
Авиамоделизму, как хобби, десятки лет. И на рынке аппаратуры радиоуправления давно сформировались свои лидеры и стандарты. Мультикоптеры же стали смиренно использовать существующие пульты ДУ от самолетов и вертолетов.
Насколько безопасны такие полеты? И почему коптеру нужен собственный пульт?
Пост содержит инструкцию по изменению механической части RC-передатчика Futaba T8FG. С незначительными отступлениями, эта инструкция может быть применена к большинству передатчиков, имеющихся в продаже.
Возможно, следуя инструкции, вы лишитесь гарантии на пульт или самого пульта вообще, но у вас останется мультикоптер. Возможно, не следуя инструкции, вы лишитесь мультикоптера, но зато пульт останется при вас.
Рекомендую к прочтению, если:
1) Вы собираетесь сделать/приобрести мультикоптер
2) Вы летаете на мультикоптере, используя самолетный пульт
3) Хотите быть в курсе особенностей управления авиамоделями
Введение. Стандартный пульт ДУ.
Перед тем, как приступить к описанию проблемы, даю краткий обзор типового летного пульта. Стандартный пульт управления летающей моделью выглядит так:
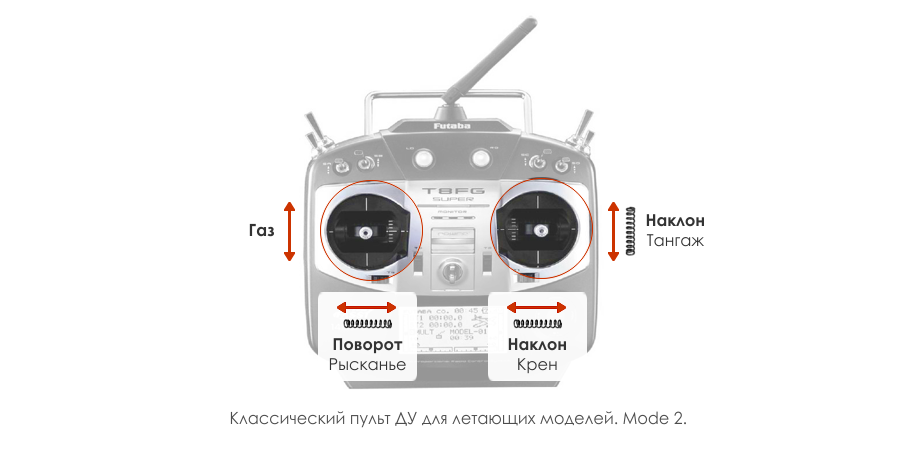
Как видно, такой аппарат имеет две основные ручки (называются стики). Обычно, ручка управления газом и поворотом находится слева. Тянем вверх: подъем, вправо-влево: поворот. Ручка стремится занять центральное положение по горизонтали (снабжена пружиной). А вот по вертикали есть 2 решения: самолетное (с трещоткой на ручке газа) и вертолетное (без нее). Причем, в обоих случаях вертикальная пружина не используется. Да и, собственно, зачем?
Многие производители позаботились о том, чтобы владелец мог самостоятельно переделать самолетный вариант в вертолетный и наоборот. Также предусматривается возможность сменить управление Mode1/Mode2 (то есть поменять ручки местами, как руль в машине). Кстати, вторая ручка стремится занять центральное положение по обоим направлением (имеет горизонтальное и вертикальное подпружинивание) и управляет креном и тангажом, что одинаково хорошо подходит как самолетам и вертолетам, так и мультикоптерам. А вот с управлением каналом газа все не так однозначно.
Часть1. Погружение в проблему.
Функции полетного контроллера
Как известно, мультикоптер управляется полетным контроллером. Это устройство имеет в своем составе необходимые датчики (гироскопы, акселерометры, барометр, компас, GPS-применик и проч.) и приближает управление мультикоптером к управлению обычным соосным вертолетом. Ведь, если бы не контроллер, управлять пришлось бы 4-мя или даже 8-ю винтами по-отдельности, что сделало бы мультикоптеры самым распространенным типом мусора на помойках после падений.
Контроллеры бывают разные. Самые дешевые стабилизируют аппарат только по горизонту. При этом он может «плыть» вверх, вниз или вбок с произвольной скоростью, если вы бросили ручки. Не буду рассматривать управление такими устройствами, так как это удел продвинутых пилотов, которые и без пульта все сделают правильно. Остановимся на более распространенных моделях, оснащенных хотя бы функцией удержания высоты (наглядная демонстрация режима на видео).
Самой популярной из подходящих систем, пожалуй, является Naza от компании DJI Innovations. На ее примере мы и рассмотрим адаптацию пульта.
Проблема контроля высоты полета
После установки такого контроллера на мультикоптер ручка управления газом по-сути превращается в регулятор высоты полета, удерживающий аппарат на месте при среднем ее (ручки) положении. Тянем вверх — летим вверх, вернули в центр — остановка. Если вы используете стандартный пульт, то среднее положение ручки иногда приходится контролировать посматривая на нее и отвлекаясь от пилотирования.
Ситуация усложняется, когда вы начинаете FPV-полеты по камере. Например, нужно облететь объект по кругу несколько раз камерой в сторону объекта на высоте 25 метров при условии, что на пути есть деревья высотой 20 метров. При использовании дисплея еще можно переключить внимание на рукоятку или на модель, а вот в видеоочках остается только всматриваться в показатели высоты и вертикального ускорения, если система OSD, накладывающая полетную информацию на видео, у вас вообще установлена. Палец положения стика строго по вертикали не чувствует.
Повторюсь, эта проблема существует только у тех коптеров, которые имеют барометр и функцию удержания высоты. Если у вас такой функции нет, то и среднее положение стика вам ни к чему — аппарат все равно будет «плавать» по вертикали.
Проблема выключения моторов
Naza, как и некоторые другие контроллеры, имеет режим, в котором моторы отключаются при газе меньше 10%. Режим хорош тем, что в случае аварии или опасности даже не очень опытный пилот инстинктивно выключит моторы, что может серьезно облегчить последствия катастрофы.
С другой стороны, это заставляет новичков беспокоиться при снижении с большой высоты. Чуть сильнее опустили ручку — и мы в свободном падении. Перестраховались — и потеряли заряд батареи при слишком медленном снижении. Особенно это важно при сверхвысоких полетах по камере, когда спуск происходит на последнем издыхании батареи, а звука моторов не слышно, если у вас нет наушников. Свободное падение более 5 секунд, и моторы уже не запустятся при увеличении газа, их теперь нужно включать специальной командой (CSC). Попробуй разберись при падении что там вообще происходит.
Есть, конечно, режимы, не отключающие команды вовсе (по команде или по тумблеру), но это не самый безопасный выход для начинающих. Например, мы так сломали винт и испортили паркет при тесте в офисе. Коптер стал заваливаться набок, и миллисекунды поиска комбинации выключения моторов привели к печальным последствиям. Отключились бы они при сбросе газа, и все было бы в полном порядке. И наоборот, один раз неполадки в технике привели к экстренной посадке коптера на поле вдалеке. Нужно было отключиться при первом касании травы для наиболее мягкого приземления. Все прошло «на ура», так как был выбран режим остановки при сбросе газа.
Каждый, конечно, выбирает режим выключения сам, он лично мне комфортнее использовать сброс газа. И проблемы случайной остановки двигателей при этом нужно как-то решать.
Подпружинивание рукоятки газа
С одной стороны, хотелось бы иметь подпружинивание ручки газа, оставляющее ее в среднем положении аналогично управлению тангажом. Тем более, в большинстве пультов имеется возможность такой доработки. Тогда коптер, если отпустить ручки, всегда стабилизировался бы в воздухе. Идеальный аппарат, особенно при подключении GPS и включении 3-х мерной стабилизации! Но ведь это газ! На летательном аппарате! Мы никак не можем использовать пружину, поднимающую стик в центральное положение — это опасно.
Часть 2. Поиск решений.
Несколько первых дней полетов я мучился с управлением, боясь то заглушить моторы при спуске, то врезаться в дерево, не заметив небольшого планомерного снижения. Казалось, придется привыкать, но в голове постепенно вырисовывались требования к управлению:
1) Фиксация ручки в центральном положении со щелчком
2) Дополнительное усилие при снижении газа меньше 10%
3) Пружина на ручке, каким-то образом не снижающая безопасность использования пульта
Вот что у меня получилось:

На горизонтальной оси треугольниками отмечены те места, где ручка должна щелкать при перемещении. Сверху показано как должна работать пружина. Она доводит ручку до центрального положения только из состояния «выше центра». То есть, подлетая к препятствию, дергаем ручку вверх, ждем и отпускаем ее. Ручка возвращается в нормальное положение. Коптер, поднявшись вверх, продолжает движение на новой заданной высоте. Удобно. При снижении же пружина работать не должна, чтобы ручку газа можно было спокойно переместить вниз при завершении полета.
Часть 3. Механическая модернизация передатчика
Так случилось, что я использую один из самых распространенных пультов Futaba T8FG, на примере которого и напишу инструкцию. Если у вас другая модель, уверен, внутренности очень похожи. Единственная разница может быть в том, что в механизме ручки газа иногда пружинки просто нет, а иногда она заблокирована специальным штырем. Если вам не повезло, значит нужно раздобыть пружинку.
- Важно! Если вас беспокоит даже обратимое изменение конструкции легендарного пульта Futaba, не читайте дальше, это может нанести моральную травму.
- Если вы используете пульт и для полетов на самолете, откажитесь от подпружинивания и нижнего щелчка. Наверняка, вы обладаете достаточным опытом для того, чтобы останавливать моторы тумблером. Средний щелчок, думаю, никак не помешает полетам на самолете.
- Если вы используете пульт для полетов на вертолете, щелчки не получатся все равно, так как у вас, по-идее, должна стоять насадка на зубья.
- Изменения обратимы конкретно для моей модели T8FG Super. На других моделях я, разумеется, не проверял, но должно все получиться.
Итак, снимаем крышку и трещотку с ручки газа:
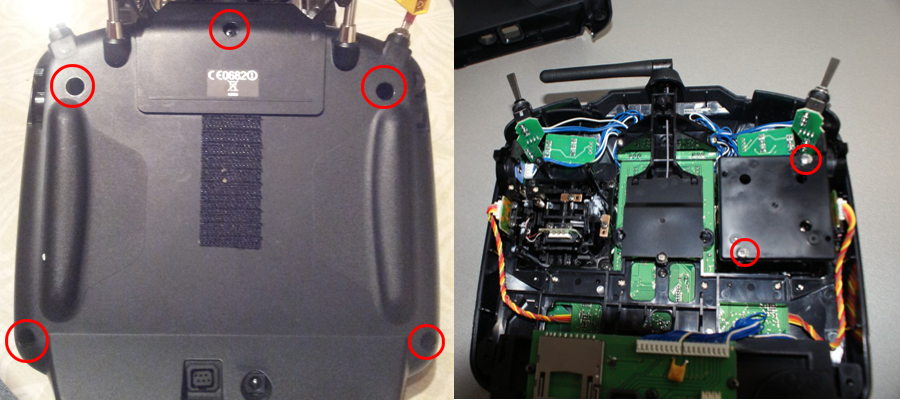
В моем пульте оказалось (фото ниже), что площадка с трещоткой (1) одновременно блокировала и пружинки специальным пластиковым штырем (2). О чудо — без этой площадки газ стал пружиниться сам! Подергав ручку, я понял, что для ее подпружинивания только в верхнем положении нужно удалить указанный металлический штырь (3), предварительно открутив винты и удалив пластиковое крепление (4), чтобы оно не мешало вынимать штырь щипцами. Результат (5) видно на крайнем правом изображении. Металлический штырь приклейте скотчем к крышке пульта со внутренней стороны, он может пригодиться при откате изменений. Вернув крепление (4) на место и отщепив кусачками кусок пластикового штыря (2), с проблемой пружин было покончено.

Как ни крутил я площадку с трещоткой (1), мне не удалось избежать откусывания пластикого штыря (2). Производитель предусмотрел возможность ее (площадки целиком) крепления под углом 90 градусов, но тогда вместе со штырем перемещается и трещотка. Оставить трещотку на месте, а штырек переместить, не представляется возможным. Может, в вашем пульте реализовано более гибко. В конечном счете это совсем не страшно. Можно приклеить этот штырек обратно при откате изменений, нагрузки и трения на нем нет. Можно поступить проще и отсоединить вертикальную пружинку, тогда штырек вообще не понадобится. Закрепите его на всякий случай скотчем на крышке от пульта, может, пригодится.
Теперь о том, как сделать фиксацию ручки и щелчки. Трещотка цепляет полукруглую пластинку с зубьями, движущуюся вместе с ручкой. На этой пластинке нужно поглубже выпилить один проем между зубьями в центральном положении ручки и второй ближе к нижнему положении ручки (я выпилил проем между 2-м и 3-м зубьями) по ходу движения стика (ручки). В качестве пилы использовался обыкновенный нож для сыра. Самый ответственный момент здесь — правильно найти проем центрального положения ручки. Сомневаетесь — сразу сильно не пилите.
В вашем пульте есть еще одна пластинка с зубьями на другой ручке, она не используется. При продаже пульта или, если понадобится, можно поменять ручки местами, убрав щелчки.
Часть 4. Программная часть
Все, что осталось сделать — это настроить газ так, чтобы нижний щелчок соответствовал значению чуть выше 10%. Тогда ваша ручка будет иметь свободный ход с самолетной трещоткой от 10% газа (максимальная скорость снижения коптера) до 50% (висение на заданной высоте), ограниченной двумя ощутимыми щелчками. Выше — в работу включается пружина, а ниже — выключение моторов.
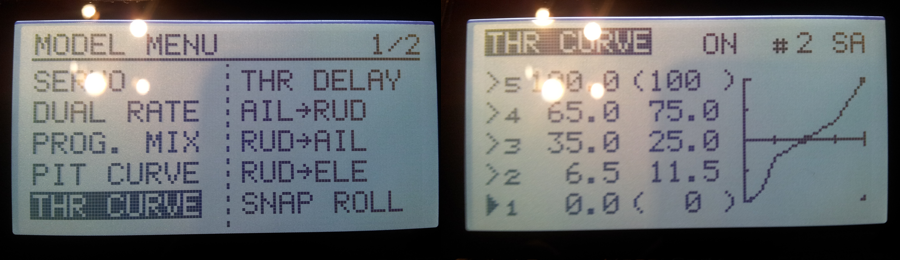
Заходим в меню аппаратуры и корректируем экспоненту газа (Futaba T8FG: Model menu > THR curve). Проверяем все несколько раз на мониторе движения серв (Futaba T8FG: Model menu > Servo). У меня получилось 12% газа при нижнем щелчке с такими настройками:
Заключение
Вот и все. Теперь можно комфортно летать на заданной высоте, просто забыв об управлении газом. Это позволит сосредоточиться на съемке объектов, например. А можно улететь в облака и контролировать выключение моторов на спуске. Получилось весьма удобно. Стик в начальном положении как будто имеет тумблер включения, имеющий короткий ход. Это совсем несущественно сокращает ход стика от централи до нижней границы (по-крайней мере, я вообще не ощутил изменений) а в среднем положении легкий, но ощутимый фиксатор, который не влияет на точность вертикального позиционирования стика. Фиксацию хорошо дополняет верхнее подпружинивание. Без него, на холоде, например, когда руки менее чувствительны, можно протянуть стик и мимо, так что самолетчикам, видимо, не помешает.
Костыль ли это? Хороший вопрос. Смотря что считать костылем. По крайней мере, это — костыль механический. Остальное, типа тумблеров блокировки 50%-го положения газа, будет функциональным костылем, который обеспечит результат с побочными и весьма ощутимыми эффектами. Думаю, что время мультикоптеров еще не настало, и именитые производители просто не включают в комплект адаптер для коптеров, заостряя внимание на вертолетно-самолетных и Mode 1-2 адаптациях своего оборудования. Специальные коптерные пульты начинают постепенно оснащать похожими механизмами, как например пульт от второй версии Phantom от DJI.
Надеюсь, не зря потратил полдня, и кому-то этот пост пригодится. Удачных полетов!)
