гольф-клубе, что очень помогло при общении с инвесторами и демонстрации возможностей робота.
vasimv живет и работает в Доминикане над роботом-газонокосилкой. Учитывая перманентные посты в топе об эмиграции, если Вы занимаетесь ROS, робототехникой или электроникой, при этом давно задумываетесь о смене места жительства — напишите tersuren.

Полет с роботом это целая история. Кроме робота 1100*800*300 нужно было еще как-то провозить запасные части, личные вещи. В общем, ноутбук и аккумуляторы я взял в рюкзаке. А личные вещи, гостинцы из России, запасные двигатели, колесо, провода и т.д. разместил прямо в роботе, в отсеке для мячей. Вы бы видели удивленные лица сотрудников аэропорта и таможенной службы. Робот возили в сканере туда сюда по несколько раз. Закончилось в обоих случаях вопросом: Это вообще что? Учитывая, огромную надпись ХЕРРОБОТ на борту, мне казалось, вопросов не будет. И так, ведь, понятно!
Не обошлось без Epic-fail. Мы поспешили с заказом платы в резоните, поэтому один из контактов оказался перепутанным. Его перепаяли на соплях. Из-за влажности, драйвер на проводках работал через раз. Ни о каком тестировании алгоритмов при низкоуровневых проблемах речи быть не могло. «Сомы грамм и нету драм». Далее перешли на тесты версии на Beaglebone и Ardupilot.
Я, превозмогая жару, а Shadow_ru превозмогая холод с разницей в 7 часов из-за часовых поясов вводили срочные изменения в Ardupilot, чтобы заставить его работать в новых условиях. ESC, на смену сгоревшим, должны были подвезти из интернет-магазина за день до вылета из РФ, но не судьба. Имеющиеся контроллеры понимали ШИМ, а beaglebone упорно выдавал только частоту для серв. В итоге пришлось сделать мост из Arduino. Все делалось в торопях, но вдруг кому-то пригодится код.
Сейчас в мире всего один конкурент и он стоит $15.000. В мире 34.000 гольф-клубов, каждый тратит минимум 1.500$/месс на сбор мячей. Это рынок более $600M /год. Наша программа минимум это продажа и последующее обслуживание 1000 роботов. Даже при продаже по цене на 40% ниже конкурента это выручка около $8M.
У нас есть предварительная договоренность с гольф — клубами, заинтересованные в тесте робота на своем поле в Германии, Австралии, Новой Зеландии, Швеции и Доминиканской республике. И это всё благодаря Хабру.
Знаете, чем хорошо исполнять мечты и воплощать в жизнь свои идеи? Спокойствие. Просто закрываешь глаза и наслаждаешься моментом. Никакой Экхард Толле не расскажет Вам о силе момента, если Вы прокручиваете одни и те же мысли и они не дают Вам покоя. Вы дополняете деталями свой проект, но не начинаете делать. Забываете на время, а потом какой триггер снова вызывает образы идеи для проекта мечты. Вот именно это и есть повод начать делать. Не ждите идеального момента, идеальный момент сейчас!
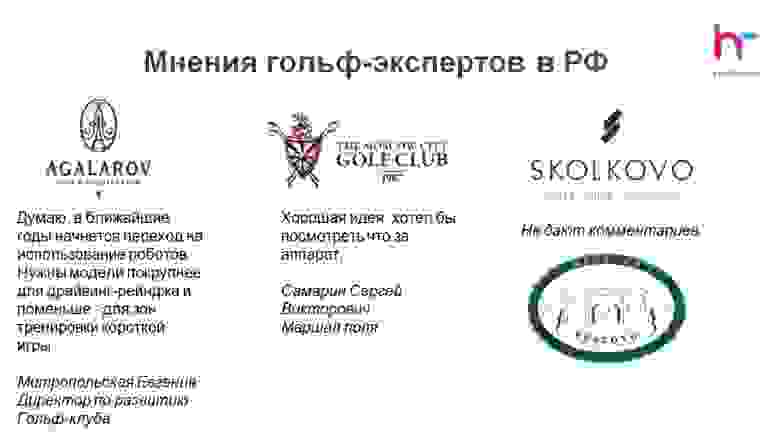
Нужен ли вообще такой робот? В России пока гольф не так сильно распространен, но мы обратились к экспертам отрасли, чтобы узнать их мнение. Все они сходятся во мнении, что данный робот необходим.
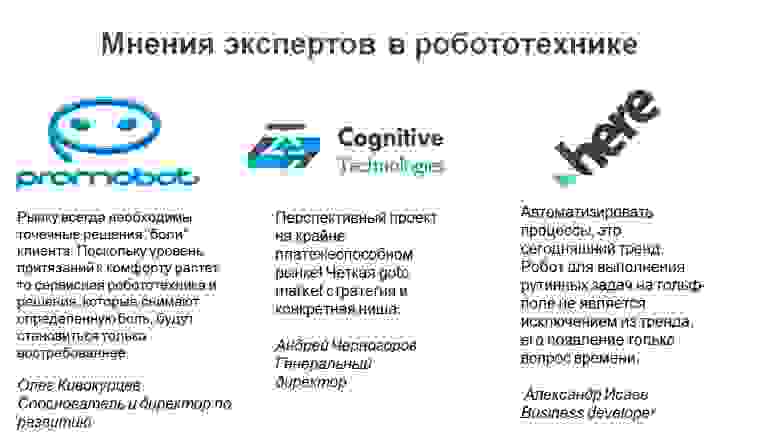
Мы обратились к лидерам рынка робототехники в России, чтобы узнать их мнение относительно сервисных роботов для решения рутинных задач. Это, бесспорно, тренд, с которым сложно спорить.
Мы будем дорабатывать и продвигать наш робот, потому что не можем не делать этого. Чтобы ускориться нам нужна Ваша помощь и поддержка!
На начало марта у нас запланирован еще один питч. Зачем, если уже есть оффер? Не знаю пока, идем как Сиддхартха, путь находит нас. За март нам нужно доработать все алгоритмы для полной работы и начать в апреле тесты на гольф-полях в РФ. В июне участие в выставке, публикация в европейских гольф-изданиях. За лето 2019 года мы должны сделать 25 роботов и начать тесты в Германии и Доминиканской республике. Осенью начать продажу as a service. А в 2020 году выйти на рынок США.
В 2020 году выпустить модель газонокосилки, работающей на том же алгоритме построения траектории для решения всех задач на driving range.
Вот такие нехитрые milestone, спасибо Вам за поддержку.
Наши посты:
P.S.: Этого робота не было бы, если бы не Habr.
Возможно, наша история мотивирует Вас реализовать свои идеи, которые давно вынашивали, но не осмелились превратить в жизнь. Для этого в статье контакты инвест-фондов в РФ.
В гольфе есть driving range, это тренировочное поле для отработки дальних и средних ударов. В день на нем может оказаться до 20.000 мячей. Эти мячи нужно как-то собирать. Обычно для сбора используют спецтехнику, прикрепленную к автомобилю. Это расходы на персонал, обслуживание техники, повреждение мячей техникой, повреждение поля.
Летом 2018 года мой друг Майкл Викрент, учитель гольфа в Германии рассказал о боли администраторов гольф-клубов, а я нашёл решение в виде робота. Я собрал первый прототип из фанеры и написал об этом статью на сайте habr.com и получил широкий отклик. Сейчас, нас в команде уже 4 человека, профессионалов с опытом работы в мировых компаниях.
Основный посыл поста в том, что у Вас может быть все не идеально, важно действовать. Если бы я хранил бы свою идею, оберегал и лелеял из этого ничего бы не вышло. Я сделал первый вариант(очень далекий от идеала) и рассказал об этом. Это помогло найти единомышленников, с которыми, я надеюсь, мы останемся хорошими друзьями. Ниже фото нашего Московского тимбилдинга!

Далее по корпусу, механике, плате управления и ПО я хотел бы показать что было в начале и как это выглядит сейчас. Прогресс особенно заметен благодаря эффекту низкой базы.
Корпус
Первый вариант корпуса был ужасен и кричал о том, что нам необходим человек, для решения этой задачи. Хабр помог найти такого человека. Сейчас корпус проектирует NikitaKhvoryk.
Первый вариант

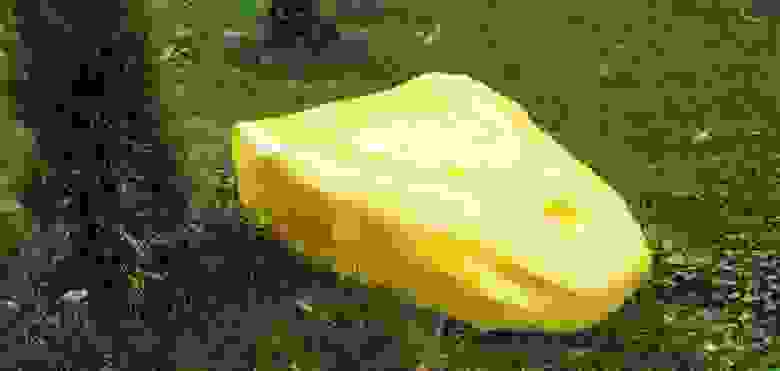
Вариант из стеклоткани, для оценки габаритов

Вакуумная формовка

Текущий вариант с покраской и усилением стекловолокном.

Прогресс виден невооруженным глазом, и это все результат нетворкинга.
Нижняя часть коруса

Нижнюю часть корпуса для облегчения изготовления конструкции мы делаем из композитного материала и фрезеруем ее. В каждой итерации мы добавляем в корпус новые детали и отверстия, которые в предыдущей дорабатывали руками.

Механика
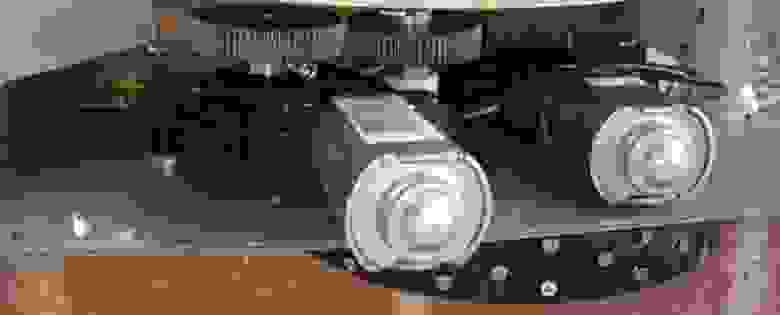
Для тестирования идеи подошло все, даже noname двигатели с али и напечатанные шестерни.

Конечно же для дальнейшего развития это все пришлось заменить, не спасла даже смена двигателя и печать шевронных шестеренок. Данный вариант привода не является конечным, сейчас ждем зубчатый ремень и шкивы, чтобы облегчить конструкцию.

Плата
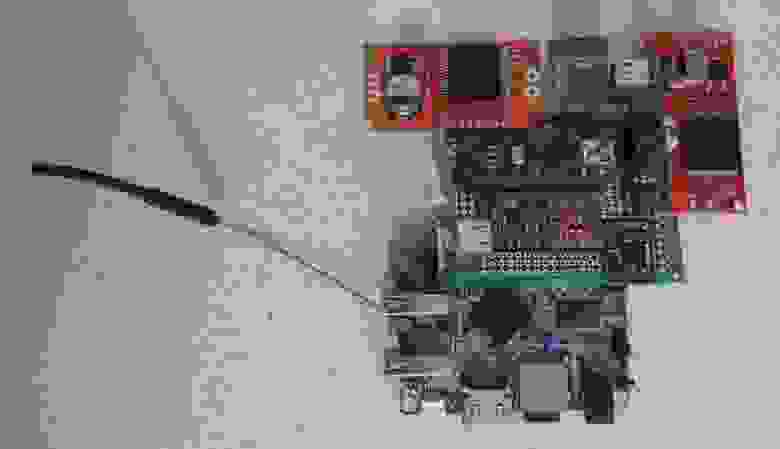
Сначала было слово, потом макетная плата. На что похоже переплетение проводов? Правильно, колыбель для кошки.
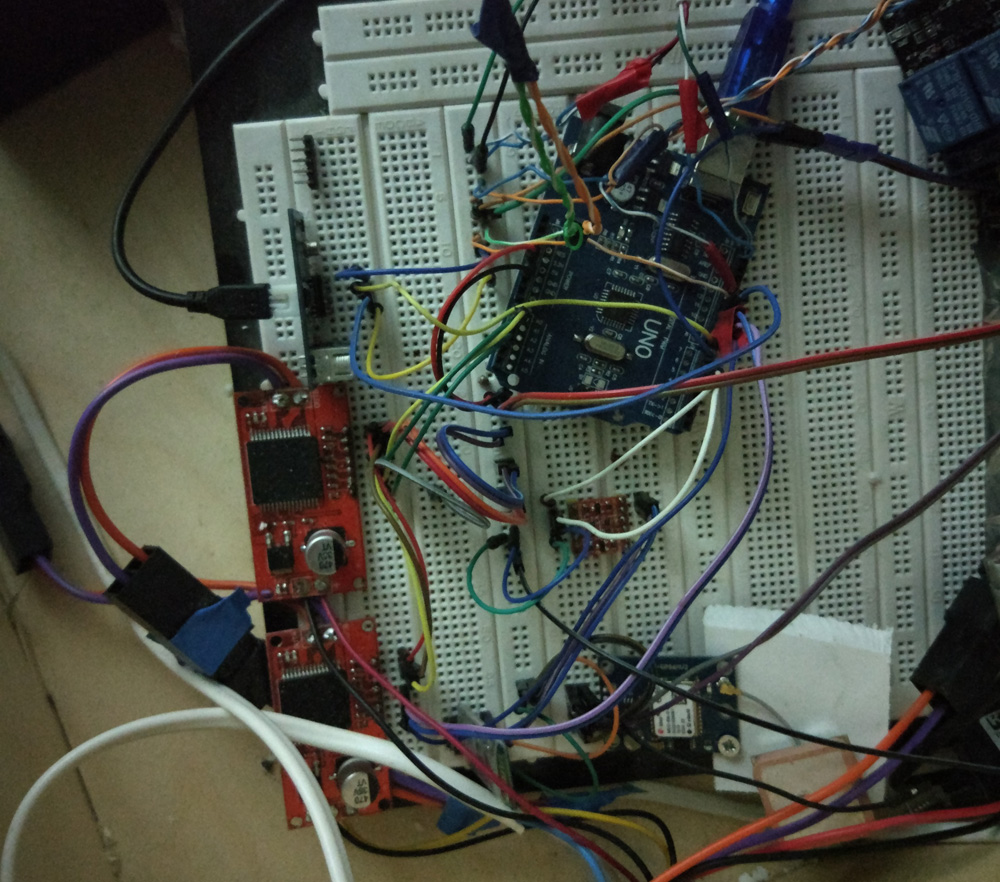
Так выглядела первая компактная макетная плата.

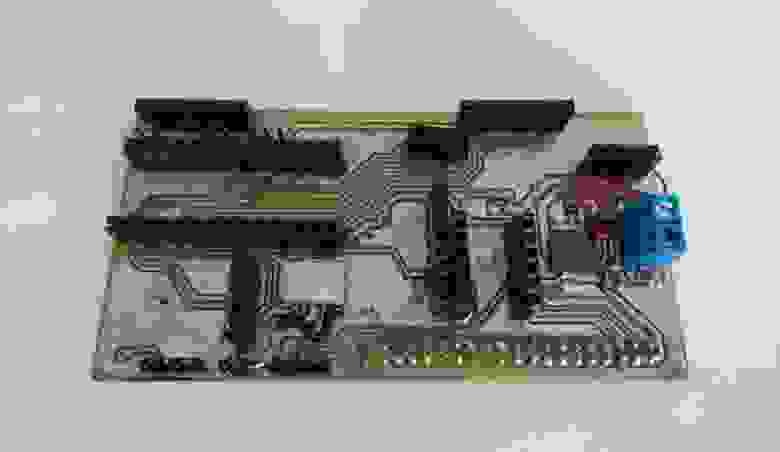
Затем за дело взялся пользователь SkyserR. Он спроектировал и собрал плату подключения модулей для версии на raspberry pi.
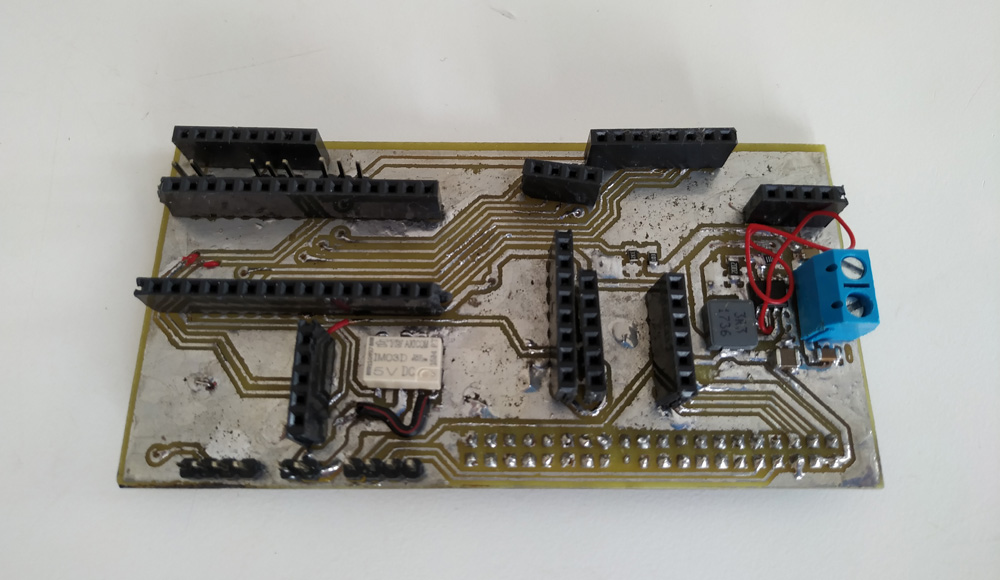
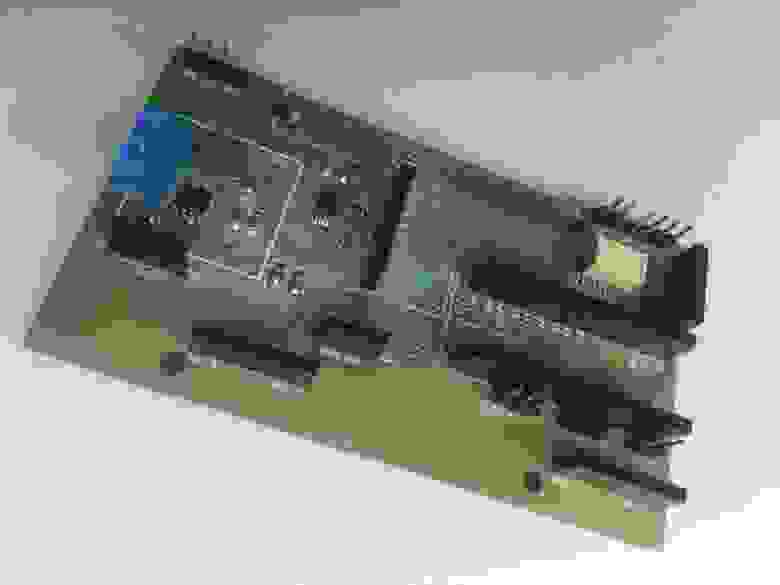
Версия платы из Резонита

Версию с Ardupilot развивает Владимир Гончаров Shadow_ru. О ней можете почитать здесь.
Благодарим за предложенную помощь и советы Process0169, Trif, tersuren, vasimv, vovaekb90, r00mka, Вячеслава Солдатова, Левона Закаряна, Сергея Помазкина, Vladi Kuban, Karen Musaelyan, Алексея Платонова. Если Вы желаете помочь — просьба написать мне в ЛС или ВК, FB.
ПО
Изначально все ПО было самописное. Скрипты на Python и скетчи Arduino. Но, когда велосипедить устали перешли на Ardupilot и ROS.
У нас есть MVP и сейчас мы параллельно развиваем hardware и software часть. Мы используем opensource решения и пишем свой софт. У нас есть партнеры-подрядчики в России и Китае, которые поставляют нам комплектующие.
Превращение из хобби эксперимента в продукт
В октябре стало ясно, что данный проект можно превратить в коммерческий. Подали заявку в «Акселератор от Сбербанка и 500 Startups», но получили ответ о несоответствии инвестиционному фокусу. В целом им нужны были проекты Preseed стадии, под которую мы на тот момент не подходили. Затем заявка в «Конкурс грантов EXPO 2020 Dubai», от них мы не удостоились даже ответа. Подали заявку в Фонд содействия развитию малых форм предприятий (Фонд Бортника) на программу «Старт-1», ждем ответа.
Выступление на мероприятии «Разведка Боем»

Мы принимали участие в питч-сессии, рассказывали о своем проекте. Получили контакты 3 инвест-фондов и двух независимых инвесторов. Участие бесплатное, мероприятия постоянные. Очень рекомендую, позволяет найти инвесторов, подготовить Вашу презентацию, найти слабые места в проекте. Именно встреча с одним из фондов с мероприятия позволило получить первый оффер.
Фото. Разведка Боем








После мероприятия мы отправили в российский фонды презентацию проекта. Это позволило получить приглашение на вторую встречу и начать переговоры.
Контакты фондов в РФ
| № | Наименование/ФИО | Контакты | Контактное лицо |
| 1 | ООО «Физтех Венчурз» — Phystech Ventures | http://phystechventures.com startup@phystechventures.com | |
| 2 | ООО «Брайт Капитал Менеджмент» | businessplan@bright-capital.com +7 (495) 989-85-40 |
|
| 3 | ООО «Прайм Груп» | www.primegroup.ru adanilenko@primegroup.ru +7 (499) 579-77-01 |
Даниленко Антон Борисович |
| 4 | ЗАО «РБ Капитал» | +7 (495) 726-59-17 |
|
| 5 | ООО «ПФ Капитал» | ventures@pf-cap.com | |
| 6 | Ковалев Дмитрий Владимирович | dimanyes@gmail.com | |
| 7 | Пшинник Кирилл Вадимович | kirill.pshinnik@gmail.com | |
| 8 | Лутц Игорь Рудольфович | igor@theuntitled.net | |
| 9 | Чучкевич Михаил Михайлович | 5024405@gmail.com | |
| 10 | Румянцев Александр | 3333626@gmail.com | |
| 11 | ООО «Кама Инвест Менеджмент» — KamaFlow | +7 (495) 532-68-32 |
Борисов Евгений |
| 12 | ООО «Инвестиционное Агентство Высота» | http://invest.theterritory.ru/ +7 (495) 134-19-90 |
Морозов Александр |
| 13 | ООО «Праймер Кэпитал» | +7 (499) 755-56-44 |
|
| 14 | Рябенький Игорь Аркадьевич | igor@altair.vc | |
| 15 | ЗАО «Софтлайн Интернейшнл» | +7 (495) 232-00-23 |
|
| 16 | ООО «Управляющая компания ЭйСиПи» | www.sciencepark.ru +7 (495) 930-84-54 |
Василий Петреченко |
| 17 | Starta Capital | +7 (495) 761-13-49 |
Сергей Васильев |
| 18 | Ковшаров Павел Александрович | pkovsharov@mail.ru | |
| 19 | Евсеенков Олег Владимирович | oleg@evseenkov.ru | |
| 20 | ООО «Импульс» | +7 (499) 702-36-72 |
Вадим Дьяков |
| 21 | ife.Sreda VC | http://sreda.vc/ info@lifesreda.ru |
Елена Кондрашкина |
| 22 | Add Venture III | max@addventure.to +7 (926) 339-82-50 |
Максим Медведев |
| 23 | Cloud4Auto Ventures | Bk@cloud4auto.com | Иннокентий Белоцкий |
| 24 | ООО «Биофонд РВК» | http://www.rvc.ru/investments/affiliated_funds/biofund/ info@rvcbio.ru +7 (495) 789-69-47 (доб. 114) |
Екатерина Рыжова |
| 25 | Яровой Богдан Витальевич | http://smarthub.ru/ olga@smarthub.ru; bogdan@smarthub.ru |
|
| 26 | Бородич Александр | |
Елена Привалова |
| 27 | Княгинин Дмитрий Валентинович | |
|
| 28 | Нахапетян Гор Борисович | gor@skolkovo.ru | |
| 29 | ООО «ФМФ Инвестиции» | +7 (916) 854 46 39 |
Андрей Яшунский |
| 30 | АТИ Глобал Инк. | http://northenergyventures.com/ru + 7 (499) 700-10-77 |
Наталия Наумова |
| 31 | ООО «Гурус Био Венче» | |
Игорь Тетерин |
| 32 | Синюшин Константин Станиславович | email: info@theuntitled.net + 7(495) 787-71-77 |
|
| 33 | Полевщиков Денис Витальевич | |
|
| 34 | ООО «Ом» | k.leonovich@ya.ru +7 (495) 799-24-66 |
Константин Леонович |
| 35 | Мартиросян Ваган Ишханович | |
|
| 36 | Глушенков Павел Александрович | Pavel.glushenkov@gmail.com +7 (499) 431-86-16 |
|
| 37 | Никитин Игорь Валериевич | inikitin@balrobotov.ru +7 (925) 514-88-17 |
|
| 38 | Нума Инвест | +7 (495) 268-08-86 |
|
| 39 | Вестер Елена | jelena.vester@gmail.com | |
| 40 | ООО «Инновационная Лаборатория» | info@innovationlab.ru +7 (495) 973-37-36 |
Ваган Мартиросян |
| 41 | BURAN VENTURE CAPITAL LTD. | +7 (495) 540-4842 |
Антон Федоров |
| 42 | ООО «Пульсар Экосистем» | http://pulsar.vc/ dmitry@pulsar.vc +7 (843) 227-40-28 |
Дмитрий Шапошников |
| 43 | ООО «Нанотехнологический центр «ТЕХНОСПАРК» | Более не инвестирует | |
| 44 | Волчков Александр Борисович | Volchkov@eastwaycapital.com +7 (925) 507-28-88 |
|
| 45 | Демидов Михаил Иванович | Michael@demidov.vc +7(499) 390-88-19 |
|
| 46 | ФРИИ | +7 (495) 258-88-77 |
|
| 47 | ООО «Тонап Венчур» | +7 (495) 612-24-59, +7 (495) 788-76-08 |
|
| 48 | Vesna Investment | http://vesnainvestment.com/ info@vesnainvestment.com | Павел Спесивцев |
| 49 | ООО «Венова» | http://venova.ru/ a.komarov@venova.ru +7 (926) 224-55-85 |
Александр Комаров |
| 50 | ООО РМГ партнеры | arseniy.dabbakh@rmg-partners.ru +7 (495) 668-13-00 |
Арсений Даббах |
| 51 | Черкашин Павел Александрович | pavel@cherkashin.ru + 7 (985) 222-61-41 |
|
| 52 | Грибов Сергей | sergey@sergey.com | |
| 53 | Аксенова Мария Дмитриевна | aksenova.md@gmail.com | |
| 54 | Давиденко Вячеслав Юрьевич | vd@alytics.ru | |
| 55 | Прудников Алексей Викторович | info@waardecapital.com +7 (495) 542-58-58 |
Даниил Пыжлаков |
| 56 | Фонд Prostor Capital | apavlyuk@prostor-capital.ru | Антонина Павлюк |
Так же хорошим вариантом является обращение к инвестору, который имеет в портфеле схожий проект ил инвестирует в данную тематику. Я использовал сайт rb.ru/company/?niche=119 и выбрал стартапы по робототехнике. Проанализировал кто в них инвестировал и отправил им презентацию. Такой метод подходит для первого касания. Не факт, что кто-то всерьез воспринимает такие email, но это существенно увеличивает базу контактов. Как ими воспользоваться решаете Вы сами.
Фонды в США, в которые мы готовим заявки.
- Y Combinator
- 500startups
- Plug and Play
- Techstars
- Seedcamp
- SOSV
- StartUpBootCamp
- Starta
Если у Вас есть опыт презентации проекта в США и Вы хотите нам помочь в этом — напишите мне в соц.сетях.
Поездка в Доминиканскую республику в феврале 2019
«Esto es un robot que collecta las bolas de golf» — говорил я, потому что не знаю как по-испански будет «Нет, это не электроовца», думаю для сеньора из солнечной и братской Гаити это звучало бы примерно одинаково.

Хаброюзер tersuren пригласил нас в Доминикану. Так мы получили возможность протестировать нашего робота зимой и не ждать до мая для отработки алгоритмов построения траектории по GPS. При этом сами тесты проходили в одном из лучших гольф-клубов мира. Мы сняли видео работы робота в гольф-клубе, что очень помогло при общении с инвесторами и демонстрации возможностей робота.
vasimv живет и работает в Доминикане над роботом-газонокосилкой. Учитывая перманентные посты в топе об эмиграции, если Вы занимаетесь ROS, робототехникой или электроникой, при этом давно задумываетесь о смене места жительства — напишите tersuren.

Полет с роботом это целая история. Кроме робота 1100*800*300 нужно было еще как-то провозить запасные части, личные вещи. В общем, ноутбук и аккумуляторы я взял в рюкзаке. А личные вещи, гостинцы из России, запасные двигатели, колесо, провода и т.д. разместил прямо в роботе, в отсеке для мячей. Вы бы видели удивленные лица сотрудников аэропорта и таможенной службы. Робот возили в сканере туда сюда по несколько раз. Закончилось в обоих случаях вопросом: Это вообще что? Учитывая, огромную надпись ХЕРРОБОТ на борту, мне казалось, вопросов не будет. И так, ведь, понятно!
Фото из Доминиканы




Не обошлось без Epic-fail. Мы поспешили с заказом платы в резоните, поэтому один из контактов оказался перепутанным. Его перепаяли на соплях. Из-за влажности, драйвер на проводках работал через раз. Ни о каком тестировании алгоритмов при низкоуровневых проблемах речи быть не могло. «Сомы грамм и нету драм». Далее перешли на тесты версии на Beaglebone и Ardupilot.
Я, превозмогая жару, а Shadow_ru превозмогая холод с разницей в 7 часов из-за часовых поясов вводили срочные изменения в Ardupilot, чтобы заставить его работать в новых условиях. ESC, на смену сгоревшим, должны были подвезти из интернет-магазина за день до вылета из РФ, но не судьба. Имеющиеся контроллеры понимали ШИМ, а beaglebone упорно выдавал только частоту для серв. В итоге пришлось сделать мост из Arduino. Все делалось в торопях, но вдруг кому-то пригодится код.
Скетч моста для превращения частоты в PWM
#include <math.h>
int ch0,ch1,pwm,pwm2;
void setup() {
//Declaring LED pin as output
pinMode(A1, INPUT);
pinMode(A0, INPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
}
void loop() {
ch1 =pulseIn(A1, HIGH);
if(ch1<1470){
pwm=(1500-ch1)/2;
analogWrite(7, pwm);
digitalWrite(6,LOW);
digitalWrite(5,HIGH);
}else if(ch1>1530){
pwm=(ch1-1500)/2;
analogWrite(7, pwm);
digitalWrite(6,HIGH);
digitalWrite(5,LOW);
}else{
pwm=0;
analogWrite(7, pwm);
digitalWrite(6,LOW);
digitalWrite(5,LOW);
}
ch0 =pulseIn(A0, HIGH);
if(ch0<1470){
pwm2=(1500-ch0)/2;
analogWrite(4, pwm2);
digitalWrite(3,LOW);
digitalWrite(2,HIGH);
}else if(ch0>1530){
pwm2=(ch0-1500)/2;
analogWrite(4, pwm2);
digitalWrite(3,HIGH);
digitalWrite(2,LOW);
}else{
pwm2=0;
digitalWrite(3,LOW);
digitalWrite(2,LOW);
}
Serial.print("ch0=");
Serial.println(ch0);
Serial.print("ch1=");
Serial.println(ch1);
Serial.print("pwm2=");
Serial.println(pwm2);
for(int i=0; i<255; i++){
delay(5);
}
}
Promo-видео после поездки
Видео с 3D-рендерингом до поездки
Сейчас в мире всего один конкурент и он стоит $15.000. В мире 34.000 гольф-клубов, каждый тратит минимум 1.500$/месс на сбор мячей. Это рынок более $600M /год. Наша программа минимум это продажа и последующее обслуживание 1000 роботов. Даже при продаже по цене на 40% ниже конкурента это выручка около $8M.
У нас есть предварительная договоренность с гольф — клубами, заинтересованные в тесте робота на своем поле в Германии, Австралии, Новой Зеландии, Швеции и Доминиканской республике. И это всё благодаря Хабру.
Знаете, чем хорошо исполнять мечты и воплощать в жизнь свои идеи? Спокойствие. Просто закрываешь глаза и наслаждаешься моментом. Никакой Экхард Толле не расскажет Вам о силе момента, если Вы прокручиваете одни и те же мысли и они не дают Вам покоя. Вы дополняете деталями свой проект, но не начинаете делать. Забываете на время, а потом какой триггер снова вызывает образы идеи для проекта мечты. Вот именно это и есть повод начать делать. Не ждите идеального момента, идеальный момент сейчас!

Нужен ли вообще такой робот? В России пока гольф не так сильно распространен, но мы обратились к экспертам отрасли, чтобы узнать их мнение. Все они сходятся во мнении, что данный робот необходим.


Мы обратились к лидерам рынка робототехники в России, чтобы узнать их мнение относительно сервисных роботов для решения рутинных задач. Это, бесспорно, тренд, с которым сложно спорить.

Мы будем дорабатывать и продвигать наш робот, потому что не можем не делать этого. Чтобы ускориться нам нужна Ваша помощь и поддержка!
Планы
На начало марта у нас запланирован еще один питч. Зачем, если уже есть оффер? Не знаю пока, идем как Сиддхартха, путь находит нас. За март нам нужно доработать все алгоритмы для полной работы и начать в апреле тесты на гольф-полях в РФ. В июне участие в выставке, публикация в европейских гольф-изданиях. За лето 2019 года мы должны сделать 25 роботов и начать тесты в Германии и Доминиканской республике. Осенью начать продажу as a service. А в 2020 году выйти на рынок США.
В 2020 году выпустить модель газонокосилки, работающей на том же алгоритме построения траектории для решения всех задач на driving range.
Вот такие нехитрые milestone, спасибо Вам за поддержку.
Наши посты:
- Разработка робота для сбора мячей для гольфа
- Попытка изготовления корпуса для робота при ограниченном бюджете. Стекломат и эпоксидная смола
- Проектирование сервисного робота. Постановка задачи, архитектура решения
- ArduPilot для новичков. Установка и настройка на BeagleBone Blue
- Изготовление корпуса для робота при ограниченном бюджете. Вакуумная формовка
- Навигация сервисного робота на поле для гольфа. Построение пути и обход препятствий
P.S.: Этого робота не было бы, если бы не Habr.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Какое название выбрать?
4.56% BallBot13
7.37% HarvyBot21
6.67% Ball Harvester19
14.04% Harvester40
18.95% GolfBot54
7.72% BallEater22
3.86% BallGrabber11
11.23% HerrRobot32
6.32% HerRobot18
0.7% driveRanger2
13.33% Pickmate38
5.26% Gacman15
Проголосовали 285 пользователей. Воздержались 48 пользователей.
