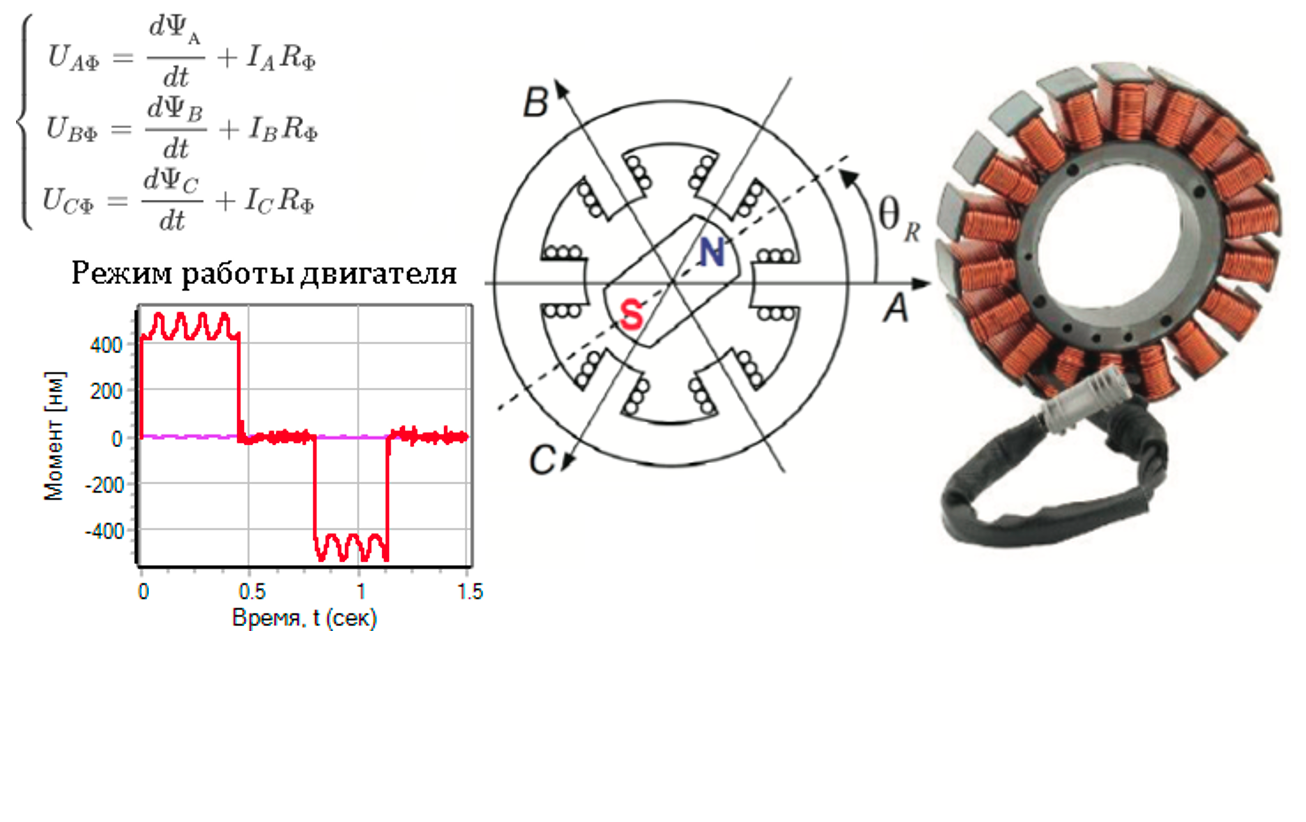
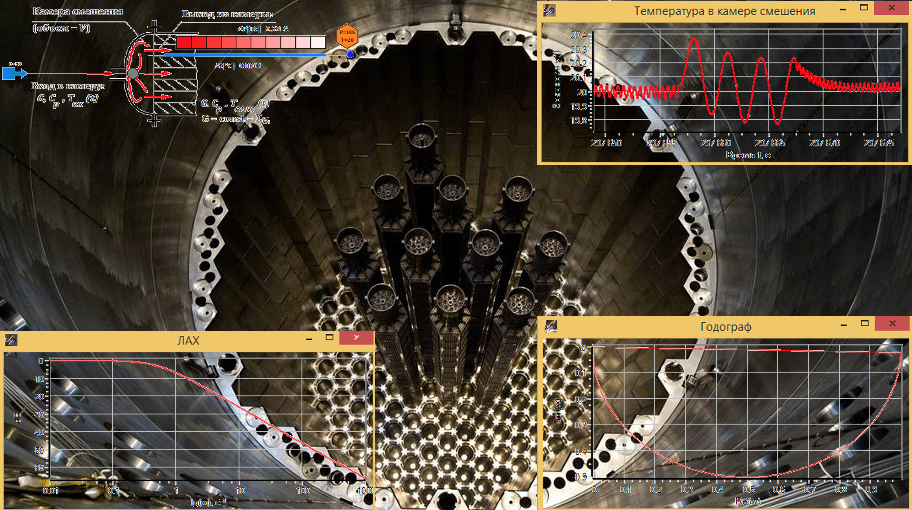
Продолжение серии публикаций по модельно-ориентированному проектированию. Ранее я рассказывал о моделировании на земле, (системы управления АЭС), в воздухе (Коптер, СКВ самолета), под водой (управление подводной системы добычи газа). Мы рассматривали модели отдельных устройства (электродивигатели, приводы, преобразователи тока) и даже просто груз на пружинке. Сегодня пример моделирования из станы восходящего солнца, рассматривается динамика объекта весом более 60 000 тон, при полной загрузке.
В этой статье специалистов Национального морского института (Япония) рассматривается моделирование движения морского судна. В тексте подробно пошагово описана методология создания моделей, поэтому ее вополне можно рассмативать как учебную.
Несколько цитат:
...Методики моделирования и расчетов пропульсивных систем судов приобретают все более важное значение в решении вышеуказанных комплексных проблем. Особенно, когда становится важной одновременная оценка эффективности, безопасности и надежности пропульсивных систем в реальных условиях эксплуатации и переходных режимах работы.
...Методология системного анализа применяется для решения задач комплексного моделирования интегрированной пропульсивной системы судна. Системный анализ — это набор методологий и инструментов для расчетного моделирования динамических процессов, который обеспечивает целостное понимание работы системы и выявления существенных взаимосвязей между подсистемами...
... созданная структура модели, очень хорошо подходит для использования в модельно-ориентированном проектировании, например для виртуальных испытаний и цифровых двойников. Цифровые двойники обеспечивают связь данных реального мира с системной моделью, фокусируясь на различных аспектах работы системы в реальном времени и в динамических режимах в условиях реальной эксплуатации.