
Рассказ о дрели на гусеницах, роботизации буровзрывных работ, симуляторе бурового станка, ретрофите и альпаках.

Робототехник
Рассказ о дрели на гусеницах, роботизации буровзрывных работ, симуляторе бурового станка, ретрофите и альпаках.
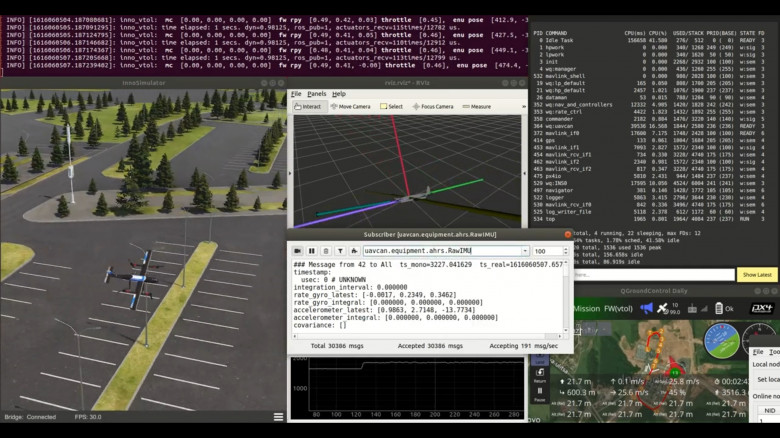
Hi from RaccoonLab, a team of enthusiasts in field robotics! We want to share our true-HITL UAVCAN-based simulator for PX4.
We believe a unified UAVCAN bus for drone onboard electronics will become a mainstream approach shortly. Our simulator is already based on UAVCAN (in opposition to UART-MAVLINK) and emulates exactly the same messages as real UAVCAN-sensors.

Мы разработали и хотим представить новый вариант HITL-симуляции дронов, когда автопилот может даже не знать, работает ли он с реальными датчиками на шине или же в симулируемом окружении. Набор программных модулей, работающих в «боевом» режиме и в режиме симуляции (почти) идентичен, в отличие от альтернативного MAVLINK-HITL подхода. Этот проект — наш вклад в экосистему вокруг PX4 и UAVCAN. Будем рады адоптерам и контрибьюторам.

Offroad Navigator — это как городской навигатор, только для бездорожья, для которого нет карт, да и маршруты прокладываются не всегда по дорогам, а с учетом проходимости местности.
Расскажу о первом этапе работы над проектом: как мы создаем трехмерную карту местности с использованием дрона, анализируем её проходимость, планируем маршрут движения для бульдозера, и как это все отлаживаем с помощью специального симулятора.
Такой планировщик — часть системы роботизированного строительства в будущем и визуальный интерфейс оператора на переходном этапе отладки и внедрения.

История о нашем первом проекте с кинодронами. В серии статей расскажу о том, как связаны кино и робототехника, и об особенностях управления коптером для автоматической видеосъемки. Также будет о нашем опыте в теме и голливудской мечте.

Немного соревнований автономных дронов, рассчитанных на взрослых разработчиков и организации, проводятся в России. В статье расскажу о нашем участии в Аэробот-2020. Мы и без соревнований работаем с актуальными технологиями локализации дрона в помещении, планирования движения и картографии (exploration), детекции объектов (perception) и оптимального управления движением. В условиях соревнования были задачи как раз из этой области.
Наша команда состояла из сотрудников Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис и студентов университета.
Под катом много увлекательных полетов и падений дронов.
В Центре компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис мы разработали прототип наземной посадочной платформы для беспилотного летательного аппарата.
Основное назначение таких платформ — борьба с недостатком БПЛА коптерного типа, малым временем работы. Аппарат может выполнить зарядку или замену батарей в посадочной станции, отдохнуть, принять ванну и продолжить свою миссию. Также такие платформы могут иметь и другие функции автоматического наземного обслуживания БПЛА — получение грузов, укрытие и хранение БПЛА, обмен данными и т.п.
За время работы над нашим прототипом накопились некоторые результаты поисковой и изобретательской работы в области конструкций платформ, которыми хотелось бы поделиться. Недавно на эту тему мы опубликовали статью в Sensors (это, как считается, неплохой журнал, но, чувствую, на Хабре просмотров будет больше). Здесь приведу ее краткий пересказ о том, какие посадочные платформы БПЛА бывают и кто их делает, чем отличаются их конструкции и как выбрать нужную под свои задачи.


