Comments 14
Механическая часть (рисунок 1) состоит из следующих элементов: исполнительного двигателя (ИД), в качестве которого используется коллекторный электродвигатель постоянного тока – ДПР 62-Н4-01
Я не нашел инфу, что к этому двигателю можно применять ШИМ. Вдруг чего-нибудь заклинит, как на тех Боингах.
"Двигатели ДПР-Н5, ДПР-Н9, ДПР-Ф5, ДПР-Ф9 предназначены для работы также при питании от широтноимпульсного модулятора, обеспечивающего среднее значение напряжения на выводных концах двигателя 20 В; частоту следования импульсов не менее 500 Гц и кважность импульсов не менее 0,2; форма импульса - прямоугольная."
К любым древним двигателям постоянного тока можно применять ШИМ, ничего не заклинит, не беспокойтесь
К любым древним двигателям постоянного тока можно применять ШИМ, ничего не заклинит, не беспокойтесь
Пацаны из контрразведки НКВД интересуются - огласите весь список актуальных изделий, в которых под ШИМом стоят моторы, по которым в документации явно нет инфы, что это разрешено. Репрессировать военприемщиков собираются за халатность, а может и не за халатность.
Рис 11 крайне подозрителен. Обычно "мёртвая зона" моторов/клапанов намного шире, и никакой ШИМ этого не исправит. Моделировать мотор "гладким" образом недопустимо для серьёзных инженеров.
Так это же экспериментальная, естественная регулировочная характеристика коллекторного двигателя, полученная без применения всякого ШИМа. Подаёшь напряжение и снимаешь положение -> скорость. Мёртвая зона для такого двигателя, у которого то напряжение питания всего 27 В более чем нормальная.
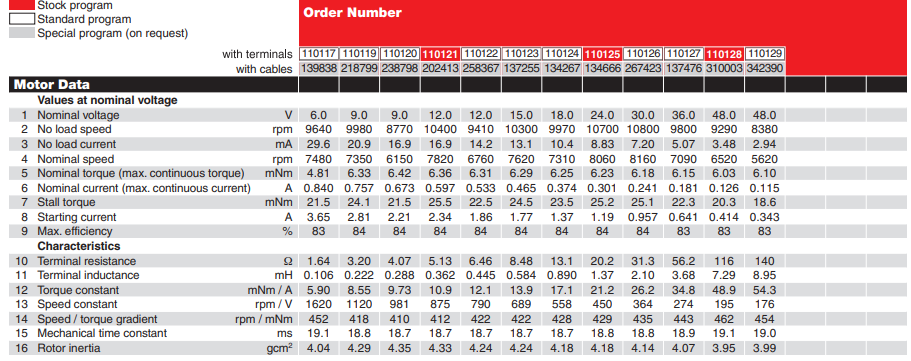
Ну почему же недопустимо, вот буржуи аж в даташитах на моторы некоторые константы приводят, в том числе и скоростную об/мин. / В (п.13):
Если у вас задачей является смена положения, то подавать 30 градусов ступенькой с выходом на насыщение по питанию, перерегулирование и потенциальное насыщение интегратора - не лучшая идея. Там нужен задатчик траектории.
Так ли тут нужен fpga? У микроконтроллера уже есть АЦП и линии ввода вывода под ШИМ, watchdog и интерфейсы для подключения к хосту
Фильтр с прямоугольным окном можно реализовать как аккумулятор накапливающий N отсчётов, линии задержки на N и вычитателя - каждый входной отсчёт суммируется с аккумулятором, а предNный - вычитается. Большее подавления могут обеспечить каскадные фильтры меньшей длины. Ну и по Найквисту частота дискретизации должна быть не сильно больше удвоенной полосы, зачем Вам всё это на 20 кГц? Данные с датчика можно оцифиовывать с учётом полосы помех, а управление осуществлять в соответствие с эээ.. забыл как это называется.. полосой пропускания без обратной связи?
Согласен, проще реализовать на МК, однако, как минимум, в авиации в целях резервирования существуют требования на разные элементные базы (то есть, в одной системе есть или МК, и FPGA , или 2 FPGA, или 2 МК: одно управляет, другое следит за правильностью управления), поэтому задачи реализации СУ для привода на FPGA есть. К тому же, этот проектик был больше исследовательским, чем реальным, и ясное дело, что в ракете уж точно целесообразнее использовать МК.
Да, знаю про реализацию с накоплением, но решил сделать так. Про частоту дискретизации: на рисунке представлены экспериментальны данные при периоде одного отсчёта 700 мкс и периоде фильтрации
 . Во время отработки при таком периоде привод совершал автоколебания малой амплитуды (красный график), был звук дребезга, явно ведь запаздывание по фазе большое при таком периоде. Поэтому решил уменьшить период.
. Во время отработки при таком периоде привод совершал автоколебания малой амплитуды (красный график), был звук дребезга, явно ведь запаздывание по фазе большое при таком периоде. Поэтому решил уменьшить период.
.")
В ЦОС, к сожалению, не силён, предполагаю, что в моих рассуждениях действительно могут быть ошибки.
Почему бы не сделать управление стиральной машиной, а не малогабаритной ракетой? Уже и детские коляски появились на литиевых аккумуляторах, но вы всё на смерть работаете.
Разработка системы управления электроприводом постоянного тока. Часть 1 — математическая модель