
Фото с бортовой камеры «Индженьюити» во время полета №26. Источник фото: НАСА.
НАСА сообщило, что «Индженьюити» 19 апреля совершил полет №26. Аппарат преодолел дистанцию в 360 метров, летел на высоте 8 метров со скоростью 3.8 м/c, провел в атмосфере 159 секунд. Вертолет приземлился на западе от места взлета на новом и восемнадцатом по счету посадочном месте (Airfield R) за все время своего пребывания на Марсе.
Неделю назад «Индженьюити» совершил полет №25 на рекордную дальность — 704 метра.
В настоящее время марсоход «Персеверанс» выполняет свою основную научную миссию, собирая образцы марсианского грунта, и находится на удалении нескольких сот метров от «Индженьюити» в устье кратера Езеро, представляющее собой веерообразную дельту высохшей реки. Вертолет долетел туда прямиком через безопасные промежуточные места посадки, которые он выбирал с помощью специального программного алгоритма НАСА.
Согласно текущей статистике, «Индженьюити» пробыл в рабочем режиме на Марсе в более чем 11 раз дольше расчетного времени: 416 солов (марсианских суток), как и марсоход «Персеверанс», но 351 сол на поверхности планеты — автономно. Вертолет был спроектирован на 30 суток работы в условиях Марса после высадки с марсохода. Оказалось, что его возможности позволяют летать и дольше. НАСА в августе 2021 года продлило работу «Индженьюити» на 2022 год в режиме зонда-разведчика для фиксирования с воздуха возможных препятствий и выбора оптимальных путей движения марсохода. Он будет летать еще как минимум до сентября 2022 года.
Камера марсохода запечатлела 8 апреля 2021 года процедуру проверки работы роторов «Индженьюити»
«Индженьюити» за 26 миссий и год работы пролетел в общем 6184 метра над поверхностью Марса и провел в режиме полета в атмосфере планеты 2950 секунд (более 49 минут). Достиг потолка 12 метров и развил максимальную скорость 5,5 м/c. За все полеты «Индженьюити» сделал с помощью своих камер несколько сотен цветных фотографий и более 3 тыс. черно-белых фотографий.
Примечательно, «Индженьюити» преодолел в атмосфере планеты две трети дистанции, которую марсоход «Персеверанс» в режиме научных исследований проехал по поверхности за все время.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО.
19 апреля «Индженьюити» совершил первый автономный полет, а марсоход сделал и прислал на Землю его видеозапись
Кадры третьего полета «Индженьюити» со стороны марсохода
7 апреля НАСА показало селфи марсохода «Персеверанс» с вертолетом «Индженьюити».
 Марсоход «Персеверанс» с вертолетом «Индженьюити», который готовится к первому полету. Источник фото: НАСА. Снимок сделан с помощью камеры WATSON, входящей в состав научного прибора SHERLOC, расположенного на конце манипулятора марсохода.
Марсоход «Персеверанс» с вертолетом «Индженьюити», который готовится к первому полету. Источник фото: НАСА. Снимок сделан с помощью камеры WATSON, входящей в состав научного прибора SHERLOC, расположенного на конце манипулятора марсохода.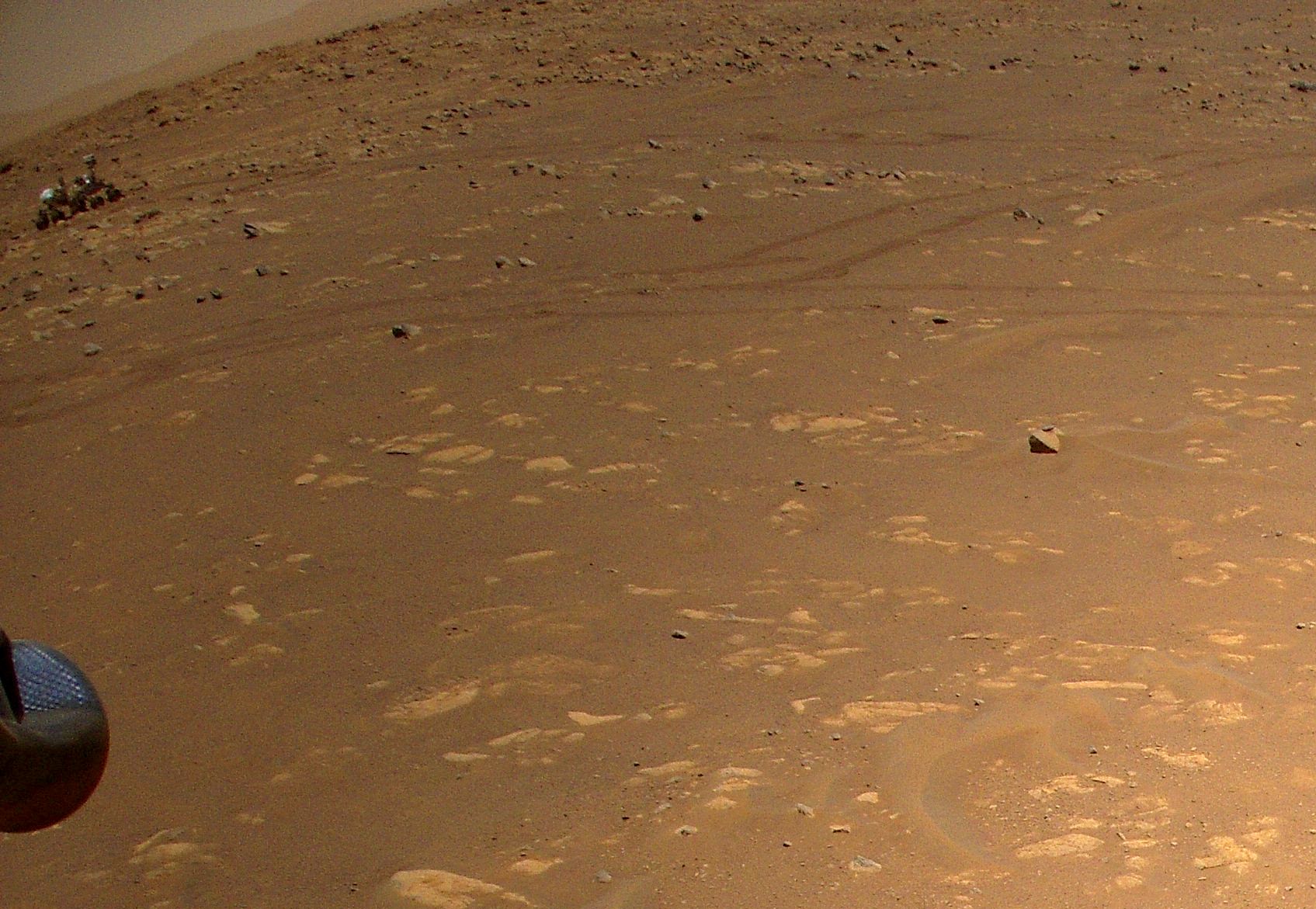 Марсианский вертолет «Индженьюити» во время полета №3 на высоте 5 метров и на удалении 85 метров от марсохода «Персеверанс». Источник фото: бортовая камера вертолета.
Марсианский вертолет «Индженьюити» во время полета №3 на высоте 5 метров и на удалении 85 метров от марсохода «Персеверанс». Источник фото: бортовая камера вертолета.




