Microsoft Robotics Studio – это среда для моделирования и программирования роботов. Программировать можно на таких языках как С#, Visual Basic и на встроенном визуальном языке программирования VPL (Visual Programming Language). Программа не новая, но в Интернете очень мало информации, можно найти только описание самой программы и пару стандартных примеров.
Скачать Microsoft Robotics Studio
В цикле своих статей хочу описать лабораторные работы http://msdn.microsoft.com/en-us/library/dd772008.aspx. На досуге их перевел, протестировал и хочу описать. Кстати, они есть сразу при установке программы: Samples\VplHandsOnLabs\
В первой лабораторной работе рассказывается, как можно управлять роботом с помощью манипулятора. Нам потребуется два сервиса: манипулятор — Desktop Joystick и сенсор, который отвечает за получение данных для колёс, который называется Generic Differential Drive (GDD).
Мы их перетягиваем на диаграмму и связываем:
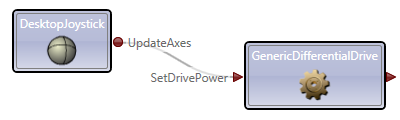
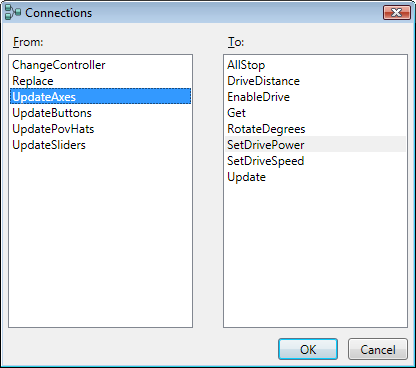
Очень важны свойства соединения со стороны Desktop Joystick мы ставим UpdateAxes, т.е. передаём каждый раз новые изменения на стороне манипулятора. А для GDD устанавливаем SetDrivePower, устанавливающий мощность колеса по заданной формуле:

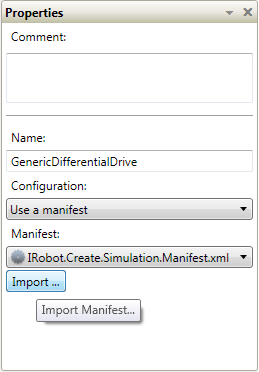
В Robotics имеется очень много видов роботов, которые также легко могут работать и на физическом уровне, который связывается по Bluetooth или ИК-порт. Ваша написанная диаграмма, может запускаться и на других роботах, выбирая нужный вам манифест (настройки для определенного робота в формате .xml). Для нашей диаграммы мы выбираем iRobot Create, который кстати будет использоваться и в некоторых других лабораторных работах.
Справо (стандартно) на панели Properties мы выбираем Use manifest, нажимаем Import и выбираем наш робот, который мы договорились использовать:
Сохраняем и нажимаем F5 и получаем на выходе стандартную среду и нашего робота, который управляется с помощью Desktop Joystick.

Эта работа очень простая, следующий раз буду описать, как программировать сенсоры на роботе.
Скачать Microsoft Robotics Studio
В цикле своих статей хочу описать лабораторные работы http://msdn.microsoft.com/en-us/library/dd772008.aspx. На досуге их перевел, протестировал и хочу описать. Кстати, они есть сразу при установке программы: Samples\VplHandsOnLabs\
В первой лабораторной работе рассказывается, как можно управлять роботом с помощью манипулятора. Нам потребуется два сервиса: манипулятор — Desktop Joystick и сенсор, который отвечает за получение данных для колёс, который называется Generic Differential Drive (GDD).
Мы их перетягиваем на диаграмму и связываем:
Очень важны свойства соединения со стороны Desktop Joystick мы ставим UpdateAxes, т.е. передаём каждый раз новые изменения на стороне манипулятора. А для GDD устанавливаем SetDrivePower, устанавливающий мощность колеса по заданной формуле:
В Robotics имеется очень много видов роботов, которые также легко могут работать и на физическом уровне, который связывается по Bluetooth или ИК-порт. Ваша написанная диаграмма, может запускаться и на других роботах, выбирая нужный вам манифест (настройки для определенного робота в формате .xml). Для нашей диаграммы мы выбираем iRobot Create, который кстати будет использоваться и в некоторых других лабораторных работах.
Справо (стандартно) на панели Properties мы выбираем Use manifest, нажимаем Import и выбираем наш робот, который мы договорились использовать:
Сохраняем и нажимаем F5 и получаем на выходе стандартную среду и нашего робота, который управляется с помощью Desktop Joystick.
Эта работа очень простая, следующий раз буду описать, как программировать сенсоры на роботе.
