
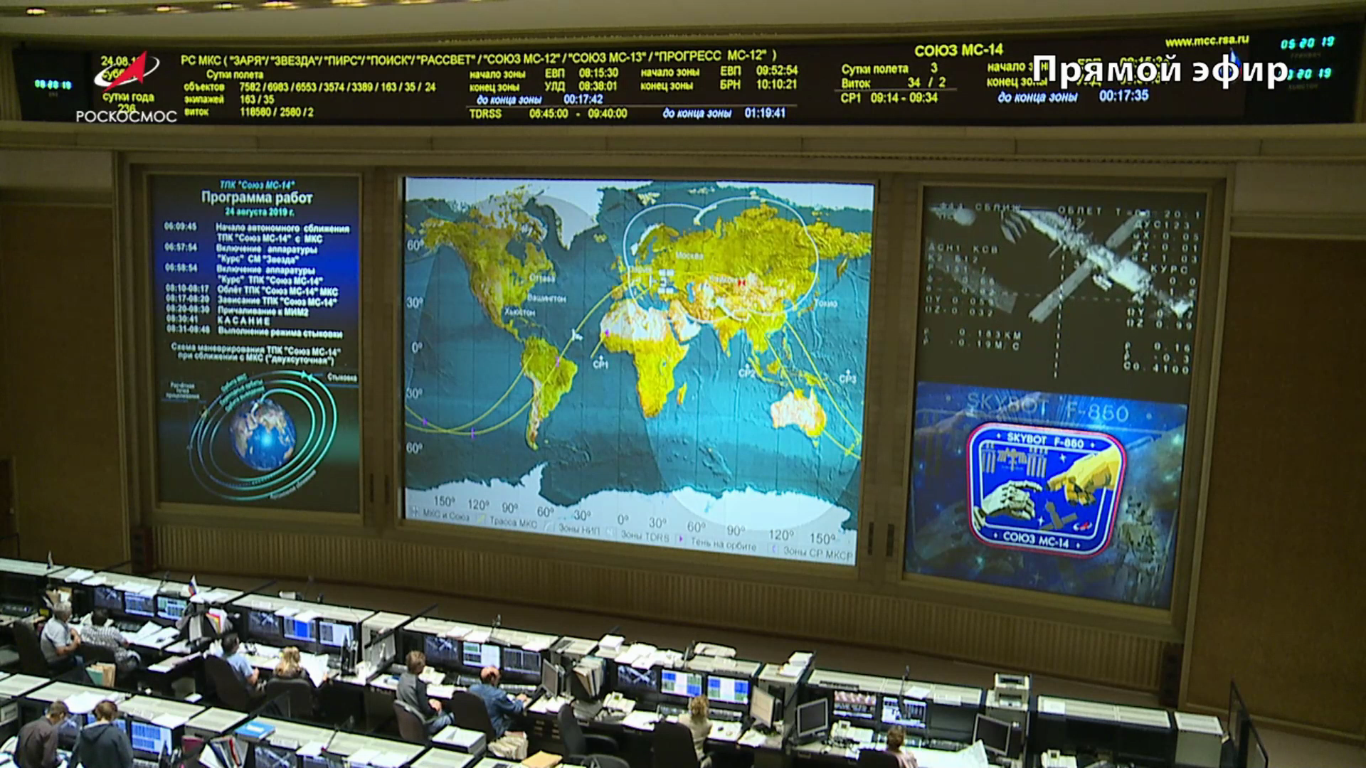
24 августа 2019 года в расчетный период времени 08:30-08:45 мск корабль «Союз МС-14» не смог осуществить процедуру стыковки с Международной космической станцией.
Сближение корабля «Союз МС-14» со станцией и попытка причаливания к исследовательскому модулю «Поиск» проводились в автоматическом режиме под контролем специалистов ЦУП и космонавтов Роскосмоса Алексея Овчинина и Александра Скворцова на борту МКС.
Повторная попытка стыковки «Союза МС-14» с МКС состоится не ранее 27 августа 2019 года, причем перед второй попыткой будет выполнена перестыковка корабля «Союз МС-13» в ручном режиме, чтобы «Союз МС-14» мог попробовал пристыковаться до служебного модуля «Звезда».
26 августа 2019 года корабль «Союз МС-13» в ручном режиме экипаж успешно перестыковал к модулю «Поиск».
Продолжение этой публикации: "Успешно запущен на орбиту корабль «Союз МС-14» с роботом FEDOR (Skybot F-850)".
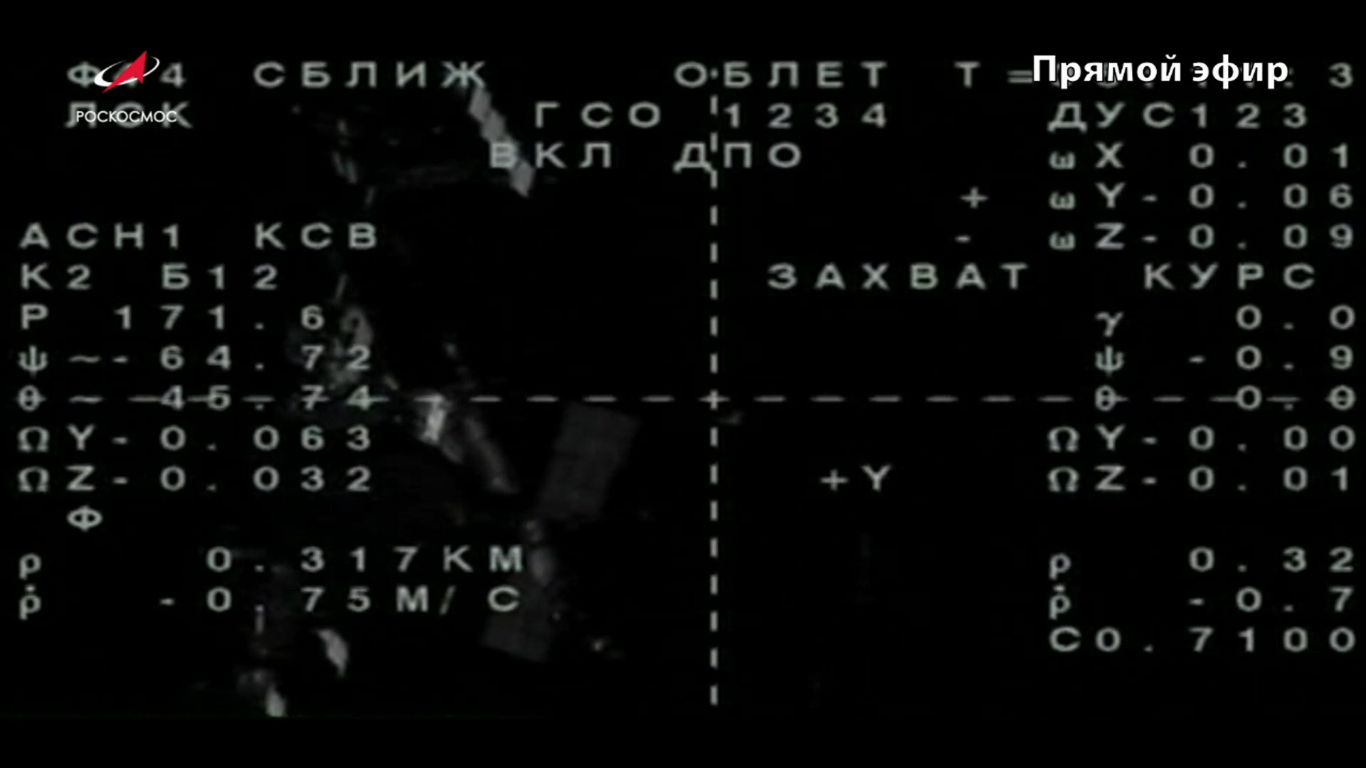
Транспортный пилотируемый корабль (ТПК) «Союз МС-14», который должен был пристыковаться к Международной космической станции в 08:30 по Москве, не смог этого сделать в запланированное время, как сообщили из Центра управления полетами.
Стыковка должна была состояться в 08:30, однако, к этому времени корабль «Союз МС-14» находился в 100 метрах от станции.
Стыковка должна была пройти в автоматическом режиме, «Союз МС-14» приблизился к МКС, совершил облет станции и встал напротив причального модуля, однако, затем на трансляции было видно, что системе автоматической стыковки «Курс» не удалось стабилизировать корабль и начать сближение со станцией. После этого корабль с дистанции 96 метров начал отходить от станции, после чего трансляция прекратилась.


«Со сближением все было нормально, примерно до дальности 200 метров, а дальше у нас пошли определенные, ранее не встречавшиеся колебания, на этапе причаливания мы поняли, что в автоматическом режиме состыковать не удастся,» — заявил руководитель полетом российского сегмента МКС Владимир Соловьев.
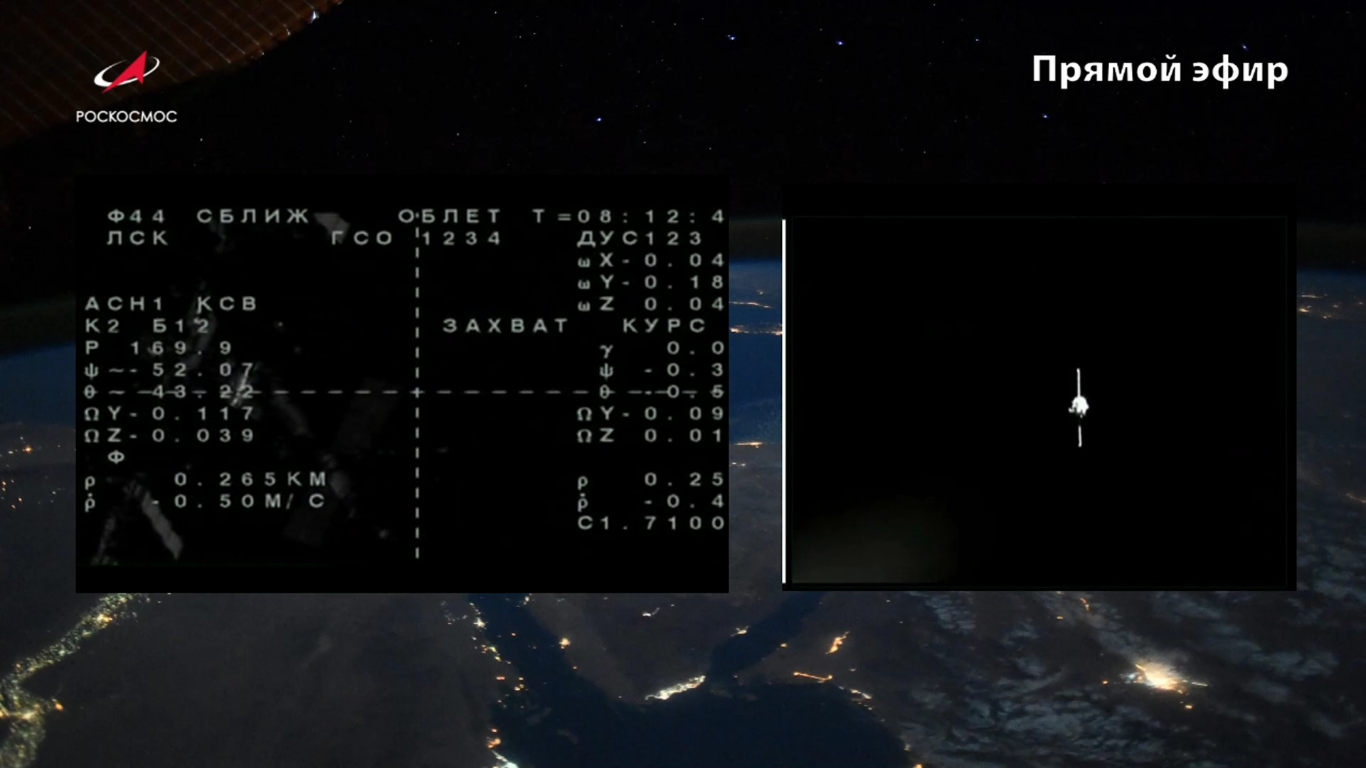
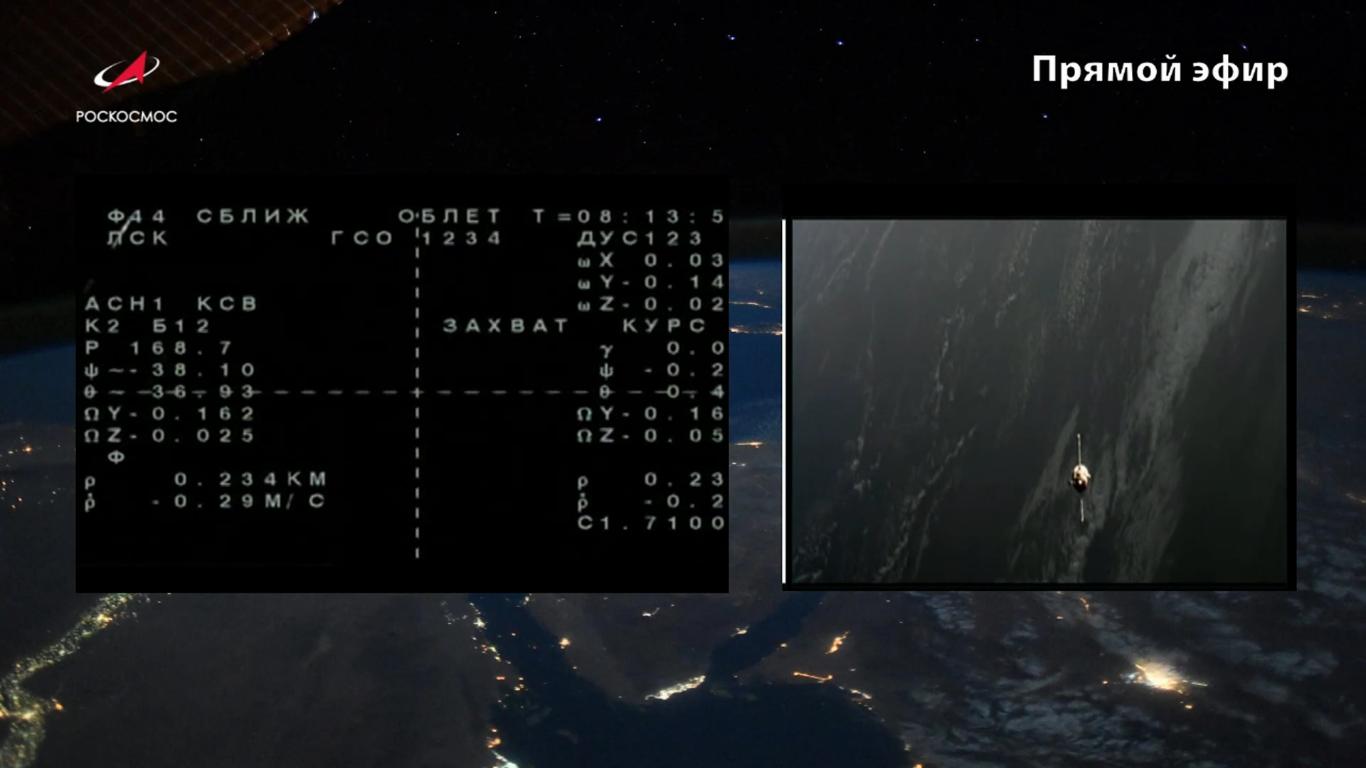
По состоянию на 08:37 по Москве, корабль «Союз МС-14» отошел от станции на 150 метров.
На данный момент корабль «Союз МС-14» отведен на безопасное расстояние от МКС примерно на 300 метров.
Специалисты ЦУПа пытаются устранить проблему и оценивают возможность новой попытки стыковки и время ее проведения.
Причиной нештатной ситуации могла стать неполадка в системе автоматической стыковки корабля «Курс», которая не смогла стабилизировать корабль перед началом его сближения со станцией для стыковки".
При причаливании «Союза МС-14» к станции на дальности 100 метров, возможно, произошел отказ одного полукомплекта системы сближения «Курс-НА» на корабле, он был автоматически переключен на второй, но и тут возникли проблемы с усилителем системы «Курс» на борту самой станции, после чего ЦУП дал команду на увод корабля от станции.
Таким образом, стыковка была отменена из-за проблем системы стыковки на борту станции и теперь необходимо провести работы по замене оборудования на МКС, чтобы была возможность повторить попытку стыковки в ночь с воскресенья на понедельник.
В ЦУПе в скором времени передадут космонавтам инструкции по замене усилителя системы стыковки на борту МКС.
«Курс» — это радиотехническая система взаимных измерений параметров движения для поиска, сближения и стыковки космических аппаратов с орбитальной станцией. Она используется с 1986 года. Система состоит из аппаратуры «активного» корабля, который осуществляет все необходимые маневры, и аппаратуры «пассивного» корабля (орбитальной станции), положение которого не управляется системой «Курс».
Заседание государственной комиссии в зале переговоров ЦУПа началось сразу после того, как транспортный пилотируемый корабль (ТПК) «Союз МС-14» не смог состыковаться с Международной космической станцией (МКС), госкомиссия должна установить причины произошедшего и принять решение о дальнейших действиях.
Среди участников заседания — гендиректор Ракетно-космической корпорации «Энергия» Николай Севастьянов, начальник Центра подготовки космонавтов Павел Власов, директор ЦУПа Максим Матюшин, начальник головного научного института Роскосмоса ЦНИИмаш Сергей Коблов.
Специалисты в ЦУПе решили не проводить повторную попытку стыковки «Союза МС-14» в течение субботы. Стыковка планируется на резервную дату. Безопасности станции и экипажа ничего не угрожает.
По расчетам баллистиков, в течение дня корабль будет находиться на безопасном расстоянии от станции, поэтому в субботу повторная стыковка проводиться не будет.
Повторная попытка стыковки «Союза МС-14» с МКС состоится не ранее понедельника-вторника, по сообщению NASA.
Официальное сообщение от руководства полетом:
«Вся аппаратура транспортного корабля „Союз МС-14“ исправна, он находится в ожидании новой попытки стыковки,» — заявил первый заместитель генерального конструктора РКК «Энергия», руководитель полета российского сегмента МКС Владимир Соловьев.
«Корабль „Союз МС-14“ находится сейчас в автоматическом полете, вся аппаратура абсолютно работоспособна. Мы провели построение орбитальной ориентации, закрутку, и сейчас корабль находится в своеобразном режиме хранения на орбите», — сказал Соловьев.
Следующую попытку пристыковать «Союз МС-14» к МКС предпримут утром в понедельник.
«Нам пришлось на безопасной дальности обеспечить расхождение, и ближайший анализ телеметрии показал, что у нас есть исправимые замечания на аппаратуре, которая обеспечивает ближнюю часть стыковки. Сейчас разрабатывается программа действий, которая позволит заменить часть блоков на МКС», — пояснил Соловьев.
«У нас хороший подготовленный экипаж, мы поговорили с ними, они понимают, что делать. Мы обязательно устроим проверку, а в планах на утро понедельника в районе 8-9 утра обеспечить повторную стыковку», — добавил руководитель полета российского сегмента МКС.
Что еще необходимо сделать на МКС для процедуры повторной стыковки «Союз МС-14»?
Центр управления полетами (ЦУП) считает, что для стыковки «Союза МС-14» к МКС нужна… перестыковка корабля «Союз МС-13». Корабль «Союз МС-13» россиянин Александр Скворцов, итальянец Лука Пармитано и американец Эндрю Морган перестыкуют к модулю «Поиск» в ночь на понедельник.
«Довольно много было разных комбинаций прорабатываем, склоняемся к тому, что надо организовать перестыковку „Союза МС-13“, который на агрегатном отсеке, к этому МИМ-2 (малый исследовательский модуль „Поиск“) в ручном режиме, там условия освещенности вроде нормальные», — сказал Соловьев.
Сейчас «Союз МС-13» пристыкован к узлу служебного модуля «Звезда». Соловьев подчеркнул, что к агрегатному отсеку кораблю «Союз МС-14» с роботом «Федором» на борту проще стыковаться, поскольку там «больше возможностей для контроля, особенно на ближнем участке».

Обновлено на 26 августа:

Также в Роскосмосе не рассматривают вариант затопления корабля «Союз МС-14» в океане, его системы работоспособны для штатной посадки на Землю.
На данный момент вот такое принято решение по подготовке ко второй попытке стыковки с МКС:
- в понедельник 26 августа 2019 года экипаж командира Александра Скворцова произведет в ручном режиме перестыковку корабля «Союз МС-13» со стыковочного узла, находящего на агрегатном отсеке модуля «Звезда», на стыковочный узел модуля МИМ2 («Поиск»), куда ранее не смог пристыковаться в автоматическом режиме «МС-14»;
- неисправный усилитель сигнала системы сближения «Курс» в модуле «Поиск», приведший в субботу к отбою стыковки корабля «Союз МС-14» со станцией, будет заменен экипажем станции после 27 августа 2019 года;
- повторная попытка стыковки «Союза МС-14» с МКС состоится не ранее 27 августа 2019 года к стыковочному узлу, находящемуся на агрегатном отсеке модуля «Звезда».






Программой полета была предусмотрена двухсуточная схема сближения транспортного корабля с Международной космической станцией.

Это был первый более чем за 30 лет пуск пилотируемого корабля без экипажа. Последний раз это был тестовый «Союз ТМ» в мае 1986 года.
Полет корабля «Союз МС-14» проходил в беспилотном режиме, что позволило в несколько раз увеличить полезную нагрузку за счет отсутствия части приборов и агрегатов, необходимых для обеспечения работы экипажа.
Беспилотный корабль «Союз МС» — не новая модификация пилотируемого корабля. От обычного серийного корабля этот вариант «Союза МС» отличает модернизированная система управления движением и навигации (СУДН) и соответствующая доработка отдельных бортовых систем.
На данный момент робот FEDOR (Skybot F-850) стал официально космонавтом, так как он выполнил следующие условия:
- поднялся над Землей выше 100 км;
- совершил полный виток вокруг Земли.
Кстати, в США астронавтами считают всех, кто поднялся над Землей выше 50 миль (80 км), а по нормам Международной авиационной федерации FAI граница космоса чуть выше 100 км, в России космонавтом официально признают того, кто совершил полный виток вокруг Земли.
Робот Федор или FEDOR (Final Experimental Demonstration Object Research) — антропоморфный робот, который разработан НПО «Андроидная техника» и Фондом перспективных исследований (ФПИ), и должен заменить человека в местах повышенного риска, а сейчас одна из его модификаций находится в космосе на орбите Земли на пути к МКС.
Характеристики робота FEDOR:
- рост почти 190 см;
- вес до 160 кг (в зависимости от используемых модулей);
- мощность до 13,5 кВт (20 лошадиных сил), АКБ — внешняя типа ранец или питание по кабелю;
- состоит из 15 тысяч деталей;
- программное обеспечение: операционная система реального времени, разработанная в Санкт-Петербурге на базе Linux, управляющее ПО на C++, C# и Python;
- работа в автономном режиме до 1 часа;
- оснащен двумя камерами, тепловизором, микрофоном, GPS, ГЛОНАСС, 15-ю лазерами дальномерного типа и специальной системой для определения положения своего тела;
- видеоканалы стереоскопической системы технического зрения робота могут работать как совместно, так и раздельно (совместная работа каналов позволяет определять расстояние до объектов, а раздельная — решать не менее двух функциональных задач одновременно, например, выполнять рабочие действия двумя разными инструментами одновременно);
- режимы работы: автономный, копирующий (в точности повторяет действия оператора);
- механика робота позволяет воспроизвести практически любые движения человеческого тела, а программное обеспечение, включая пополняемые библиотеки, позволяет расширять профессиональные навыки робота.
Космическая версия робота FEDOR в отличии от гражданской претерпела доработки:
- уменьшен вес робота;
- доработан плечевой пояс (чтобы увеличить зазор по диаметру люка, который был шесть-семь сантиметров и в тестах оказалось, что неудобно его извлекать);
- заменена штатная аккумуляторная батарея, чтобы соответствовать требованиям безопасности космических полетов;
- установлены новые приводы;
- конструкция робота проверена на вибростенде.
На официальном сайте государственной корпорации по космической деятельности «Роскосмос» выложили в открытый доступ 42 фотографии робота FEDOR в высоком качестве.

На этих фотографиях робот FEDOR (Skybot F-850) запечатлен на Байконуре в монтажно-испытательном корпусе «Энергия», где специалисты РКК «Энергия» проводили доработку и тестирование его систем.
Качество фотографий настолько хорошее, что можно рассмотреть надписи на шильдиках робота FEDOR и почти каждый винтик.

Видно, какие кабели и в какие разъемы подключаются для его электропитания и управления.


Правда, разъемы не дублированы, судя по фото, и если сломаются или повредятся, то может возникнуть проблема с использованием робота FEDOR далее.


Эмблема миссии робота FEDOR (Skybot F-850) на МКС создана по мотивам фрески Микеланджело «Сотворение Адама».

На эмблеме изображены кисти рук робота и человека в скафандре, тянущиеся друг к другу на фоне космоса. Рядом показаны корабль «Союз» и Международная космическая станция. Эмблема подписана сверху и снизу, соответственно, Skybot F-850 и «Союз МС-14».
Обновление от 26 августа 2019 года.
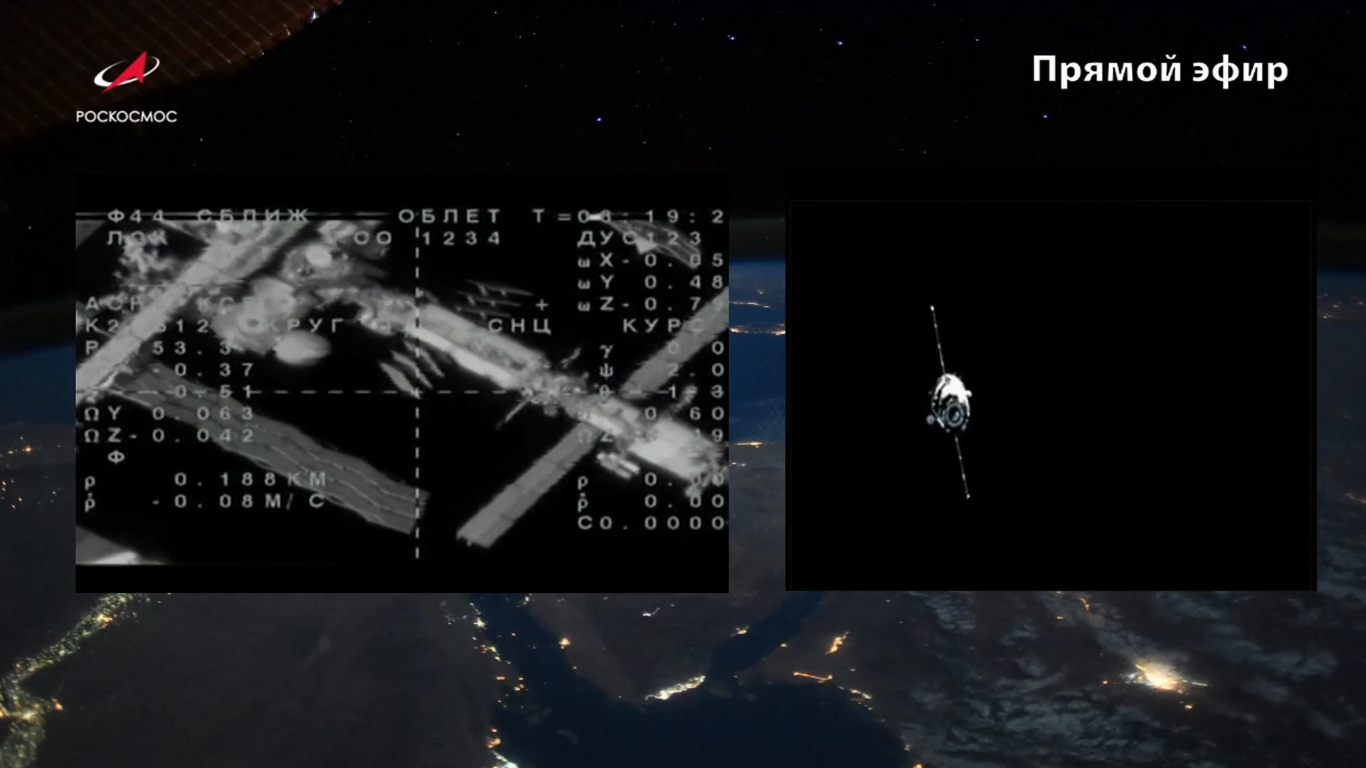
Пилотируемый корабль «Союз МС-13» 26 августа был успешно перестыкован со служебного модуля «Звезда» на малый исследовательский модуль «Поиск» российского сегмента Международной космической станции.
За несколько часов до этого экипаж в составе космонавта Александра Скворцова, астронавтов Луки Пармитано и Эндрю Моргана перешёл в корабль и закрыл переходные люки. После проверки герметичности стыка и проведения необходимых подготовительных операций экипаж приготовился к расстыковке.
В 06:35 мск корабль «Союз МС-13» отделился от Международной космической станции и затем отошёл от неё. Совершив облёт станции, в 06:59 мск в штатном режиме причалил к модулю «Поиск». Все операции выполнял его командир, космонавт Роскосмоса Александр Скворцов с использованием системы ручного управления.
Освободившийся на агрегатном отсеке модуля «Звезда» причал должен занять космический корабль «Союз МС-14», стыковка которого запланирована на 27 августа 2019 года в 06:12 мск. Напомним, его испытательный запуск в беспилотном варианте состоялся 22 августа 2019 года, а стыковка с МКС в автоматическом режиме по техническим причинам не состоялась.









Российский космонавт Александр Скворцов, выполнявший в ручном режиме перестыковку корабля «Союз МС-13» с одного модуля МКС на другой, использовал минимально возможное количество топлива, сообщил руководитель полета российского сегмента Международной космической станции Владимир Соловьев.
В 07:30 по московскому времени на корабле «Союз МС-14» с роботом FEDOR будет проведен двухимпульсный маневр с целью выстраивания оптимальной траектории полёта при стыковке корабля с МКС, которая намечена на утро вторника 27 августа.









