Я занимаюсь разработкой роботов (как хобби) уже долгое время, и столкнулся с проблемой передачи видео через интернет со своего Raspberry PI 4 и Raspberry PI zero.
Сначала идея была в реализации WebRTC на node js, про что я написал в этой статье. Как было написано, проблема заключалась в высокой загрузке процессора.
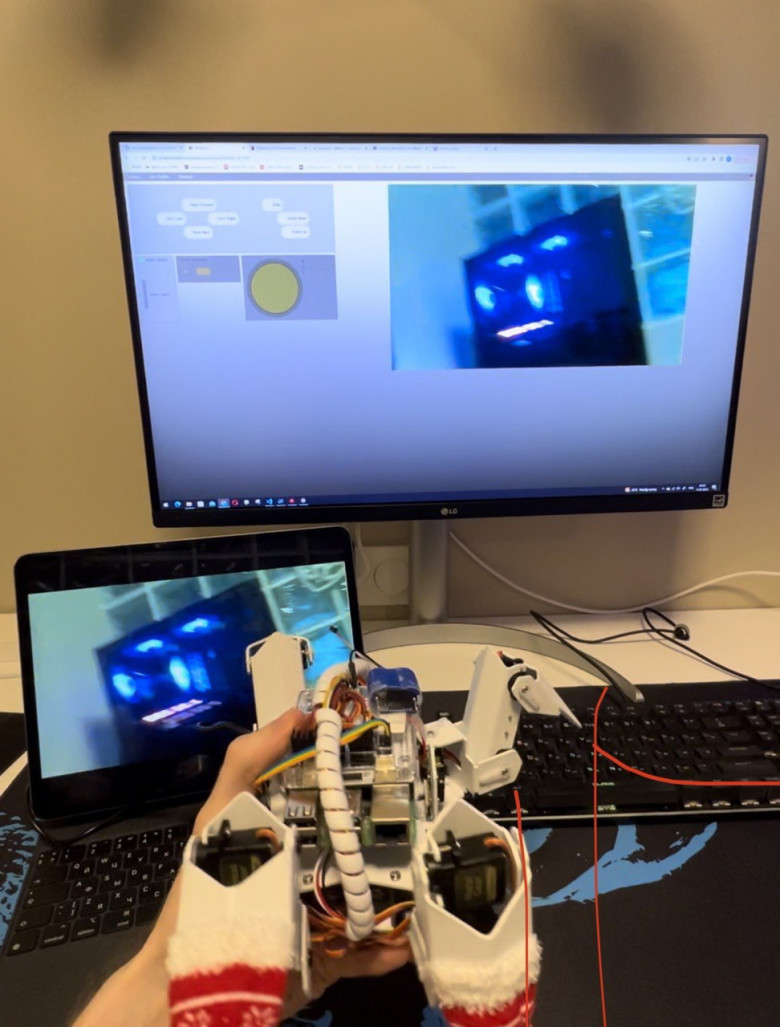
Немного слов обо мне: мое хобби это робототехника. На данный момент экспериментирую с шагающим роботом на базе SunFounder PiCrawler.
Последнее время тема искусственного интеллекта (ИИ) приобретает все большую популярность. Причиной этому служит в том числе совершенствование мобильных устройств и компьютеров - они становятся мощнее и компактнее.
В данной статье я постараюсь простыми словами объяснить, как можно применить ИИ для управления роботом, используя готовую библиотеку TensorFlow.
У меня была задача - передача видео с минимальной задержкой с Raspberry Pi до веб-интерфейса моего робота. Причем необходима была реализация на Node JS.
В этой статье я расскажу как можно реализовать стриминг с Raspberry Pi до веб-страницы используя WebRTC и Node JS.
I develop robots, and I'm often asked, "How to make a robot?" and "Where do you find information and what resources do you use?"
If you don't know where to start and want to create your own robot, this article is for you. In it, I will try to explain the process and also share the first steps you should take.
Я разрабатываю роботов и меня часто спрашивают — «как сделать робота», «где ты находишь информацию, какие ресурсы используешь»?
Если вы не знаете с чего начать и хотите сделать собственного робота — эта статья для вас — в ней я постараюсь объяснить процесс, а также расскажу какие должны быть первые шаги.