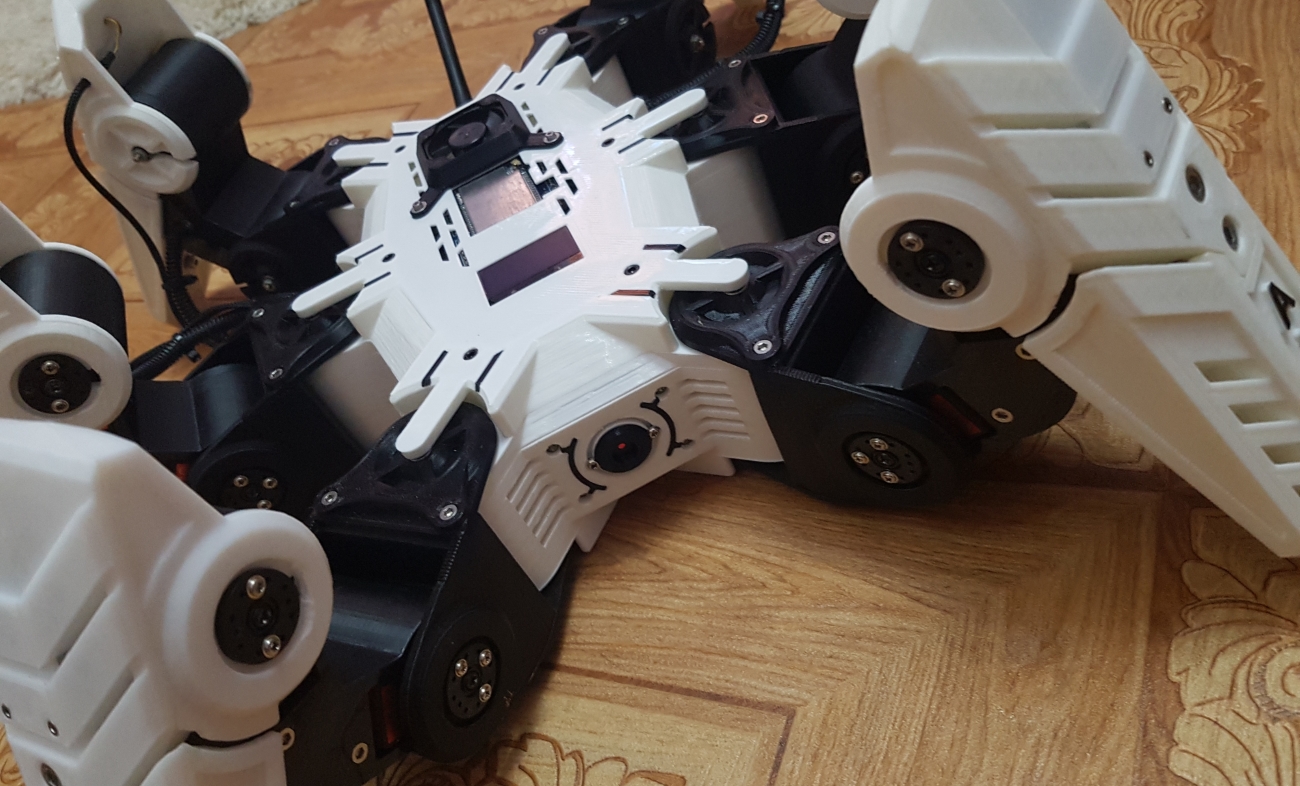
Несколько частей назад в гексаподе обновился алгоритм передвижения, который позволяет в реальном времени изменять угол поворота, скорость и направление движения. Раньше это были отдельные заскриптованные движения.
Также в гексаподе появилась стабилизация тела относительно горизонта на базе MPU6050. Прошивка сама компенсирует углы наклона во время движения — в будущем это очень пригодится, когда я буду реализовывать адаптацию к неровностям. В этом направлении уже ведутся разработки (датчики касания на базе тензорезисторов), настало время для следующего шага.
В этой статье расскажу, насколько простая может быть математика ядра передвижения гексапода и какие красивые движения можно выполнять с помощью неё. Разработка продолжается, и я переписал около 80% математики. Это позволило выкинуть явное указание координат точек назначения во время движения — траектории теперь строятся в реальном времени. Все технические подробности в статье. Как всегда, вас ждёт фото и видео.