
Как автоматизировать процессы с помощью low code конструкторов: пример платных парковок
4 мин
Давно хотел погрузиться в нишу No code или Zero code. И вот наконец появилась задачка, которую решил собрать на конструкторах.
Одна сеть Магазинов с большими парковками решили автоматизировать работу своего парковочного пространства. Нужно было собрать ботак, который должен был научиться собирать платежи за парковку, оформлять абонементы с рекуррентными платежами.
Ребята хотели помочь людям быстро оплачивать парковочное место, а также стимулировать их пользоваться парковкой как отдельным продуктом (то есть просто оставлять автомобиль на этой парковке и идти по своим делам, а не в сам гипермаркет).
Дано
Одна сеть Магазинов с большими парковками решили автоматизировать работу своего парковочного пространства. Нужно было собрать ботак, который должен был научиться собирать платежи за парковку, оформлять абонементы с рекуррентными платежами.
Ребята хотели помочь людям быстро оплачивать парковочное место, а также стимулировать их пользоваться парковкой как отдельным продуктом (то есть просто оставлять автомобиль на этой парковке и идти по своим делам, а не в сам гипермаркет).







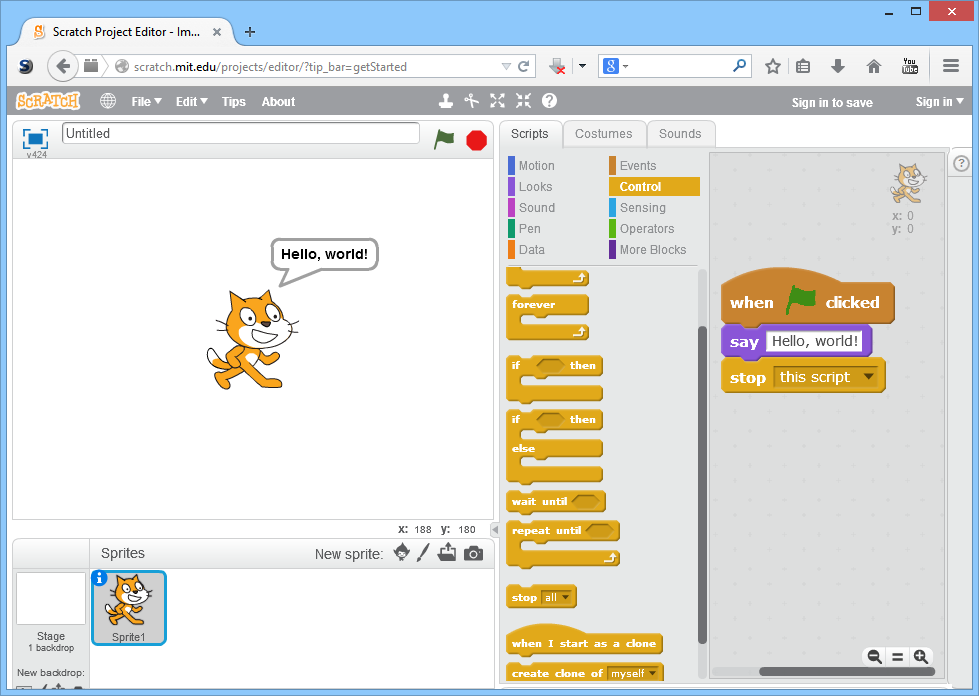
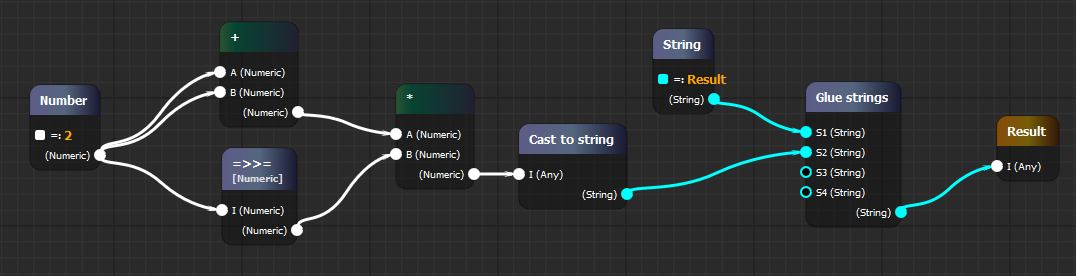
 При решении задач визуализации информации, очевидно, возникает вопрос о практической реализации задуманного. Данный цикл статей посвящен процессу проектирования приложений с помощью визуального программирования в Max 7 от компании Cycling '74. Начнем изучение вопроса, от простого к сложному. Пройдем путь от любительской заготовки до полноценного «однофайлового» приложения (standalone .exe).
При решении задач визуализации информации, очевидно, возникает вопрос о практической реализации задуманного. Данный цикл статей посвящен процессу проектирования приложений с помощью визуального программирования в Max 7 от компании Cycling '74. Начнем изучение вопроса, от простого к сложному. Пройдем путь от любительской заготовки до полноценного «однофайлового» приложения (standalone .exe). 