Я был в восторге, когда узнал об утечке проприетарного исходного кода Яндекса. И после анализа данных я должен сказать, что выводы оказались весьма интересными! Итак, без лишних слов, давайте окунемся в основные выводы, которые я сделал.

Нейросетевой хирург
Я был в восторге, когда узнал об утечке проприетарного исходного кода Яндекса. И после анализа данных я должен сказать, что выводы оказались весьма интересными! Итак, без лишних слов, давайте окунемся в основные выводы, которые я сделал.
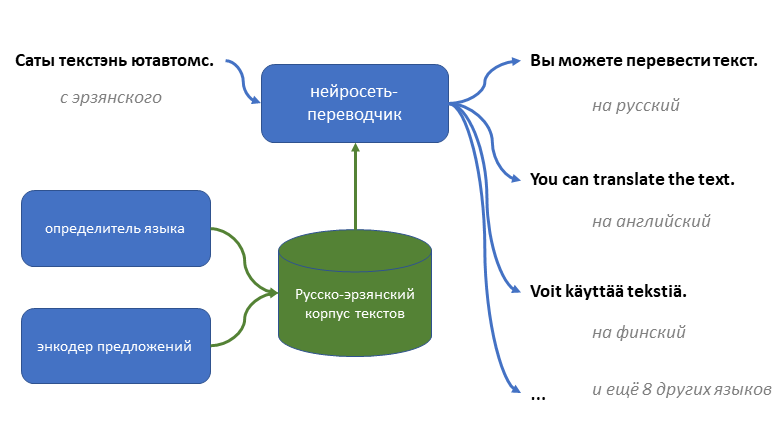
Эрзянский язык из финно-угорской семьи – один из официальных в республике Мордовия, и на нём говорят сотни тысяч людей, но для него до сих пор не было почти никаких технологий машинного перевода, кроме простых словарей.
Я попробовал создать первую нейросеть, способную переводить с эрзянского на русский (и с натяжкой ещё на 10 языков) и обратно не только слова, но и целые предложения.
Пока её качество оставляет желать лучшего, но пробовать пользоваться уже можно.
Как я собирал для этого тексты и обучал модели – под катом.
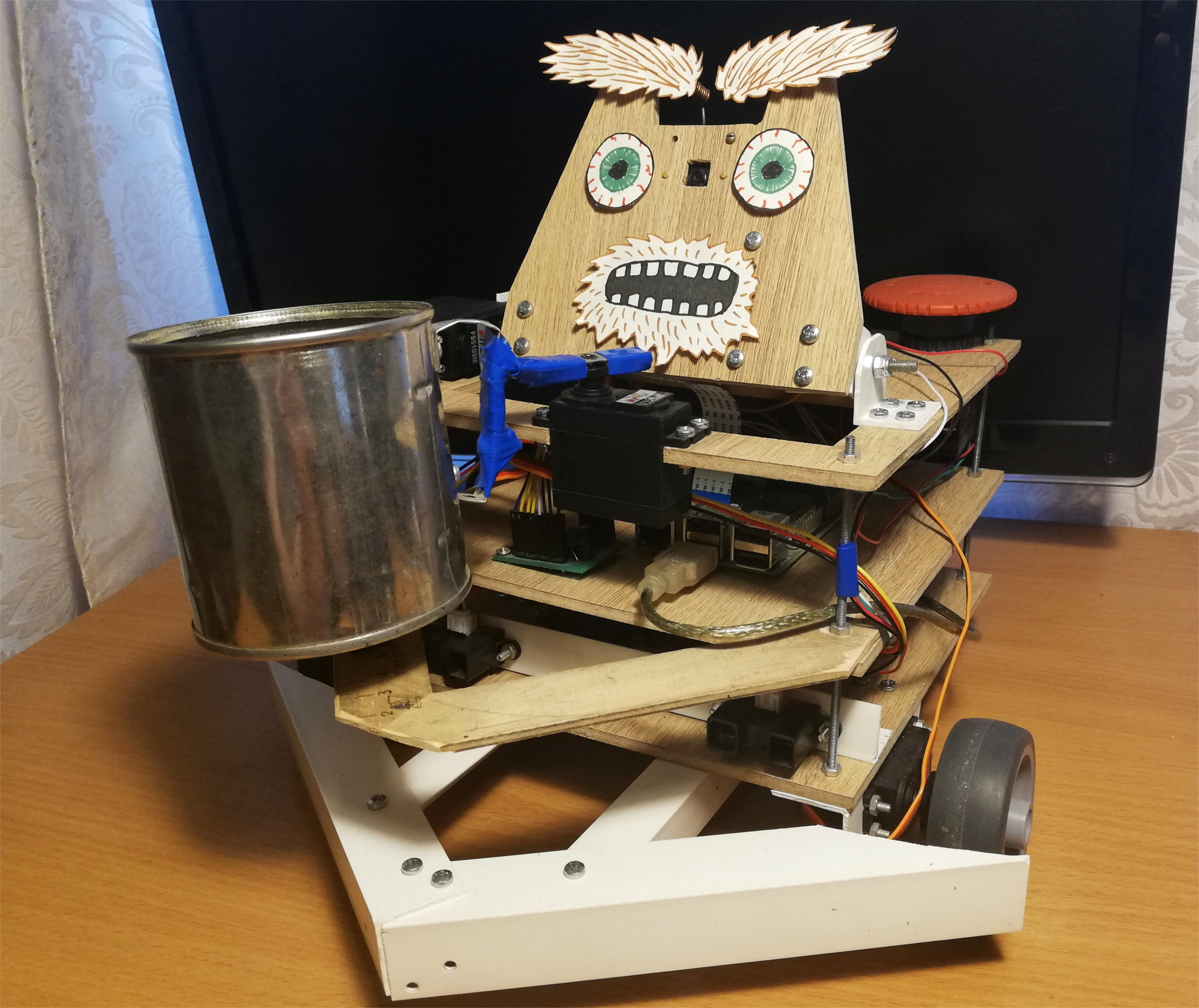
Продолжаю публикацию статей из серии "ардуино головного мозга". Петя — это очень дешёвый (примерно десять баксов) гексапод. Он может быть прекрасным проектом на один ненастный выходной, который развлечёт как и взрослых, так и детей. Раз уж мы про развлечения, вот вам видеоролик с Петей, танцующим под фанк-музыку:


Обучение с подкреплением (Reinforcement Learning) делится на два больших класса: Model-Free и Model-Based. В первом случае действия оптимизируются напрямую по сигналу награды, а во втором нейросеть является только моделью реальности, а оптимальные действия выбираются с помощью внешнего планировщика. У каждого подхода есть свои достоинства и недостатки.
Разработчики из Berkeley и Google Brain представили Model-Based алгоритм PDDM с улучшенным планировщиком, позволяющий эффективно обучаться сложным движениям с большим числом степеней свободы на небольшом числе примеров. Чтобы научиться вращать мячи в роботизированной руке с реалистичными суставами пальцев с 24 степенями свободы, потребовалось всего 4 часа практики на реальном физическом роботе.