Недавно столкнулся с тривиальной задачей — управление вытяжным вентилятором дома в ванной комнате.
Казалось бы чего проще, подключил его к выключателю света и готово. Но, время работы света непостоянно и может быть недостаточно для уменьшения влажности, хотя данную проблему можно решить установкой таймера. К тому же, моим близким очень не нравится работающий вентилятор при принятии водных процедур, так как он «создает холодный ветер».
Вторым очевидным решением было просто посадить вентилятор на отдельный выключатель и предоставить управление человеку. Но человеческий фактор таков, что вентилятор постоянно забывали включать, а если включали, то выключать. Эффективность работы вентилятора быстро стремилась к нулю.
Пришлось подключить к делу свое увлечение Arduino и несложными микроконтроллерами.
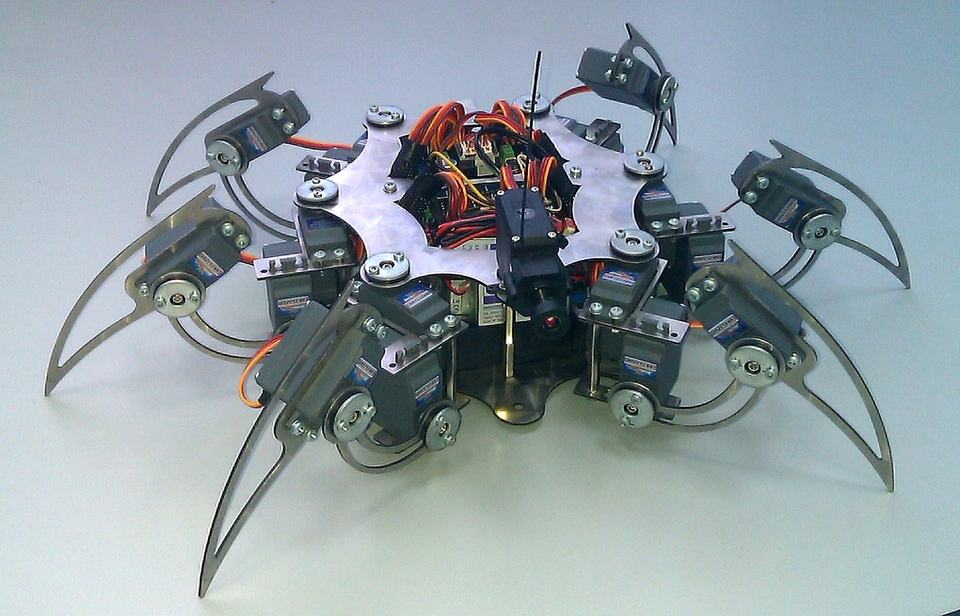
Робот гексапод — это платформа, использующая для передвижения шесть ног. После просмотра множества видео в интернете, стало ясно, что очень интересно наблюдать за передвижением подобных роботов. И тут возникло желание сделать что-то похожее, но с одноплатным компьютером BeagleBone Black (далее BBB) на борту, потому что подобных проектов еще не было. Информацию о таких роботах было найти непросто, особенно, что касается программной составляющей. Некоторое время было непонятно с чего начинать, но вскоре было решено начать с изготовления конструктива робота — шасси и электронной составляющей, а затем заняться программированием того, что получилось.
В последующем изложении хотел бы продемонстрировать реализацию шестиконечного манипулятора HEXAPOD, выполненного из корабельной стали. Текущий проект не претендует на оригинальность, инновационные подходы, реализацию сложных алгоритмов управления, использования математических моделей поведения, а так же изначальное проектирование уже существующих и эффективно работающих аппаратных средств. В текущей статье я постараюсь изложить собственный подход к реализации манипулятора из максимально доступных средств и материалов периферийного города.
Нет ничего прекраснее, чем сидеть в лаборатории и гладить толстую плешивую крысу в поисках вдохновения.
Итак, сегодня у нас будет немного необычный DIY-пост. Делать руками мы ничего не будем. Arduino и прошивок в 30 строк на Brainfuck тоже не будет. Мы попробуем взглянуть на привычные вещи под необычным углом.
Все мы привыкли к классическим для этой области материалам вроде текстолита, оловянного припоя и прочих радостей любителей повыпиливать лобзиком потравить платы. В этой статье мы попробуем найти интересные альтернативы привычным техпроцессам в несколько непривычной области — стоматологии. Зубные техники и стоматологи работают с целой кучей полимеров, композитов и много с чем еще. Я не буду давать конкретных рецептов применения, а просто дам общее направление для самостоятельных экспериментов.
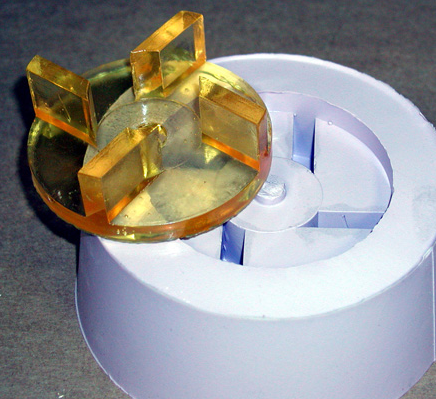
В прошлой статье я описал мой путь по созданию опытной партии изделия, в ней я литье в силикон отдал на аутсорс. Пока я ждал выполнения моего заказа, потихоньку сам начал осваивать это ремесло. Статья будет полезна тем, у кого допустим есть плата какого-нибудь девайса, но нету красивого корпуса, 3д-печать не подходит по характеристикам, а делать сразу промышленную пресс-форму очень дорого.
Хотел бы поведать вам о своем проекте, чтобы бы узнать мнение о нем. Обоснованная критика и пожелания приветствуются с распростертыми объятиями. Если появится интерес, напишу серию статей о том, как проект создавался, поделюсь крупицей своего опыта. Итак, начнем.
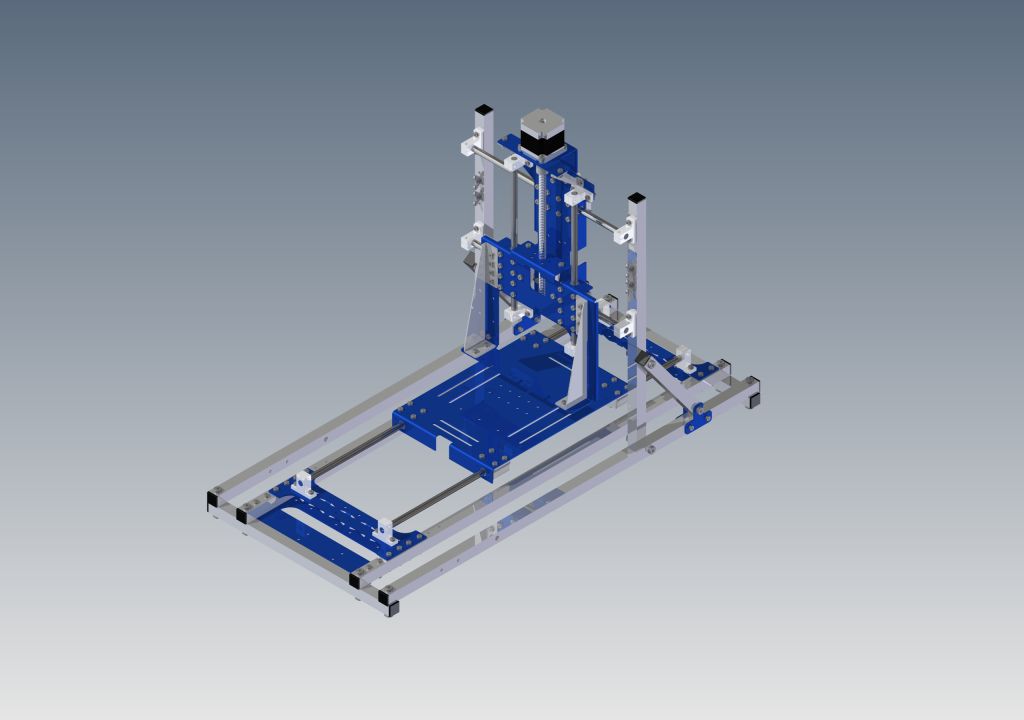
Недавно пришла идея по созданию полностью открытого проекта универсальной 3-координатной платформы, которая может выполнять функционал и 3d-принтера, и фрезерного станка для обработки пластика и многого другого. Платформа построена по модульному типу. Это означает, что в ней полностью взаимозаменяемые привода перемещения кареток и инструмент. Назвали мы эту штуку «Платформа RRaptor». В дальнейшем приведу ряд изображений и фотографий проектных моделей и того, что уже получилось реализовать.
На так давно я стал счастливым обладателем Raspberry Pi. С тех пор эксперименты не прекращаются. Сейчас балуюсь с камерой. В связи с этим захотелось реализовать трансляцию. Надеюсь, данная статья будет полезной таким же новичкам, как я.
Есть несколько способов разной степени сложности организовать трансляцию видео с камеры Raspberry Pi. Всё зависит от того, где именно вам необходимо принимать транслируемое. Рассмотрим некоторые из вариантов, двигаясь от простого к более сложному.
Давно мечтал сделать Wi-Fi робота, которым можно было бы управлять удаленно. И вот наконец настал тот день когда я смог управлять роботом через интернет, видеть и слышать все что происходит вокруг него.
Заинтересовавшихся приглашаю под кат
Автор оригинальной статьи Ali Mese добавил ещё 100 новых бесплатных сервисов. Все 400 потрясающих сервисов доступны здесь. И еще подборку +500 инструментов от 10 марта 2017 г. смотрите здесь.
A. Бесплатные Веб-Сайты + Логотипы + Хостинг + Выставление Счета
Отец попросил меня сделать автоматическую кормушку для аквариума. Не хотелось ему летом ездить каждый день с дачи домой, чтобы только покормить рыбок. Сначала я отправился с ним по китайским магазинам, там такую штуку можно за $10 купить, но он ничего не выбрал и пришлось кормушку делать самому.