Продолжаем освоение микроконтроллеров Kinetis. На этот раз освоим среду разработки KDS и запрограммируем вывод меандра. Выясним сколько на это нужно времени. Узнаем какой максимальной частоты меандра можем добиться и обнаружим удивительное быстродействие портов Kinetis. И конечно же напишем классический «Hello, world!» с выводом через UART на скорости в 1.5 Мбит/c.
Продолжаем разработку на микроконтроллерах семейства Kinetis.
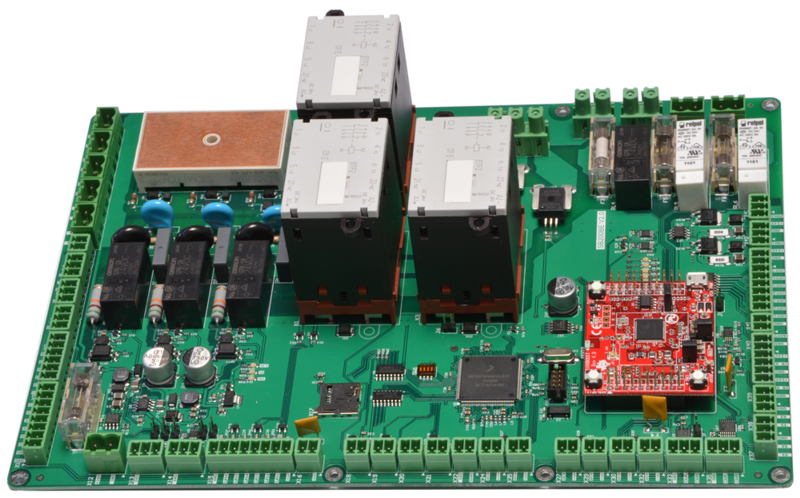
Умный дом или здание не ограничиваются только датчиками температуры или освещением. Там также присутствуют лифты, различные подъемники для людей с ограниченными физическими возможностями, грузовые подъемники, ворота, шлагбаумы, насосы, вентиляторы и прочее хозяйство. Традиционно это консервативные области, в них концепции умного дома проникают с трудом. Данная плата позволяет модернизировать устоявшиеся решения и добавить в них интеграцию в IoT (интернет вещей).
На самом деле вариантов использования у этого модуля может быть больше, но названное применение было толчком к разработке.
Как известно, привезенные из США автомобили славятся своей дешевизной. Но при попытке получить разрешение на эксплуатацию в Европе новые владельцы таких машин сталкиваются с несоответствием стандартов на фары и сигнальные фонари в Америке и Европе. Приходится менять фары и задние огни. И тут подстерегает следующая неожиданность.
После беглого знакомства в прошлой статье с микроконтроллерами семейства Kinetis от фирмы Freescale я хотел бы представить проект микроконтроллерного модуля на этих чипах.
С некоторых пор фирма Segger предлагает технологию Real Time Terminal (RTT) для своих JTAG адаптеров J-Link. Суть ее в том, что программа на микроконтроллере может выводить и принимать отладочную информацию из JTAG/SWJ-DP порта, как это обычно делается через UART. И тогда нам больше не нужен реальный отладочный UART. Далее чуть подробнее о возможностях этой технологии.
На Хабре уже есть пара статей о работе с RGB светодиодами WS2112B, но почему-то они все используют довольно архаичный способ формирования битовой последовательности. Способ заключается в формировании точных интервалов времени с помощью пустых программных циклов. Возможно, это издержки использования Arduino, но мы, конечно, уже давно перешли на ARM Cortex-M4 в лице STM32 и можем себе позволить сделать красивее.
Время от времени меня тоже охватывает потребность что-то поменять. И чаще всего я меняю в своих разработках семейство микроконтроллеров. И я не одинок в этом. Каждый год не менее 50% разработчиков меняют процессор, на котором будут выполнять следующие проекты. На этот раз я решил попробовать семейство Kinetis.
Важнейшим вопросом в разработке радиоэлектронных устройств всегда является вопрос «сколько это будет стоить?» Причем точный ответ желательно знать еще до того, как вы втянулись в дебри разработки и вложились в нее временем и средствами. Чаще всего разработчики сосредотачивают внимание на себестоимости комплектующих.
На самом деле, расчет себестоимости по списку деталей — это неприятный и рутинный процесс, связанный с долгими поисками по on-line каталогам, обзвоном дистрибуторов, перепиской и ожиданием ответов и проч. и проч. Но хуже даже не это, а то, что это итерационный процесс. Увидев вдруг, что себестоимость оказалась выше допустимой, разработчик начинает искать другие варианты схемотехники и другие комплектующие. И снова поиски…. А рутина — это враг разработчика. Чтобы ее избежать, многие жертвуют оптимальностью. Но, к счастью, эту проблему можно облегчить.


 На самом деле вариантов использования у этого модуля может быть больше, но названное применение было толчком к разработке.
На самом деле вариантов использования у этого модуля может быть больше, но названное применение было толчком к разработке.