В первой части мы разобрали как можно прошить выбранный МК, как его правильно сконфигурировать, а так же научились работать с цифровыми портами.
Теперь пришло время рассмотреть остальную периферию микроконтроллера.
Все параметры работы МК задаются через установку определенных значений в регистрах специального назначения (SFR).
Как и конфигурационные биты, все существующие в выбранном МК регистры доступны нам в виде переменных благодаря подключенной библиотеке.
Что бы узнать, какие биты в каких регистрах нам потребуются для конкретного модуля — придется снова заглянуть в документацию.
Для примера, взглянем на таблицу регистров, имеющих отношение к цифровым входам\выходам порта B:
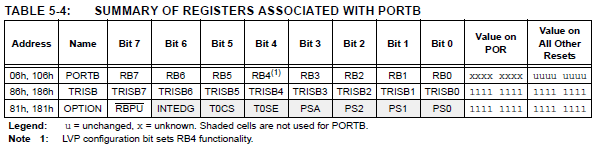
Считав значения регистра PORTB мы получим текущий логический уровень на каждой ножке порта.
Запись в регистр устанавливает указанный уровень на соответсующих ножках порта.
Каждый бит регистра нам доступен в виде отдельной переменной, именно через них мы управляли светодиодом и считывали состояние кнопки.
Регистр TRISB отвечает за направление данных через порт. Каждый из 8 битов регистра привязан к соответсвующей ножке МК.
Присвоив нужному биту единицу — мы сделаем из него вход, а присвоив ноль — выход.
Именно в этом регистре мы меняли биты через переменные pin_Bx_direction.
В регистре OPTION_REG к порту относится только старший бит:
Этот бит отвечает за подключение внутренней подтяжки, о которой было упоминание в первой части.
По таблице видно, что изначально подтяжка выключена, а значит при отсутствии внешней подтяжки необходимо включить внутреннюю самостоятельно:
При желании узнать принцип работы конкретного модуля поближе всегда можно найти в документации принципиальную схему.
Так как микроконтроллеры не поддерживают многозадачность, возникает ряд проблем по совмещению нескольких процессов.
Допустим, нужно нам мигать одним светодиодом постоянно с большим периодом, а второй переключать по нажатию кнопки.
Какой бы порядок действий мы не выбрали, как надо у нас ничего не заработает: ведь пока микроконтролер отсчитывает время до переключения первого светодиода он может пропустить факт нажатия кнопки.
Тут нам и придут на помощь прерывания.
При определенных условиях микроконтроллер может прервать выполнение бесконечного цикла и выполнить небольшую подпрограмму, после чего вернуться к выполнению основной задачи.
В выбранном нами МК 16f628a имеется 10 возможных источников прерываний:
Прерывание по каждому источнику можно как разрешить, так и запретить индивидуально изменяя соответствуюющие биты в регистрах INTCON и PIE1.
Для разрешения прерываний, управляемых регистром PIE1 необоходимо разрешить прерывания от перифирии битом PEIE в регистре INTCON.
После выбора необходимых источников прерываний необходимо глобально разрешить прерывания битом GIE в регистре INTCON.
Для каждого прерывания имеется еще один бит в регистре INTCON или PIR1 — флаг прерывания.
При срабатывании прерывания соответсвующему флагу присваивается значение 1, по которому можно легко определить какое из прерываний сработало.
Сбрасывать флаги прерываний необходимо вручную после входа в обработчик прерываний, иначе при нескольких источниках разобрать кто конкретно его вызвал будет невозможно.
В качестве примера использования прерываний перепишем нашу программу по миганию светодиодом.
Воспользуемся источником прерываний INT. В зависимости от состояния бита INTEDG в регистре OPTION прерывание будет генерироваться либо по переднему фронту сигнала (переход с низкого уровня к высокому), либо по заднему.
Для изменения уровня сигнала на INT неободимо перенести кнопку на соответсвующую ногу (pin 6).
Увы, это не самый оптимальный вариант по двум причинам:
Основная работа таймеров — считать. По завершению счета они могут генерировать прерывание. А так как счет идет аппаратно, не забивая процессорное время ожиданием, таймеры удачно подходят на замену нашим паузам.
Каждый из трех таймеров имеет свои особенности, потому для выполнение определенных задач нужно уметь выбрать более подходящий.
Что нам это дает?
При тактировании от системной частоты (в нашем случае — 4 MHz/4 = 1 Mhz) таймер будет генерировать прерывания с постоянной частотой.
Не сложно посчитать, что без предделителя прерывания будут иметь частоту 3906,25 Гц. Для светодиода — многовато.
Предделитель может на порядок (двойчный, т.е. в 2 раза) уменьшить частоту восемь раз.
При предделителе 1:256 мы получим частоту в 15.3 Гц. Мигание светодиодом с такой частотой вполне различимо человеческим глазом.
При тактировании МК от внешнего кварца можно добиться другого диапазона частот.
При тактировании таймера от внешнего источника таймер превращается в счетчик внешних импульсов. В принципе счета ничего не меняется, просто в зависимости от источника может не получиться постоянная частота прерываний. Счетчиком можно считать количество нажатий кнопки, оборотов колеса и пр. При этом никто не обязывает считать от нуля до прерывания: текущее значение счетчика всегда доступно как для чтения, так и для записи.
Основные отличия таймера от TMR0:
Использовать TMR1 можно так же, как и TMR0: или для генерирования определенной частоты, или для подсчета импульсов.
Данный 8-битный таймер имеет несколько иной принцип работы.
Тактироваться он может только от системной частоты. Предделитель может быть выставлен только на значения 1:1, 1:4 или 1:16.
Полученные импульсы таймер считает от нуля и до предварительно заданного значения PR2.
После совпадения TMR2 и PR2 подается сигнал на 4-битный постделитель, и только после переполнения постделителя генерируется прерывание.
Благодаря такой схеме можно корректировать конечную частоту прерываний с минимальным шагом.
Помимо постделителя, сигнал при совпадении PR2 может идти на модуль CCP в качестве базы тайминга ШИМ.
Как и TMR1, данный таймер можно отключить.
В качестве примера зададим частоту мигания светодиода таймером TMR1.
Список всех необходимых переменных можно узнать из таблицы:

Описание каждого бита можно найти в документации на микроконтроллер.
Модуль CCP (Capture/Compare/PWM) предназначен для измерения и формирования импульсных сигналов.
В режиме захвата модуль использует TMR1 в качестве измерителя времени. Как только на ножке CCP1 (pin 9) возникнет отслеживаемое событие, модуль сохранит текущее 16-битное значение TMR1 в регистры CCPR1H:CCPR1L.
Такими событиями могут быть:
Комбинируя события и высчитывая разность между полученными значениями таймера можно получить такие данные сигнала, как период, длительность импульсов или скважность. Например, некторые акселерометры передают информацию о полученном ускорении изменением скважности сигнала.
В режиме сравнения модуль рабоает в обратном направлении: как только значение в регистрах CCPR1H:CCPR1L совпадет с текущим значением TMR1, модуль может выставить 1 или 0 на ножке CCP1 (pin 9) или просто сгенерировать прерывание. Так же при совпадении модуль может обнулить TMR1.
Замеряя необходимые промежутки времени можно формировать импульсы определенной формы. Например, для управления положением сервомашинки требуется подавать на сигнальную линию импульсы высокого уровня длиной 700-2200 мкс с частотой 50 Hz. В зависимости от длины импульса серво установит свое положение либо в одно крайнее положение (700 мкс), либо в другое (2200 мкс), либо приблизительно по центру (1500 мкс).
В режиме ШИМ модуль самостоятельно формирует сигнал с частотой, генерируемой таймером TMR2, и заданной 10-битной скважностью.
Что такое ШИМ-сигнал?
Микроконтроллер может выдавать только цифровой сигнал — логические 1 и 0.
В ШИМ сигнале с постоянной частотой первую часть периода на выход подается 1, а вторую часть — 0. Меняя соотношение длительности обоих частей меняется скважность сигнала. Скважность ШИМ — это соотношение продолжительности импульса логической единицы и периода ШИМ. 10-битный ШИМ может обеспечить точность изменения скважности в 1/1024 длительности периода.
Как этим можно пользоваться?
Так как частота сигнала достаточно велика, то низкоскоростным нагрузкам будет казаться, что они получают напряжение, равное проценту скважности от максимума. Таким образом из ШИМ у нас выйдет обычный аналоговый выход с диапазоном напряжения от 0 до Vdd (в нашем случае — 5В).
Для высокоскоростных нагрузок (к примеру, для светодиодов) ШИМ сигнал будет регулировать процент времени работы. Для человеческого глаза мигание светодиода с большой частотой и переменной скважностью будет казаться постоянным горением с переменной яркостью.
Для работы с ШИМ имеется библиотека, потому нам не потребуется особых усилий по расчетам и настройке регистров.
Пример использования библиотеки:
Вся работа компаратора заключается в том, что бы сравнить два напряжения и сказать какое из них больше. Сравнение происходит постоянно (при включенном модуле), при изменении результата сравнения может генерироваться прерывание.
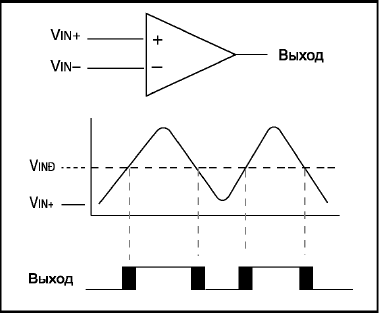
В зависимости от настроек, компараторы могут работать в восьми режимах:

По схемам хорошо видно какие напряжения сравниваются в каждом режиме, стоит только пояснить что такое опорное напряжение Vref.
Это еще один небольшой модуль, обычно требуется только для работы компараторов.
Единственная задача модуля — разделить напряжение питания до нужного значения.
Модуль представляет из себя простой делитель на 16 резисторах. Все, что он умеет — выделить пониженное до нужного значения напряжение из питания.
При питании 5В модуль может выдать напряжение от 0 до 3.6В.
В микроконтроллере 16f628a нам доступно 128 байт энергонезависимой памяти.
При использовании ассемблера нам пришлось бы много прочитать про порядок записи и чтения в память, нам же понадобится лишь подключить одну бибилотеку для работы с eeprom.
Для подключения библиотеки достаточно написать
после чего нам становится доступным ряд процедур и функций:
Единственное, о чем нужно помнить — о размере памяти. Записать dword по смещению 128 в данном случае не удастся.
USART — последовательный порт ввода-вывода. Данный модуль предназначен для связи микроконтроллера с другими устройствами.
Для организации канала связи достаточно лишь соединить Rx каждого устройства с Tx другого.
При желании настроить режим работы модуля самостоятельно можно подробно изучить документацию на микроконтроллер, но нам снова понадобится лишь одна библиотека.
Единственное, что нам требуется указать — скорость передачи данных. Максимальная скорость зависит от тактового сигнала МК. При 4 MHz рекомендуемая скорость — 2400.
После настройки можно начинать принимать и передавать байты.
Для организации связи с компьютером можно использовать UART-COM и UART-USB адаптеры. Впрочем, никто не мешает собрать их самостоятельно по схемам:
Как было видно, внешний кварц необходим не всегда. Но бывают и такие случаи, когда требуется использовать внешний тактовый сигнал.
Подключать внешний кварц нужно к ногам OSC1 и OSC2 (pin16 и pin 15):

Для распространенных кварцев резистор не нужен, ёмкость конденсаторов выбирается в зависимости от частоты кварца. Так же в зависимости от частоты выбирается режим, выставляемый в конфигурационном бите OSC:

Вместо кварца можно так же использовать керамический резонатор, он уже содержит в себе конденсаторы — для подключения резонатора достаточно подсоединить третий контакт к земле.
Вот мы и расмотрели основные возможности каждого модуля в микроконтроллере 16f628a. Конечно, в такой короткой статье невозможно описать все тонкости при работе с каждым модулем, при необходимости подробная информация о каждом модуле доступна в документации на каждый микроконтроллер.
С текущим набором перифирии можно выполнить довольно много разнообразных устройств, но иногда бывает проще перейти на более укомплектованный микроконтроллер. Благодаря универсальным библиотекам, начать работать с любым другим поддерживаемым МК не составит особого труда.
Теперь пришло время рассмотреть остальную периферию микроконтроллера.
Все параметры работы МК задаются через установку определенных значений в регистрах специального назначения (SFR).
Как и конфигурационные биты, все существующие в выбранном МК регистры доступны нам в виде переменных благодаря подключенной библиотеке.
Что бы узнать, какие биты в каких регистрах нам потребуются для конкретного модуля — придется снова заглянуть в документацию.
Для примера, взглянем на таблицу регистров, имеющих отношение к цифровым входам\выходам порта B:
Считав значения регистра PORTB мы получим текущий логический уровень на каждой ножке порта.
Запись в регистр устанавливает указанный уровень на соответсующих ножках порта.
Каждый бит регистра нам доступен в виде отдельной переменной, именно через них мы управляли светодиодом и считывали состояние кнопки.
Регистр TRISB отвечает за направление данных через порт. Каждый из 8 битов регистра привязан к соответсвующей ножке МК.
Присвоив нужному биту единицу — мы сделаем из него вход, а присвоив ноль — выход.
Именно в этом регистре мы меняли биты через переменные pin_Bx_direction.
В регистре OPTION_REG к порту относится только старший бит:
RBPU: PORTB Pull-up Enable bit
1 = PORTB pull-ups are disabled
0 = PORTB pull-ups are enabled by individual port latch values
Этот бит отвечает за подключение внутренней подтяжки, о которой было упоминание в первой части.
По таблице видно, что изначально подтяжка выключена, а значит при отсутствии внешней подтяжки необходимо включить внутреннюю самостоятельно:
OPTION_REG_NRBPU = 0При желании узнать принцип работы конкретного модуля поближе всегда можно найти в документации принципиальную схему.
Прерывания
Так как микроконтроллеры не поддерживают многозадачность, возникает ряд проблем по совмещению нескольких процессов.
Допустим, нужно нам мигать одним светодиодом постоянно с большим периодом, а второй переключать по нажатию кнопки.
Какой бы порядок действий мы не выбрали, как надо у нас ничего не заработает: ведь пока микроконтролер отсчитывает время до переключения первого светодиода он может пропустить факт нажатия кнопки.
Тут нам и придут на помощь прерывания.
При определенных условиях микроконтроллер может прервать выполнение бесконечного цикла и выполнить небольшую подпрограмму, после чего вернуться к выполнению основной задачи.
В выбранном нами МК 16f628a имеется 10 возможных источников прерываний:
- внешний источник прерываний INT
- изменение уровня сигнала на цифровых входах RB4:7
- переполнение таймера TMR0
- переполнение таймера TMR1
- совпадение TMR2 и PR2
- завершение записи в EEPROM
- изменение выходного уровня компаратора
- получение\завершение отправки данных через USART
- прерывания от модуля CCP
Прерывание по каждому источнику можно как разрешить, так и запретить индивидуально изменяя соответствуюющие биты в регистрах INTCON и PIE1.
Для разрешения прерываний, управляемых регистром PIE1 необоходимо разрешить прерывания от перифирии битом PEIE в регистре INTCON.
После выбора необходимых источников прерываний необходимо глобально разрешить прерывания битом GIE в регистре INTCON.
Для каждого прерывания имеется еще один бит в регистре INTCON или PIR1 — флаг прерывания.
При срабатывании прерывания соответсвующему флагу присваивается значение 1, по которому можно легко определить какое из прерываний сработало.
Сбрасывать флаги прерываний необходимо вручную после входа в обработчик прерываний, иначе при нескольких источниках разобрать кто конкретно его вызвал будет невозможно.
В качестве примера использования прерываний перепишем нашу программу по миганию светодиодом.
Воспользуемся источником прерываний INT. В зависимости от состояния бита INTEDG в регистре OPTION прерывание будет генерироваться либо по переднему фронту сигнала (переход с низкого уровня к высокому), либо по заднему.
Для изменения уровня сигнала на INT неободимо перенести кнопку на соответсвующую ногу (pin 6).
include 16f628a -- target PICmicro
--
pragma target clock 4_000_000 -- указываем рабочую частоту, необходимо для некоторых функций расчета времени
-- конфигурация микроконтролера
pragma target OSC INTOSC_NOCLKOUT -- используем внутренний кварц
pragma target WDT disabled -- сторожевой таймер отключен
pragma target PWRTE disabled -- таймер питания отключен
pragma target MCLR external -- внешний сброс активен
pragma target BROWNOUT disabled -- сбос при падении питания отключен
pragma target LVP disabled -- программирование низким напряжением отключено
pragma target CPD disabled -- защита EEPROM отключена
pragma target CP disabled -- защита кода отключена
--
enable_digital_io() -- переключение всех входов\выходов на цифровой режим
--
alias led is pin_B5 -- светодиод подключен к RB5
pin_B5_direction = output -- настраиваем RB5 как цифровой выход
--
alias button is pin_B0 -- кнопка подключена к RB0
pin_B0_direction = input -- настраиваем RB0 как вход
var volatile bit led_blink = false -- объявляем переменную
-- настраиваем прерывание
INTCON_INTE = on -- разрешаем прерывание по изменению сигнала на INT
INTCON_INTF = off -- сбрасываем флаг прерывания по INT
OPTION_REG_INTEDG = 0 -- генерировать прерывания при переходе 1->0
INTCON_GIE = on -- включаем обработку прерываний
-- обработчик прерывания INT
procedure INT_ISR is
pragma interrupt
if INTCON_INTF then -- проверяем флаг нужного нам прерывания
INTCON_INTF = off -- сбрасываем флаг прерывания
led_blink = !led_blink -- перключаем флаг светодиода
end if
end procedure
led = off -- выключаем светодиод
forever loop
led = off -- выключаем светодиод
_usec_delay(100000) -- ждем 0,1 сек
if led_blink then -- моргаем только при активном флаге
led = on -- ждем 0,1 сек
_usec_delay(100000) -- ждем 0,1 сек
end if
end loop
Увы, это не самый оптимальный вариант по двум причинам:
- из-за дребезга контактов кнопки прерывание может сработать несколько раз подряд, дребезг желательно подавлять программно
- в основном цикле программы у нас остались паузы, во время которых микроконтролер ничего не делает, кроме как ждет.
Таймеры
Основная работа таймеров — считать. По завершению счета они могут генерировать прерывание. А так как счет идет аппаратно, не забивая процессорное время ожиданием, таймеры удачно подходят на замену нашим паузам.
Каждый из трех таймеров имеет свои особенности, потому для выполнение определенных задач нужно уметь выбрать более подходящий.
TMR0
- 8-битный таймер (считает от 0 до 255)
- тактируется либо от системной частоты, либо от внешнего источника
- может считать как передние, так и задние фронты тактируемого сигнала
- 8-битный предделитель (может считать каждый второй, каждый 4… каждый 256 сигнал)
- прерывание генирируется при переполнении (при переходе от 255 к 0)
- таймер работает постоянно
Что нам это дает?
При тактировании от системной частоты (в нашем случае — 4 MHz/4 = 1 Mhz) таймер будет генерировать прерывания с постоянной частотой.
Не сложно посчитать, что без предделителя прерывания будут иметь частоту 3906,25 Гц. Для светодиода — многовато.
Предделитель может на порядок (двойчный, т.е. в 2 раза) уменьшить частоту восемь раз.
При предделителе 1:256 мы получим частоту в 15.3 Гц. Мигание светодиодом с такой частотой вполне различимо человеческим глазом.
При тактировании МК от внешнего кварца можно добиться другого диапазона частот.
При тактировании таймера от внешнего источника таймер превращается в счетчик внешних импульсов. В принципе счета ничего не меняется, просто в зависимости от источника может не получиться постоянная частота прерываний. Счетчиком можно считать количество нажатий кнопки, оборотов колеса и пр. При этом никто не обязывает считать от нуля до прерывания: текущее значение счетчика всегда доступно как для чтения, так и для записи.
При желании в режиме таймера можно увеличить частоту прерываний изменяя стартовое значение счетчика при каждом прерывании, но так как за время перехода на процедуру обработки уйдет неизвестное время, точно расчитать частоту не удастся.
TMR1
Основные отличия таймера от TMR0:
- данный таймер 16-битный
- таймер может тактироваться не только от внешнего источника, но и от дополнительного часового кварца
- максимально доступный предделитель — 1:8
- таймер может считать только передние фронты сигнала
- таймер может использоваться модулем CCP
- таймер можно отключать
Использовать TMR1 можно так же, как и TMR0: или для генерирования определенной частоты, или для подсчета импульсов.
TMR2
Данный 8-битный таймер имеет несколько иной принцип работы.
Тактироваться он может только от системной частоты. Предделитель может быть выставлен только на значения 1:1, 1:4 или 1:16.
Полученные импульсы таймер считает от нуля и до предварительно заданного значения PR2.
После совпадения TMR2 и PR2 подается сигнал на 4-битный постделитель, и только после переполнения постделителя генерируется прерывание.
Благодаря такой схеме можно корректировать конечную частоту прерываний с минимальным шагом.
Помимо постделителя, сигнал при совпадении PR2 может идти на модуль CCP в качестве базы тайминга ШИМ.
Как и TMR1, данный таймер можно отключить.
Пример использования
В качестве примера зададим частоту мигания светодиода таймером TMR1.
Список всех необходимых переменных можно узнать из таблицы:
Описание каждого бита можно найти в документации на микроконтроллер.
include 16f628a -- target PICmicro
--
pragma target clock 4_000_000 -- указываем рабочую частоту, необходимо для некоторых функций расчета времени
-- конфигурация микроконтролера
pragma target OSC INTOSC_NOCLKOUT -- используем внутренний кварц
pragma target WDT disabled -- сторожевой таймер отключен
pragma target PWRTE disabled -- таймер питания отключен
pragma target MCLR external -- внешний сброс активен
pragma target BROWNOUT disabled -- сбос при падении питания отключен
pragma target LVP disabled -- программирование низким напряжением отключено
pragma target CPD disabled -- защита EEPROM отключена
pragma target CP disabled -- защита кода отключена
--
enable_digital_io() -- переключение всех входов\выходов на цифровой режим
--
alias led is pin_B5 -- светодиод подключен к RB5
pin_B5_direction = output -- настраиваем RB5 как цифровой выход
--
-- настраиваем таймер
T1CON_T1CKPS = 0b_11 -- предделитель, 2 бита
T1CON_TMR1CS = 0 -- тактирование от системной частоты
PIE1_TMR1IE = on -- разрешаем прерывание от TMR1
PIR1_TMR1IF = off -- сбрасываем флаг прерывания от TMR1
INTCON_PEIE = on -- разрешаем прерывания от периферии
T1CON_TMR1ON = on -- включаем таймер
INTCON_GIE = on -- включаем обработку прерываний
--
;таймер тактируется от Fosc/4 : 4MHz/4 = 1 Mhz
;предделитель установлен на 1:8 : 1Mhz/8 = 125 kHz
;таймер - 16 бит : 125 kHz/65536 = 1.9 Hz
;светодиод включится и выключится за 2 прерывания : итоговая частота моргания 0,95 Hz
--
-- обработчик прерывания TMR1
procedure TMR1_ISR is
pragma interrupt
if PIR1_TMR1IF then -- проверяем флаг нужного нам прерывания
PIR1_TMR1IF = off -- сбрасываем флаг прерывания
led = !led -- переключаем состояние светодиода
end if
end procedure
forever loop
-- полностью свободный основной цикл
end loop
CCP
Модуль CCP (Capture/Compare/PWM) предназначен для измерения и формирования импульсных сигналов.
Capture
В режиме захвата модуль использует TMR1 в качестве измерителя времени. Как только на ножке CCP1 (pin 9) возникнет отслеживаемое событие, модуль сохранит текущее 16-битное значение TMR1 в регистры CCPR1H:CCPR1L.
Такими событиями могут быть:
- каждый задний фронт сигнала
- каждый передний фронт сигнала
- каждый четвертый передний фронт
- каждый 16 передний фронт
Комбинируя события и высчитывая разность между полученными значениями таймера можно получить такие данные сигнала, как период, длительность импульсов или скважность. Например, некторые акселерометры передают информацию о полученном ускорении изменением скважности сигнала.
Compare
В режиме сравнения модуль рабоает в обратном направлении: как только значение в регистрах CCPR1H:CCPR1L совпадет с текущим значением TMR1, модуль может выставить 1 или 0 на ножке CCP1 (pin 9) или просто сгенерировать прерывание. Так же при совпадении модуль может обнулить TMR1.
Замеряя необходимые промежутки времени можно формировать импульсы определенной формы. Например, для управления положением сервомашинки требуется подавать на сигнальную линию импульсы высокого уровня длиной 700-2200 мкс с частотой 50 Hz. В зависимости от длины импульса серво установит свое положение либо в одно крайнее положение (700 мкс), либо в другое (2200 мкс), либо приблизительно по центру (1500 мкс).
PWM
В режиме ШИМ модуль самостоятельно формирует сигнал с частотой, генерируемой таймером TMR2, и заданной 10-битной скважностью.
Что такое ШИМ-сигнал?
Микроконтроллер может выдавать только цифровой сигнал — логические 1 и 0.
В ШИМ сигнале с постоянной частотой первую часть периода на выход подается 1, а вторую часть — 0. Меняя соотношение длительности обоих частей меняется скважность сигнала. Скважность ШИМ — это соотношение продолжительности импульса логической единицы и периода ШИМ. 10-битный ШИМ может обеспечить точность изменения скважности в 1/1024 длительности периода.
Как этим можно пользоваться?
Так как частота сигнала достаточно велика, то низкоскоростным нагрузкам будет казаться, что они получают напряжение, равное проценту скважности от максимума. Таким образом из ШИМ у нас выйдет обычный аналоговый выход с диапазоном напряжения от 0 до Vdd (в нашем случае — 5В).
Для высокоскоростных нагрузок (к примеру, для светодиодов) ШИМ сигнал будет регулировать процент времени работы. Для человеческого глаза мигание светодиода с большой частотой и переменной скважностью будет казаться постоянным горением с переменной яркостью.
Для работы с ШИМ имеется библиотека, потому нам не потребуется особых усилий по расчетам и настройке регистров.
Пример использования библиотеки:
-- настраиваем ШИМ
pin_CCP1_direction = output -- настраиваем pin 9 как выход
include pwm_hardware -- подключаем библиотеку, упрощающую работу с ШИМ
pwm_max_resolution(4) -- устанавливаем значение предделителя TMR2 для выбора нужной частоты (976 Hz)
pwm1_on() -- включаем ШИМ
var bit fade_type = 1 -- переменная для направления изменения яркости
var byte i = 0 -- переменная для текущего уровня яркости
forever loop
-- меняем текущее значение
if fade_type then
i = i + 1
if i == 100 then
fade_type = 0
end if
else
i = i - 1
if i == 0 then
fade_type = 1
end if
end if
pwm1_set_percent_dutycycle(i) -- применяем новое значение яркости
_usec_delay(20000) -- делаем паузу, иначе процесс изменения яркости будет очень быстрым
end loop
Компараторы
Вся работа компаратора заключается в том, что бы сравнить два напряжения и сказать какое из них больше. Сравнение происходит постоянно (при включенном модуле), при изменении результата сравнения может генерироваться прерывание.
В зависимости от настроек, компараторы могут работать в восьми режимах:
По схемам хорошо видно какие напряжения сравниваются в каждом режиме, стоит только пояснить что такое опорное напряжение Vref.
Источник опорного напряжения
Это еще один небольшой модуль, обычно требуется только для работы компараторов.
Единственная задача модуля — разделить напряжение питания до нужного значения.
Модуль представляет из себя простой делитель на 16 резисторах. Все, что он умеет — выделить пониженное до нужного значения напряжение из питания.
При питании 5В модуль может выдать напряжение от 0 до 3.6В.
EEPROM
В микроконтроллере 16f628a нам доступно 128 байт энергонезависимой памяти.
При использовании ассемблера нам пришлось бы много прочитать про порядок записи и чтения в память, нам же понадобится лишь подключить одну бибилотеку для работы с eeprom.
Для подключения библиотеки достаточно написать
include pic_data_eepromпосле чего нам становится доступным ряд процедур и функций:
data_eeprom_read([offset],[byte]) -- процедура читает байт с номером [offset] и
-- заносит результат в переменную [byte]
data_eeprom_write([offset],[byte]) -- процедура записвает полученный байт [byte] на место [offset]
data_eeprom_read_word([offset],[word]) -- процедура считывает 2 байта: [offset] и [offset]+1
data_eeprom_write_word([ofset],[word]) -- процедура записывает 2 байта подряд
data_eeprom_read_dword([offset],[dword]) -- процедура считывает 4 байта подряд
data_eeprom_write_dword([offset],[dword]) -- процедура записывает 4 байта подряд
[byte] = data_eeprom([offset]) -- чтение байта через функцию
[word] = data_eeprom_word([offset]) -- чтение двух байт через функцию
[dword] = data_eeprom_dword([offset]) -- чтение 4 байт через функциюЕдинственное, о чем нужно помнить — о размере памяти. Записать dword по смещению 128 в данном случае не удастся.
USART
USART — последовательный порт ввода-вывода. Данный модуль предназначен для связи микроконтроллера с другими устройствами.
Для организации канала связи достаточно лишь соединить Rx каждого устройства с Tx другого.
При желании настроить режим работы модуля самостоятельно можно подробно изучить документацию на микроконтроллер, но нам снова понадобится лишь одна библиотека.
Единственное, что нам требуется указать — скорость передачи данных. Максимальная скорость зависит от тактового сигнала МК. При 4 MHz рекомендуемая скорость — 2400.
const serial_hw_baudrate = 2400 -- задаем скорость
include serial_hardware -- подключаем библиотеку
serial_hw_init() -- производим настройку модуля
После настройки можно начинать принимать и передавать байты.
serial_hw_write([byte]) -- процедура отправки байта [byte]
serial_hw_data = [byte] -- отправка байта через псевдопеременную
serial_hw_read([byte]):[boolean] -- при наличии присланного байта заносит значение в
-- переменную [byte] и возвращает true
-- при отсуствии присланных данных возвращает false
serial_hw_data_available -- при наличии принятых байт данная переменная возвращает true, иначе - false
[byte] = serial_hw_data -- чтение байта через псевдопеременную, при отсутствии
-- принятых байт микроконтролер будет ожидать их прихода
-- при использовании такого способа чтения необходимо проверять
-- факт прихода данныхДля организации связи с компьютером можно использовать UART-COM и UART-USB адаптеры. Впрочем, никто не мешает собрать их самостоятельно по схемам:
Внешний кварц
Как было видно, внешний кварц необходим не всегда. Но бывают и такие случаи, когда требуется использовать внешний тактовый сигнал.
Подключать внешний кварц нужно к ногам OSC1 и OSC2 (pin16 и pin 15):
Для распространенных кварцев резистор не нужен, ёмкость конденсаторов выбирается в зависимости от частоты кварца. Так же в зависимости от частоты выбирается режим, выставляемый в конфигурационном бите OSC:
Вместо кварца можно так же использовать керамический резонатор, он уже содержит в себе конденсаторы — для подключения резонатора достаточно подсоединить третий контакт к земле.
Итоги
Вот мы и расмотрели основные возможности каждого модуля в микроконтроллере 16f628a. Конечно, в такой короткой статье невозможно описать все тонкости при работе с каждым модулем, при необходимости подробная информация о каждом модуле доступна в документации на каждый микроконтроллер.
С текущим набором перифирии можно выполнить довольно много разнообразных устройств, но иногда бывает проще перейти на более укомплектованный микроконтроллер. Благодаря универсальным библиотекам, начать работать с любым другим поддерживаемым МК не составит особого труда.
