В прошлой статье мы рассмотрели концептуально все слои и функции, из которых будет состоять будущая модель. Сегодня мы выведем формулы, которые будут отвечать за обучение этой модели. Слои будем разбирать в обратном порядке — начиная с функции потерь и заканчивая сверточным слоем. Если возникнут трудности с пониманием формул, рекомендую ознакомиться с подробным объяснением (на картинках) метода обратного распространения ошибки, и также вспомнить о правиле дифференцирования сложной функции.
Вывод формулы для обратного распространения ошибки через функцию потерь
Это просто частная производная функции потерь
 по выходу модели.
по выходу модели.
С производной
 в числителе обращаемся как с производной от сложной функции:
в числителе обращаемся как с производной от сложной функции:  . Здесь, кстати, видно, как сокращаются
. Здесь, кстати, видно, как сокращаются  и
и  , и становится понятно, зачем в формуле мы изначально добавили
, и становится понятно, зачем в формуле мы изначально добавили Сначала я использовал среднеквадратическое отклонение, но для задачи классификации лучше применить cross-entropy (ссылка с объяснением). Ниже формула для backprop, попытался максимально подробно написать вывод формулы:

Помним, что

Вывод формулы backprop через функции активации
… через ReLU

где
 — обозначение backprop через функцию активации.
— обозначение backprop через функцию активации.То есть мы пропускаем ошибку через те элементы, которые были выбраны максимальными во время прямого прохождения через функцию активации (умножаем ошибку с предыдущих слоев на единицу), и не пропускаем для тех, которые не были выбраны и, соответственно, не повлияли на результат (умножаем ошибку с предыдущих слоев на ноль).
… через сигмоиду

Здесь нужно помнить, что

При этом
 — это формула сигмоиды
— это формула сигмоидыДалее обозначим
 как
как  (где
(где  )
)… также через softmax (или здесь)
Эти расчеты показались мне немного сложнее, так как функция softmax для i-того выхода зависит не только от своего
 , но и от всех других
, но и от всех других  , сумма которых лежит в знаменателе формулы для прямого прохожденя через сеть. Поэтому и формула для backprop “распадается” на две: частная производная по и
, сумма которых лежит в знаменателе формулы для прямого прохожденя через сеть. Поэтому и формула для backprop “распадается” на две: частная производная по и  :
:
Применяем формулу
 где
где  и
и 
При этом

И частная производная по
:
Исходя из формулы выше, есть нюанс с тем, что должна возвращать функция (в коде) при обратном распространении ошибки для
 при softmax, так как в этом случае для расчета одной
при softmax, так как в этом случае для расчета одной  используются все
используются все  , или, другими словами, каждая влияет на все
, или, другими словами, каждая влияет на все  :
:
В случае softmax
будет равен  (появилась сумма!), то есть:
(появилась сумма!), то есть:
При этом значения
 для всех
для всех  у нас есть, это backprop через лосс функцию. Осталось найти
у нас есть, это backprop через лосс функцию. Осталось найти  для всех и всех
для всех и всех  — то есть это матрица. Ниже матричное умножение в “развернутом” виде, чтобы лучше было понятно, почему — матрица и откуда появляется матричное умножение.
— то есть это матрица. Ниже матричное умножение в “развернутом” виде, чтобы лучше было понятно, почему — матрица и откуда появляется матричное умножение.
Речь шла как раз об этой последней в разложении матрице —
. Посмотрите, как при перемножении матриц  и мы получаем
и мы получаем  . А значит, выходом функции backprop (в коде) для softmax должна быть матрица , при умножении на которую уже рассчитанного на тот момент , мы и получим .
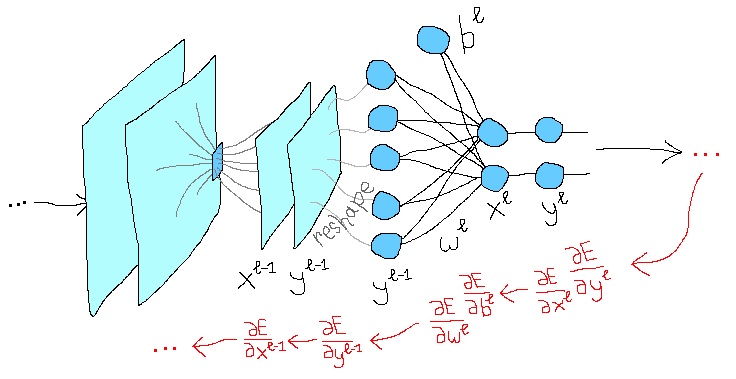
. А значит, выходом функции backprop (в коде) для softmax должна быть матрица , при умножении на которую уже рассчитанного на тот момент , мы и получим .Бэкпроп через полносвязную сеть

Вывод формулы backprop для обновления матрицы весов  fc-сети
fc-сети

Раскладываем сумму в числителе и получаем, что все частные производные равны нулю, кроме случая
 , что равняется
, что равняется  . Этот случай происходит, когда
. Этот случай происходит, когда  . Штрих здесь для обозначения “внутреннего” цикла по , то есть это совсем другой итератор, не связанный с из
. Штрих здесь для обозначения “внутреннего” цикла по , то есть это совсем другой итератор, не связанный с из 
И вот так это будет выглядеть матричном виде:

Размерность матрицы
 равна
равна  , и для того, чтобы произвести матричное умножение, матрицу следует транспонировать. Ниже привожу матрицы полностью, в “развернутом” виде, чтобы выкладки казались яснее.
, и для того, чтобы произвести матричное умножение, матрицу следует транспонировать. Ниже привожу матрицы полностью, в “развернутом” виде, чтобы выкладки казались яснее.
Вывод формулы backprop для обновления матрицы 
Для bias все вычисления очень схожи с предыдущим пунктом:

Понятно, что

В матричном виде тоже все довольно просто:

Вывод формулы backprop через
В формуле ниже сумма по
возникает от того, что каждый соединен с каждым (помним, что слой называется полносвязной)
Раскладываем числитель и видим, что все частные производные равны нулю, кроме того случая, когда
:
И в матричном виде:

Далее матрицы в “раскрытом” виде. Замечу, что индексы самой последней матрицы я намеренно оставил в том виде, в каком они были до транспонирования, чтобы лучше было видно, какой элемент куда перешел после транспонирования.

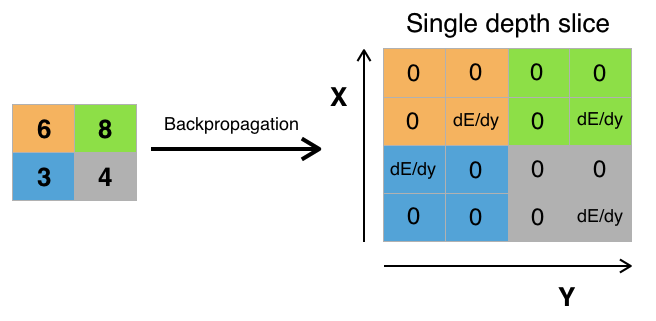
Бэкпроп через макспулинг
Ошибка “проходит” только через те значения исходной матрицы, которые были выбраны максимальными на шаге макспулинга. Остальные значения ошибки для матрицы будут равны нулю (что логично, ведь значения по этим элементам не были выбраны функцией макспулинга во время прямого прохождения через сеть и, соответственно, никак не повлияли на итоговый результат).
Вот демонстрация макспулинга на python:
demo_of_maxpooling.ipynb
Здесь вторая матрица, которую возвращает функция, и есть координаты выбранных максимальных значений на этапе макспулинга.
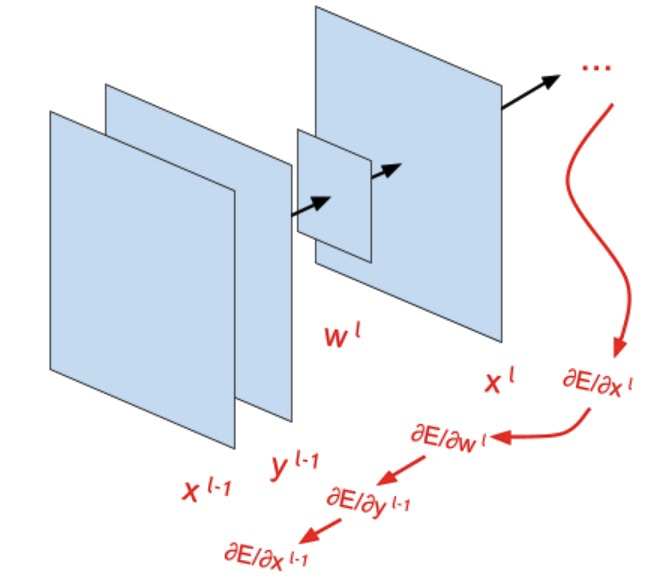
Бэкпроп через сверточную сеть
Вывод формулы backprop для обновления ядра свертки

(1) здесь просто подставляем формулу для
 , штрихи над
, штрихи над  и
и  просто обозначают, что это другой итератор.
просто обозначают, что это другой итератор.(2) здесь раскладываем сумму в числителе по
 и
и  :
:
то есть все частные производные в числителе, кроме тех, для которых которых
 , будут равны нулю. При этом
, будут равны нулю. При этом  равен
равен 
Все выше относится к конволюции. Формула backprop для кросс-корреляции выглядит аналогично, за исключением смены знака при
и :
Здесь важно увидеть, что в итоговой формуле не участвует само ядро свертки. Происходит некое подобие операции свертки, но с участием уже
 и , причем в роли ядра выступает , но все-таки это мало напоминает свертку, особенно при значении шага больше единицы: тогда “распадается” по , что совсем перестает напоминать привычную свертку. Этот “распад” происходит от того, что параметры и
и , причем в роли ядра выступает , но все-таки это мало напоминает свертку, особенно при значении шага больше единицы: тогда “распадается” по , что совсем перестает напоминать привычную свертку. Этот “распад” происходит от того, что параметры и  итерируются внутри цикла формулы. Посмотреть, как все это выглядит, можно с помощью демонстрационного кода:
итерируются внутри цикла формулы. Посмотреть, как все это выглядит, можно с помощью демонстрационного кода:demo_of_conv_backprop_through_kernel.ipynb
Вывод формулы backprop для обновления весов bias
Аналогично предыдущему пункту, только заменяем
 на . Будем использовать один bias для одной карты признаков:
на . Будем использовать один bias для одной карты признаков:
то есть, если разложить сумму по всем
и , мы увидим, что все частные производные по  будут равны единице:
будут равны единице:
Для одной карты признаков всего один bias, который “связан” со всеми элементами этой карты. Соответственно, при корректировке значения bias должны учитываться все значения из карты, полученные при обратном распространении ошибки. В качества альтернативного варианта можно брать столько bias для отдельной карты признаков, сколько элементов находится в этой карте, но в таком случае параметров bias будем слишком много — больше, чем параметров самих ядер свертки. Для второго случая также легко посчитать производную — тогда каждая
 (обратите внимание, у bias уже появились подстрочные индексы
(обратите внимание, у bias уже появились подстрочные индексы  ) будет равна каждой .
) будет равна каждой .Вывод формулы backprop через слой конволюции
Здесь все аналогично предыдущим выводам:

Раскладывая сумму в числителе по
и , получим, что все частные производные равны нулю, кроме того случая, когда  и
и  , и, соответственно,
, и, соответственно,  ,
,  . Это справедливо только для конволюции, для кросс-корреляции должно быть
. Это справедливо только для конволюции, для кросс-корреляции должно быть  и
и  и, соответственно,
и, соответственно,  и
и  . И тогда итоговая формула в случае кросс-корреляции будет выглядеть так:
. И тогда итоговая формула в случае кросс-корреляции будет выглядеть так:
Получившиеся выражения — это та же самая операция свертки, причем в качестве ядра выступает знакомое нам ядро
. Но, правда, все похоже на привычную свертку только если stride равен единице, в случаях же другого шага, получается уже что-то совсем другое (аналогично случаю backprop для обновления ядра свертки): матрица начинает “ломаться” по всей матрице , захватывая разные ее части (опять-таки потому, что индексы  и
и  при итерируются внутри цикла формулы).
при итерируются внутри цикла формулы).Здесь можно посмотреть демонстрационный код:
demo_of_conv_backprop_through_input.ipynb
Интересно, что если мы выполняем кросс-корреляцию, то на этапе прямого прохождения через сеть мы не переворачиваем ядро свертки, но переворачиваем его при обратном распространении ошибки при прохождении через слой свертки. Если же применяем формулу конволюции — все происходит ровно наоборот.
В этой статье мы вывели и подробно рассмотрели все формулы обратного распространения ошибки, то есть формулы, позволяющие будущей модели обучаться. В следующей статье мы соединим все это в один цельный код, который и будет называться сверточной сетью, и попробуем эту сеть обучить предсказывать классы на настоящем датасете. А также проверим, насколько все вычисления корректны в сравнении с библиотекой для машинного обучения pytorch.
Следующая часть серии: Сверточная сеть на python. Часть 3. Применение модели
