Привет, в одной из последних лекций по нейронным сетям на курсере речь шла о том, как можно улучшить сходимость алгоритма обратного распространения ошибки в общем, и в частности рассмотрели модель, когда каждый вес нейрона имеет свою собственную скорость обучения (neuron local gain). Я давно хотел реализовать какой нибудь алгоритм, который бы автоматически настраивал бы скорость обучения сети, но все лень руки не доходили, а тут вдруг такой простой и незамысловатый способ. В этой небольшой статье я расскажу про эту модель и приведу несколько примеров того, когда эта модель может быть полезна.
Начнем с теории, для начала вспомним чему равно изменение одного веса, в данном случае с регуляризацией, но сути это не меняет:

В базовом случае скорость обучения — это глобальный параметр для всех весов.
Введем для каждого веса каждого нейрона модификатор скорости обучения , а изменять веса нейронов будем по следующему правилу:
, а изменять веса нейронов будем по следующему правилу:

На первом батче обучения все модификаторы скорости обучения приравниваются к единице, далее динамическая настройка модификаторов в процессе обучения происходит следующим образом:

Имеет смысл бонус делать очень маленьким числом меньшим единицы, а пенальти , таким образом b + p = 1. Например a = 0.05, p = 0.95. Такая настройка гарантирует, что в случае осцилляции направления вектора градиента, значение модификатора будет стремиться обратно к начальной единице. Если не вдаваться в математику, то можно сказать так, что алгоритм поощряет те веса (рост в рамках какой то размерности пространства весов) которые сохраняют свое направление относительно предыдущего момента времени, и штрафует тех, кто начинает метаться.
, таким образом b + p = 1. Например a = 0.05, p = 0.95. Такая настройка гарантирует, что в случае осцилляции направления вектора градиента, значение модификатора будет стремиться обратно к начальной единице. Если не вдаваться в математику, то можно сказать так, что алгоритм поощряет те веса (рост в рамках какой то размерности пространства весов) которые сохраняют свое направление относительно предыдущего момента времени, и штрафует тех, кто начинает метаться.
Автор этого метода Geoffrey Hinton (он кстати один из первых предложил использовать градиентный спуск для обучения нейронной сети) так же советует учесть следующие вещи:
Все эксперименты проводились на множестве картинок 29 на 29 пикселей, на которых нарисованы английские буквы. Использовался один скрытый слой из 100 нейронов с сигмоиндной функцией активации, на выходе softmax слой, а минимизировалась перекрестная энтропия. Итого легко подсчитать что всего в сети 100 * (29*29 + 1) + 26 * (100 + 1) = 86826 весов (учитывая смещения). Начальные значения весов были взяты из равномерного распределения . Во всех трех экспериментах использовалась одна и та же инициализация весов. Так же используется полный батч.
. Во всех трех экспериментах использовалась одна и та же инициализация весов. Так же используется полный батч.
В этом эксперименте использовался простое, легкообобщаемое множество; значение скорости обучения (глобальная скорость) равняется 0.01. Рассмотри зависимость значения ошибки сети на данных, от эпохи обучения.
Видно что на очень простом множестве положительный эффект модификатора есть, но он не велик.
В противовес первому эксперименту, я взял множество, которое я уже как то обучал. Я был заранее в курсе что при скорости обучения 0.01, осцилляция значения функции ошибки начинается очень быстро, а при более меньшем значении множество обобщается. Но в данном тесте будет использоваться именно 0.01, т.к. хочется посмотреть что произойдет.

Полный провал! Модификатор не только не улучшил качество, а напротив, он усилил осцилляцию, в то время как без модификатора, ошибка в среднем падает.
В этом эксперименте я использую то же множество, что и во втором, но глобальная скорость обучения равна 0.001.
В данном случае мы получаем очень существенный прирост к качеству. И если после 300 эпох прогнать распознавание на обучающем множестве и тестовом:
А вывод я для себя сделал один, что этот способ не является заменой выбора глобальной скорости обучения, но является хорошим дополнением к уже подобранной скорости обучения.
Теория
Начнем с теории, для начала вспомним чему равно изменение одного веса, в данном случае с регуляризацией, но сути это не меняет:
- эта (η) — скорость обучения
- m — размер обучающего множества
- n — номер слоя
- полная нотация тут
В базовом случае скорость обучения — это глобальный параметр для всех весов.
Введем для каждого веса каждого нейрона модификатор скорости обучения
, а изменять веса нейронов будем по следующему правилу:На первом батче обучения все модификаторы скорости обучения приравниваются к единице, далее динамическая настройка модификаторов в процессе обучения происходит следующим образом:
 — значение градиента в определенный момент времени
— значение градиента в определенный момент времени- тау τ — текущий момент времени или текущий батч обучения
- b — аддитивный бонус, который получает модификатор, если направление градиента по определенной размерности не меняется
- p — мультипликативный штраф, в случае смены направления вектора градиента
Имеет смысл бонус делать очень маленьким числом меньшим единицы, а пенальти
, таким образом b + p = 1. Например a = 0.05, p = 0.95. Такая настройка гарантирует, что в случае осцилляции направления вектора градиента, значение модификатора будет стремиться обратно к начальной единице. Если не вдаваться в математику, то можно сказать так, что алгоритм поощряет те веса (рост в рамках какой то размерности пространства весов) которые сохраняют свое направление относительно предыдущего момента времени, и штрафует тех, кто начинает метаться.Автор этого метода Geoffrey Hinton (он кстати один из первых предложил использовать градиентный спуск для обучения нейронной сети) так же советует учесть следующие вещи:
- во-первых стоит задать разумные пределы роста для модификаторов
- во-вторых не стоит использовать этот прием для онлайн обучения, или для маленьких батчей; нужно что бы в процессе батча аккумулировался достаточно общий градиент; а иначе увеличивается частота осцилляции направления, и тем самым теряется смысл в модификаторе
Эксперименты
Все эксперименты проводились на множестве картинок 29 на 29 пикселей, на которых нарисованы английские буквы. Использовался один скрытый слой из 100 нейронов с сигмоиндной функцией активации, на выходе softmax слой, а минимизировалась перекрестная энтропия. Итого легко подсчитать что всего в сети 100 * (29*29 + 1) + 26 * (100 + 1) = 86826 весов (учитывая смещения). Начальные значения весов были взяты из равномерного распределения
. Во всех трех экспериментах использовалась одна и та же инициализация весов. Так же используется полный батч.Первый
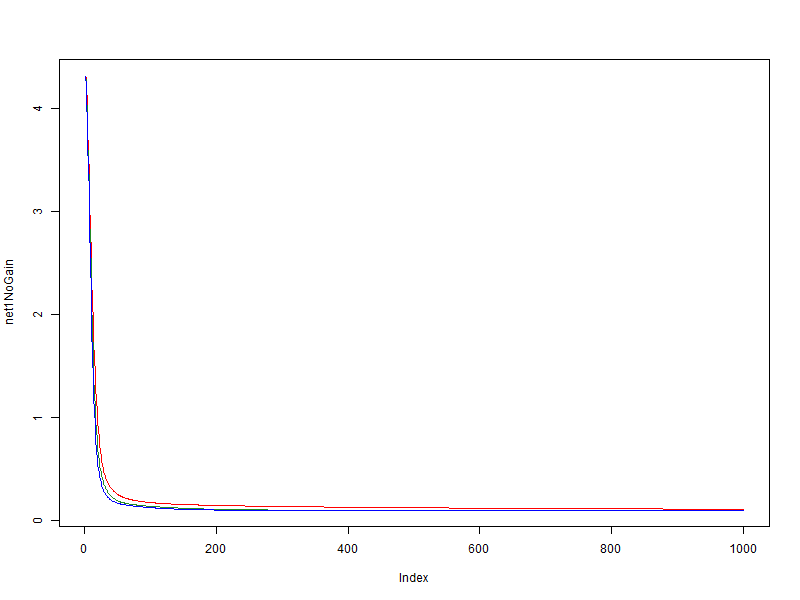
В этом эксперименте использовался простое, легкообобщаемое множество; значение скорости обучения (глобальная скорость) равняется 0.01. Рассмотри зависимость значения ошибки сети на данных, от эпохи обучения.
- красный — без использования модификатора
- зеленый — bonus = 0.05, penalty = 0.95, limit = [0.1, 10]
- синий — bonus = 0.1, penalty = 0.9, limit = [0.01, 100]
Видно что на очень простом множестве положительный эффект модификатора есть, но он не велик.
Второй
В противовес первому эксперименту, я взял множество, которое я уже как то обучал. Я был заранее в курсе что при скорости обучения 0.01, осцилляция значения функции ошибки начинается очень быстро, а при более меньшем значении множество обобщается. Но в данном тесте будет использоваться именно 0.01, т.к. хочется посмотреть что произойдет.
- красный — без использования модификатора
- синий — bonus = 0.05, penalty = 0.95, limit = [0.1, 10]
Полный провал! Модификатор не только не улучшил качество, а напротив, он усилил осцилляцию, в то время как без модификатора, ошибка в среднем падает.
Третий
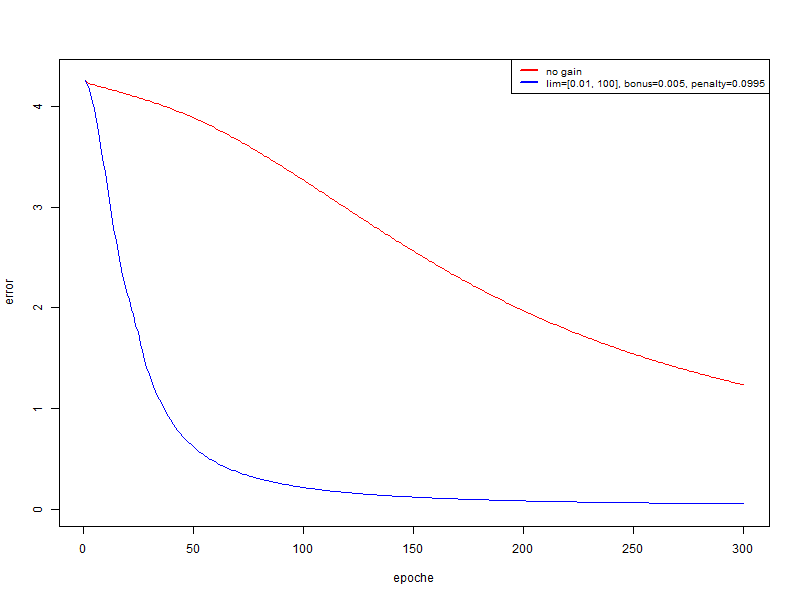
В этом эксперименте я использую то же множество, что и во втором, но глобальная скорость обучения равна 0.001.
- красный — без использования модификатора
- синий — bonus = 0.005, penalty = 0.995, limit = [0.01, 100]
В данном случае мы получаем очень существенный прирост к качеству. И если после 300 эпох прогнать распознавание на обучающем множестве и тестовом:
- красный: на обучающем множестве 94.74%, на тестовом 67.18%
- синий: на обучающем множестве 100%; на тестовом 74.4%
Вывод
А вывод я для себя сделал один, что этот способ не является заменой выбора глобальной скорости обучения, но является хорошим дополнением к уже подобранной скорости обучения.
