Следуя инструкции под катом (и имея в наличии все нужные компоненты), за несколько часов можно построить простой картонный робот-пылесос. Конечно, это, скорее, игрушка, но удивительно, сколько пыли она собирает с вроде-бы чистого пола. Также может быть любопытно опробовать на ней алгоритмы управления роботом-пылесосом, дополнить сонаром или другими датчиками препятствий.
(много картинок)
Требуемые компоненты:

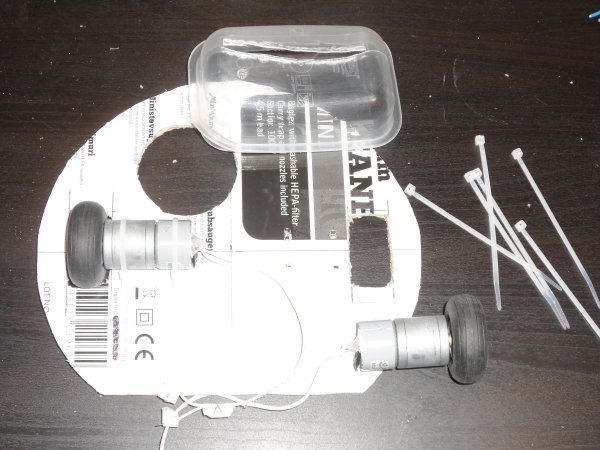
Определяется примерное расположение компонент, вырезается из картонна круг подходящего размера — шасси робота:

В шасси вырезаются отверстия для колес надетых на оси редукторов и под входное отверстие турбинки. Моторы прикрепляются к шасси пластиковыми стяжками:
К шасси термоклеем приклеивается турбина:
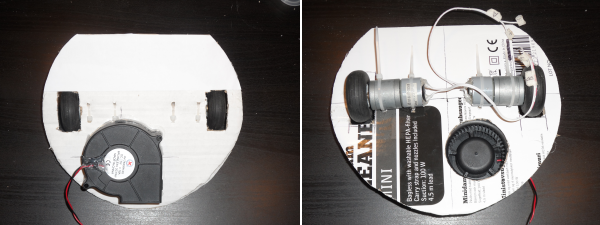
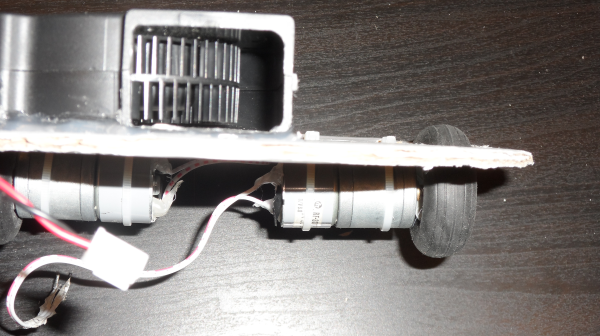
Турбина — на верху шасси, моторы — внизу:
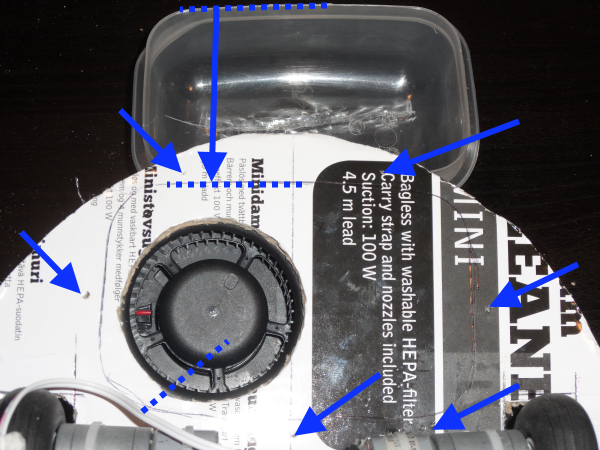
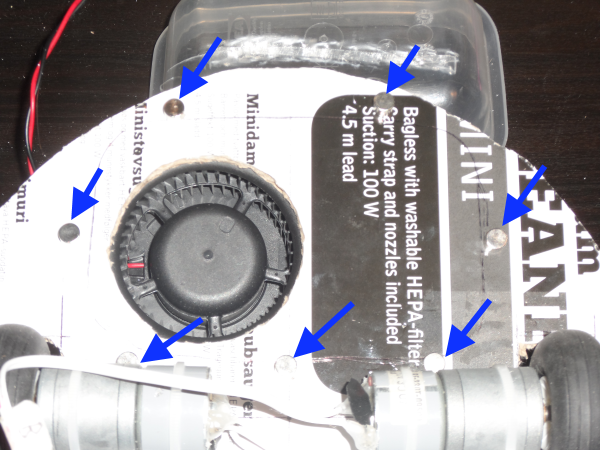
С нижней стороны шасси отмечается контур коробки (той, что для сбора пыли) и вокруг контура прокалываются насквозь отверстия, отмечая расположения магнитов — магнитами коробка будет удерживаться на шасси (простейший из испробованных ранее способов):
С верхней стороны шасси приклеиваются магниты на местах отметок-проколов. Если картон гофрированный — вырезается фрагмент верхнего слоя по размеру магнитов:

С нижней стороны шасси прикладываются магниты, подложив под них лист бумаги:
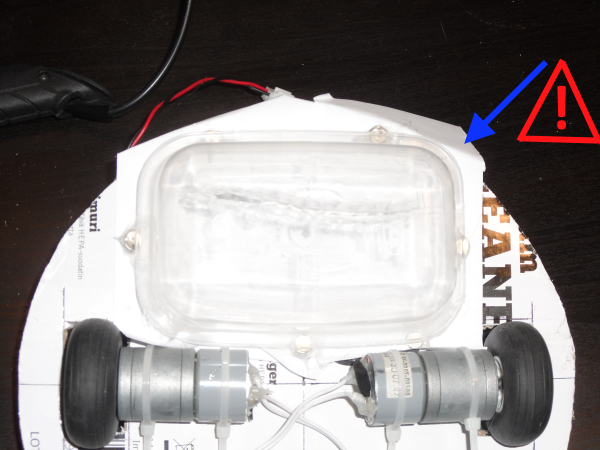
Коробка для пыли устанавливается между магнитами и приклеивается к ним:
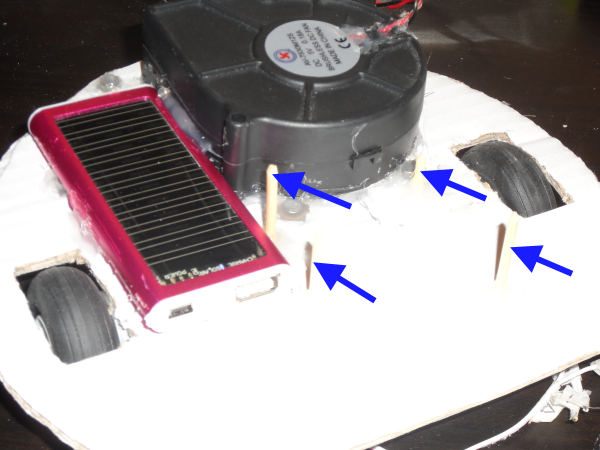
С верхней стороны шасси наклеиваются аккумуляторы или отсек с батареей и крепления для модуля Ардуино. В данном случае используются куски деревянных шпажек приклееных термоклеем.
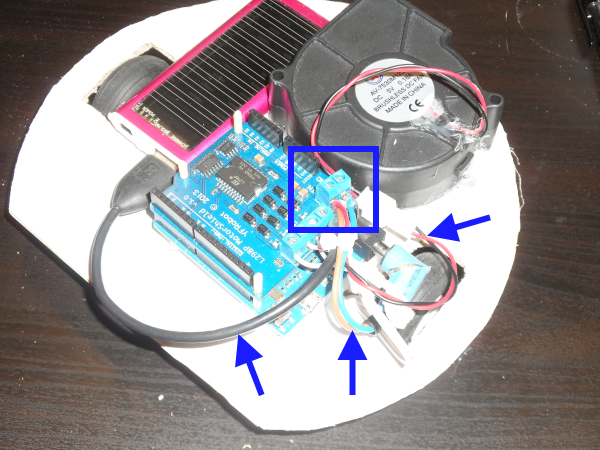
Модуль Ардуино с motor-shield устанавливаются в крепления. Провода питания от аккумулятора и Ардуино отрезаются по размеру.
Провода питания скручиваются (еще лучше — спаиваются), изолируются и подключаются к турбине, Ардуино, motor-shield и аккумулятору.
Из полосок картона вырезаются, сгибаются и склеиваются полукругом бамперы:
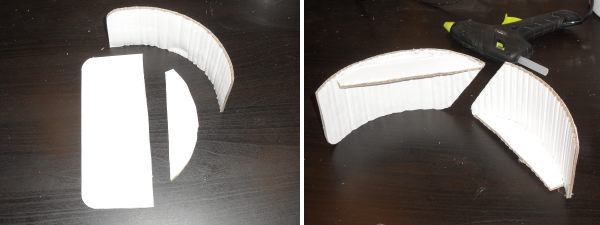
Бамперы приклеиваются с боков шасси — шасси предварительно подрезается так, чтобы приклеенные бамперы могли немного придавливаться к нему при столкновении с припятствием:

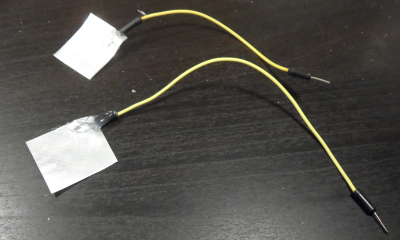
Два проводника присоединяются к двум кусочкам жести (предварительно зачищенной для хорошего контакта) и фиксируются на них термоклеем:
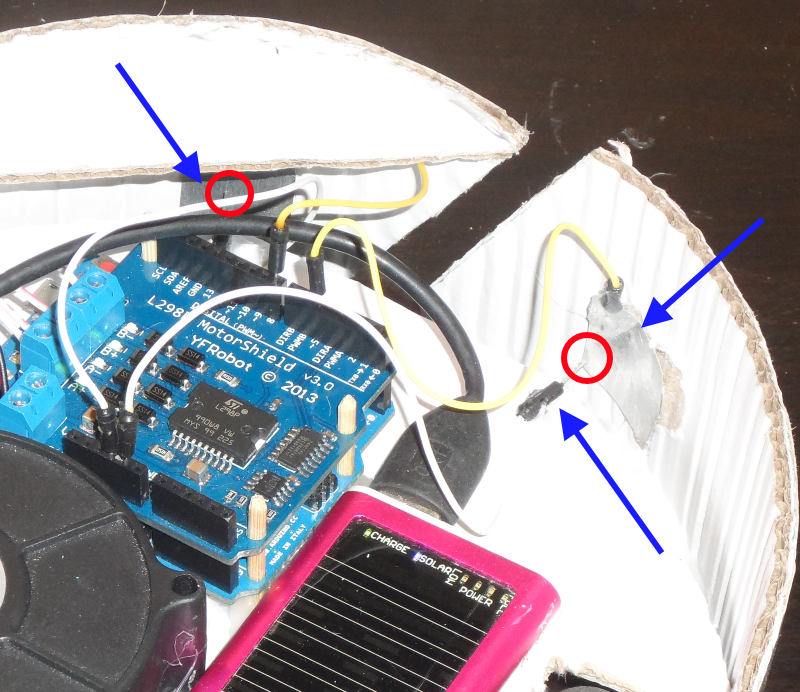
Кусочки жести приклеиваются к бамперам, их провода будут подключены к Ардуино (к контактам 5 и 8 для приведенной программы). Напротив них приклеиваются контакты двух других проводников, присоединяемые к контактам GND Ардуино.
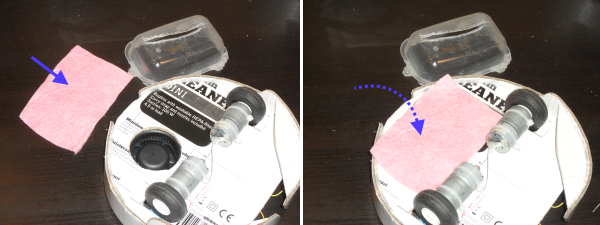
Для фильтрации пыли используется многослойная волокнистая синтетическая ткань (например прямоугольник вырезанный из салфетки вытирания столов на кухне) — фильтр кладется снизу на шасси и прижимается коробкой с приклеенными на нее магнитами:
В коробке прорезается длинное отверстие — краями выгнутыми наружу. К коробке приклеивается округлая опора — кусок пластика или пробки так, чтобы выгнутый край отверстия коробки находился на 1 мм над полом, когда робот установлен на колеса и опирается на опору. Высотой опоры можно регулировать качаство уборки и проходимость робота:

Если у коробки слишком высокие стенки — их можно укоротить, переклеив магниты:

Программа для Ардуино и motor-shield на Github.
Мотор с редуктором — 100-200 оборотов в минуту (RPM). Редукторы к моторам можно распечатать на 3D принтере — вот так выглядит картонный робот с распечатанными мотор-редукторами. Желательно также припаять конденсаторы на 0.1 мкФ между контактами моторов (обычно на радиоутравляемых игрушках такие конденсаторы уже припаяны).
Турбина — 5 вольт, 0.2 А; 12 вольт, 0.2 А — лучше (она мощнее), но требует преобразователя 5 вольт — 12 вольт (Step-Up converter). Находится на ebay по словам «cooling blower fan 5V».
Ардуино motor-shield — в данном случае YFRobot на микросхеме L298P; другие motor-shield могут иметь другие номера контактов и программно управляться иначе — например, этот. Также возможно использование внешних модулей управления двигателями или просто микросхему L293D (последнее потребует пайки).
(много картинок)
Требуемые компоненты:
- Модуль Ардуино
- Motor-shield — модуль управления двигателями, также известный как H-Bridge
- Два мотора с редукторами и проводами питания
- Два колеса
- Набор аккумуляторов, батареек или power-bank на 5 вольт
- Турбинка охлаждения для компьютера (не вентилятор, а именно турбина) на 5 вольт (или на 12 вольт — с преобразователем напряжения 5 вольт — 12 вольт)
- Набор сильных магнитов
- Кабель с USB коннектором
- Кабель с разъемом питания для Ардуино
- Провода для соединения контактов Ардуино
- Плотный картон
- Клеевой пистолет с термоклеем
- Кусочек жести (можно от консервной банки или алюминиевой банки из под сока)
- Пластиковую коробку — емкость для собираемой пыли
Определяется примерное расположение компонент, вырезается из картонна круг подходящего размера — шасси робота:
В шасси вырезаются отверстия для колес надетых на оси редукторов и под входное отверстие турбинки. Моторы прикрепляются к шасси пластиковыми стяжками:
К шасси термоклеем приклеивается турбина:
Турбина — на верху шасси, моторы — внизу:
С нижней стороны шасси отмечается контур коробки (той, что для сбора пыли) и вокруг контура прокалываются насквозь отверстия, отмечая расположения магнитов — магнитами коробка будет удерживаться на шасси (простейший из испробованных ранее способов):
С верхней стороны шасси приклеиваются магниты на местах отметок-проколов. Если картон гофрированный — вырезается фрагмент верхнего слоя по размеру магнитов:
С нижней стороны шасси прикладываются магниты, подложив под них лист бумаги:
Коробка для пыли устанавливается между магнитами и приклеивается к ним:
С верхней стороны шасси наклеиваются аккумуляторы или отсек с батареей и крепления для модуля Ардуино. В данном случае используются куски деревянных шпажек приклееных термоклеем.
Модуль Ардуино с motor-shield устанавливаются в крепления. Провода питания от аккумулятора и Ардуино отрезаются по размеру.
Провода питания скручиваются (еще лучше — спаиваются), изолируются и подключаются к турбине, Ардуино, motor-shield и аккумулятору.
Из полосок картона вырезаются, сгибаются и склеиваются полукругом бамперы:
Бамперы приклеиваются с боков шасси — шасси предварительно подрезается так, чтобы приклеенные бамперы могли немного придавливаться к нему при столкновении с припятствием:
Два проводника присоединяются к двум кусочкам жести (предварительно зачищенной для хорошего контакта) и фиксируются на них термоклеем:
Кусочки жести приклеиваются к бамперам, их провода будут подключены к Ардуино (к контактам 5 и 8 для приведенной программы). Напротив них приклеиваются контакты двух других проводников, присоединяемые к контактам GND Ардуино.
Для фильтрации пыли используется многослойная волокнистая синтетическая ткань (например прямоугольник вырезанный из салфетки вытирания столов на кухне) — фильтр кладется снизу на шасси и прижимается коробкой с приклеенными на нее магнитами:
В коробке прорезается длинное отверстие — краями выгнутыми наружу. К коробке приклеивается округлая опора — кусок пластика или пробки так, чтобы выгнутый край отверстия коробки находился на 1 мм над полом, когда робот установлен на колеса и опирается на опору. Высотой опоры можно регулировать качаство уборки и проходимость робота:
Если у коробки слишком высокие стенки — их можно укоротить, переклеив магниты:
Программа для Ардуино и motor-shield на Github.
Мотор с редуктором — 100-200 оборотов в минуту (RPM). Редукторы к моторам можно распечатать на 3D принтере — вот так выглядит картонный робот с распечатанными мотор-редукторами. Желательно также припаять конденсаторы на 0.1 мкФ между контактами моторов (обычно на радиоутравляемых игрушках такие конденсаторы уже припаяны).
Турбина — 5 вольт, 0.2 А; 12 вольт, 0.2 А — лучше (она мощнее), но требует преобразователя 5 вольт — 12 вольт (Step-Up converter). Находится на ebay по словам «cooling blower fan 5V».
Ардуино motor-shield — в данном случае YFRobot на микросхеме L298P; другие motor-shield могут иметь другие номера контактов и программно управляться иначе — например, этот. Также возможно использование внешних модулей управления двигателями или просто микросхему L293D (последнее потребует пайки).
