В одной из мозаик Пенроуза используются всего два ромба, отличающиеся углами. Из этих элементов можно выстроить апериодическую мозайку любых размеров. Для её отображения я попробовал представить координаты аналитически.
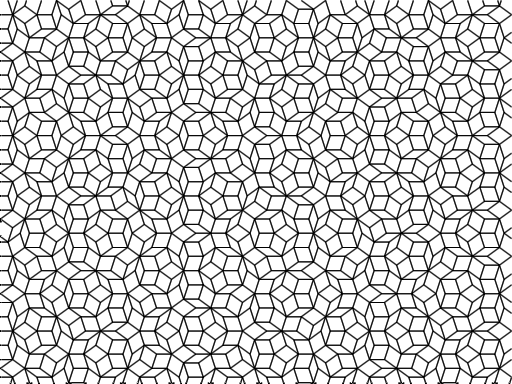
Распределение углов в ромбах в одном 1:4, 36°:144°, в другом 2:3, 72°:108°. Углы в ромбах кратны одной десятой полного разворота, 36°.
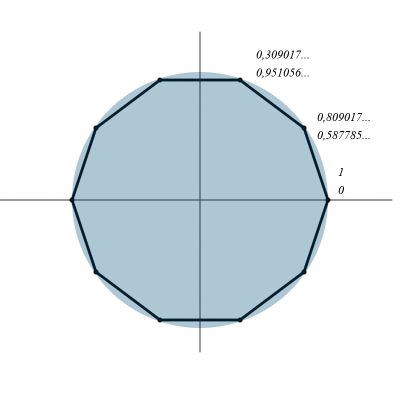
Определим координаты углов правильного десятиугольника.
Остальные симметрично, меняется только знак.
Сразу заметно, что косинусы углов 36° и 72° отличаются на 0,5. И это очень многозначительный факт!
Абсолютных значений координат ровно три штуки — и для координат абсциссных и для ординатных. Все три могут быть представлены как два коэффициента с целыми множителями.
Для абсциссных координат это просто: среди значений ноль, который представлен нулевыми множителями. Среди ординатных координат третья — единица — не соразмерна остальным двум. Но, так как разница координат это 0,5, то эта разница может стать одним из коэффициентов, а второй коэффициент будет меньшим значением. Значение 1 получится множителем 2.
И значит, существует целочисленная система координат.


Коэффициенты попарно различаются на один и тот же множитель, это коэффициент золотого сечения.



Можно вывести точное представление для коэффициентов.




Дальше магия золотого сечения:




Отсюда множество закономерностей:
Тривиальные:




Из-за равенства отношения коэффициентов:


Квадраты коэффициентов:



Произведение:

Исходя из этих свойств можно составить матрицу для целочисленного умножения векторов:
И всё перемножение сведётся к
Векторная единица в этой системе выражается как {2,0,0,0}. После простого переменожения таких единиц мы получим {4,0,0,0}. Так что, деление на два, которое было в каждой формуле для коэффициентов, производится отдельно, как нормировка:
Особенность этой координатной системы в том, что она покрывает всю плоскость с любой заданной точностью. Можно повторять любое количество шагов, выбирая любое из десяти направлений и всё равно оставаться в целочисленных координатах.
Но не все сочетания координат определяют место, достижимое из начального положения.
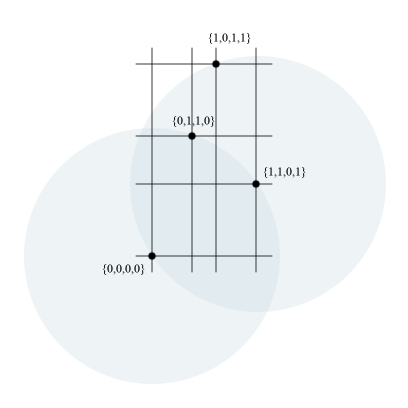
Для одного шага разложения по координатам следующие: {2,0,0,0}, {1,1,0,1}, {0,1,1,0}, {0,-1,1,0}, {-1,-1,0,1}, {-2,0,0,0}, {-1,-1,0,-1}, {0,-1,-1,0}, {0,1,-1,0}, {1,1,0,-1}. Любая комбинация этих шагов допустима.
Вместе с единичным шагом {2,0,0,0} сочетания
{0,1,1,0} – {0,1,-1,0} = {0,0,2,0},
{1,1,0,1} – {1,1,0,-1} = {0,0,0,2},
{1,1,0,1} + {1,1,0,-1} – {2,0,0,0} = {0,2,0,0}
означают, что любую отдельную координату можно сдвинуть на 2, и значит, на достижимость влияет только групповая четность координат. Достижимых сочетаний получается четыре: нулевая: {0,0,0,0}, от одиночных шагов: {1,1,0,1}, {0,1,1,0}, и их комбинация: {1,0,1,1}.
Как видно, групповая четность абциссных координат однозначно взаимосвязана c групповой четностью ординатных координат. Это значит, что вертикальные координаты делятся на четыре типа, горизонтальные координаты тоже делятся на 4 типа, а к координатной системе принадлежат точки исключительно при их правильной комбинации.
Для приближения к произвольной точке нужно разложить каждую координату на подходящие целые множители, учитывая при этом групповую четность.
В общем, существует система координат, которая совмещает целое значение координат и повороты в 36°. Когда я её вывел, был удивлён, что не знал о ней раньше. Но теперь о ней есть статья на Хабре.
Распределение углов в ромбах в одном 1:4, 36°:144°, в другом 2:3, 72°:108°. Углы в ромбах кратны одной десятой полного разворота, 36°.
Определим координаты углов правильного десятиугольника.
| градус | cos | sin |
|---|---|---|
| 0 | 1 | 0 |
| 36 | 0,809017 | 0,587785 |
| 72 | 0,309017 | 0,951056 |
Остальные симметрично, меняется только знак.
Сразу заметно, что косинусы углов 36° и 72° отличаются на 0,5. И это очень многозначительный факт!
Абсолютных значений координат ровно три штуки — и для координат абсциссных и для ординатных. Все три могут быть представлены как два коэффициента с целыми множителями.
Для абсциссных координат это просто: среди значений ноль, который представлен нулевыми множителями. Среди ординатных координат третья — единица — не соразмерна остальным двум. Но, так как разница координат это 0,5, то эта разница может стать одним из коэффициентов, а второй коэффициент будет меньшим значением. Значение 1 получится множителем 2.
| *36° | x | y | ||
| Cxa=0,5 | Cxb=0,309017 | Cya=0,951056 | Cxb=0,587785 | |
| 0 | 2 | 0 | 0 | 0 |
| 1 | 1 | 1 | 0 | 1 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | -1 | 1 | 0 |
| 4 | -1 | -1 | 0 | 1 |
| 5 | -2 | 0 | 0 | 0 |
| 6 | -1 | -1 | 0 | -1 |
| 7 | 0 | -1 | -1 | 0 |
| 8 | 0 | 1 | -1 | 0 |
| 9 | 1 | 1 | 0 | -1 |
И значит, существует целочисленная система координат.
Коэффициенты попарно различаются на один и тот же множитель, это коэффициент золотого сечения.
Можно вывести точное представление для коэффициентов.
Дальше магия золотого сечения:
Отсюда множество закономерностей:
Тривиальные:
Из-за равенства отношения коэффициентов:
Квадраты коэффициентов:
Произведение:
Исходя из этих свойств можно составить матрицу для целочисленного умножения векторов:
const crd vmul[16] = {
{ 1, 0, 0, 0}, { 0, 1, 0, 0}, { 0, 0, 1, 0}, { 0, 0, 0, 1},
{ 0, 1, 0, 0}, { 1,-1, 0, 0}, { 0, 0, 0, 1}, { 0, 0, 1,-1},
{ 0, 0, 1, 0}, { 0, 0, 0, 1}, {-3,-1, 0, 0}, {-1,-2, 0, 0},
{ 0, 0, 0, 1}, { 0, 0, 1,-1}, {-1,-2, 0, 0}, {-2, 1, 0, 0}
};
И всё перемножение сведётся к
int* vm = (int*)vmul;
for(int i = 0; i < 4; i++)
for(int j = 0; j < 4; j++)
for(int k = 0; k < 4; k++)
v3[k] += v1[i] * v2[j] * vm[(i * 4 + j) * 4 + k];Векторная единица в этой системе выражается как {2,0,0,0}. После простого переменожения таких единиц мы получим {4,0,0,0}. Так что, деление на два, которое было в каждой формуле для коэффициентов, производится отдельно, как нормировка:
for(int i = 0; i < 4; i++) v3[i] /= 2;Особенность этой координатной системы в том, что она покрывает всю плоскость с любой заданной точностью. Можно повторять любое количество шагов, выбирая любое из десяти направлений и всё равно оставаться в целочисленных координатах.
Но не все сочетания координат определяют место, достижимое из начального положения.
Для одного шага разложения по координатам следующие: {2,0,0,0}, {1,1,0,1}, {0,1,1,0}, {0,-1,1,0}, {-1,-1,0,1}, {-2,0,0,0}, {-1,-1,0,-1}, {0,-1,-1,0}, {0,1,-1,0}, {1,1,0,-1}. Любая комбинация этих шагов допустима.
Вместе с единичным шагом {2,0,0,0} сочетания
{0,1,1,0} – {0,1,-1,0} = {0,0,2,0},
{1,1,0,1} – {1,1,0,-1} = {0,0,0,2},
{1,1,0,1} + {1,1,0,-1} – {2,0,0,0} = {0,2,0,0}
означают, что любую отдельную координату можно сдвинуть на 2, и значит, на достижимость влияет только групповая четность координат. Достижимых сочетаний получается четыре: нулевая: {0,0,0,0}, от одиночных шагов: {1,1,0,1}, {0,1,1,0}, и их комбинация: {1,0,1,1}.
Как видно, групповая четность абциссных координат однозначно взаимосвязана c групповой четностью ординатных координат. Это значит, что вертикальные координаты делятся на четыре типа, горизонтальные координаты тоже делятся на 4 типа, а к координатной системе принадлежат точки исключительно при их правильной комбинации.
Для приближения к произвольной точке нужно разложить каждую координату на подходящие целые множители, учитывая при этом групповую четность.
В общем, существует система координат, которая совмещает целое значение координат и повороты в 36°. Когда я её вывел, был удивлён, что не знал о ней раньше. Но теперь о ней есть статья на Хабре.


