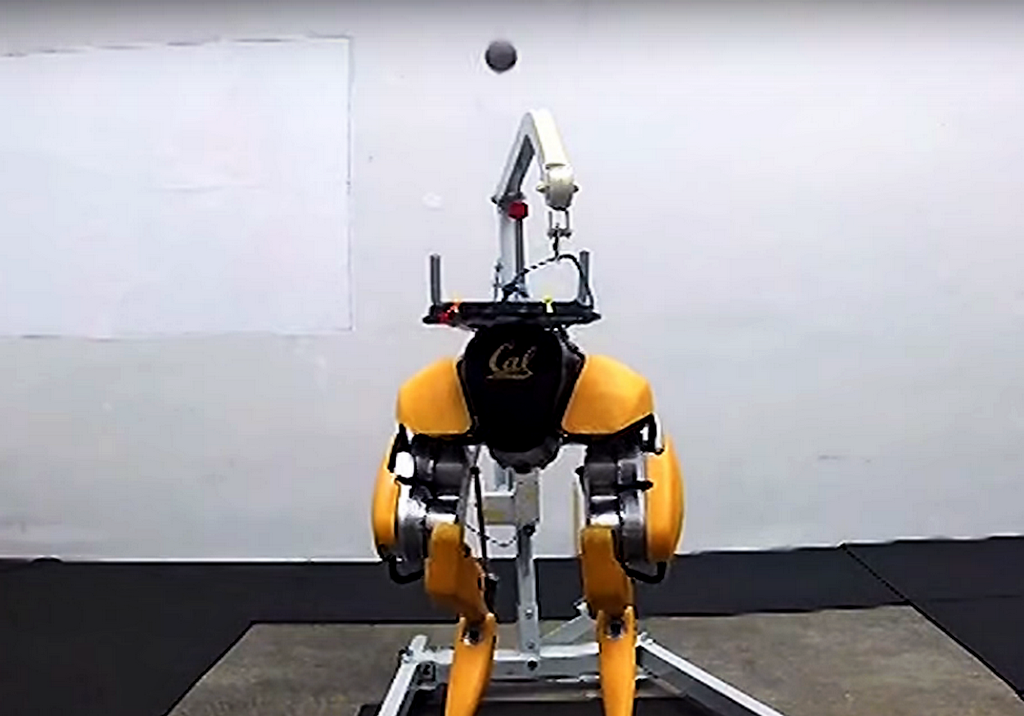
Двуногого робота Cassie Cal из Калифорнийского университета в Беркли научили жонглировать. Идея эксперимента состоит в том, что, если робот сможет манипулировать балансировкой, он будет лучше выполнять и другие действия, требующие динамической многозадачности.
Жонглированию Cassie помогает внешняя система захвата движения, которая отслеживает местоположение мяча. Робот может манипулировать мячом, наклоняясь вперед и назад, влево и вправо и двигаясь вверх и вниз. Она делает это, сохраняя баланс, то есть успешно реализует два динамических действия, которые иногда могут вступать в противоречие друг с другом.
Данную работу провела лаборатория гибридной робототехники Калифорнийского университета.
Один из участников исследования, ученый Альберт Ли, отметил, что при жонглировании выявлен ряд проблем. Так, цикл жонглирования мог закончиться из-за того, что мяч проскальзывал по краю площадки. Кроме того, ноги Cassie могли начать скользить, а сам робот терял устойчивое положение. В итоге это приводило к неудачным манипуляциям.
Ученые хотят посвятить будущую работу попытке научить робота жонглировать на ходу.
Летом исследователи смогли поставить Cassie на ролики. Робот научился перемещаться на электрических роликовых коньках, имеющих одно колесо. Система управления Cassie наклоняла его корпус в разные стороны для ускорения, торможения или изменения направления движения. Технология Intel RealSense позволила Cassie действовать самостоятельно и перемещаться по университетскому городку. Однако у робота возникли проблемы при подъеме по лестнице. Специалисты занялись разработкой системы высокоскоростных обратных связей, которая позволит преодолеть затруднение и передвигаться в сложной городской среде. Кроме того, робот не мог развернуться на месте. При этом Cassie лучше, чем человек, справился с ездой
по сложной и неровной поверхности.
На днях японские изобретатели представили робота, способного взбираться по вертикальным лестницам, распознавая поручни и другие элементы, а также карабкаться и по некоторым другим вертикальным поверхностям. Робот имеет четыре манипулятора и оснащен несложными захватами, которые помогают удержаться при попытке подняться по вертикальной лестнице. У каждого из манипулятора-«ноги» пять степеней свободы. Они оснащены датчиками давления, силы и касания.
